Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Réalisation d'une maquette
de portail automatisé Sommaire : La partie du programme de technologie concernée Le matériel à rassembler La réalisation : Support / portes / assemblages La création de programmes de commande - classique (télécommandé) - avec des boutons poussoir Avec matériel LEGO NXT
 - avec des boutons poussoir. Avec matériel. LEGO NXT.")
2
Les capacités de niveau 2 peuvent êtres validées.
Les textes officiels Les capacités de niveau 2 peuvent êtres validées. Représentation du programme : Intégration d’une procédure d’arrêt d’urgence dans le déroulement du programme en utilisant les capteurs de contact. La condition logique de commande : Intégration d’une procédure d’ouverture des portes en utilisant un capteur de contact. Les portes s’ouvrent avec la télécommande OU avec le bouton poussoir. Indentification des composants d’une interface : Mise en œuvre de programmes différents intégrant les informations d’un ou plusieurs capteurs.

3
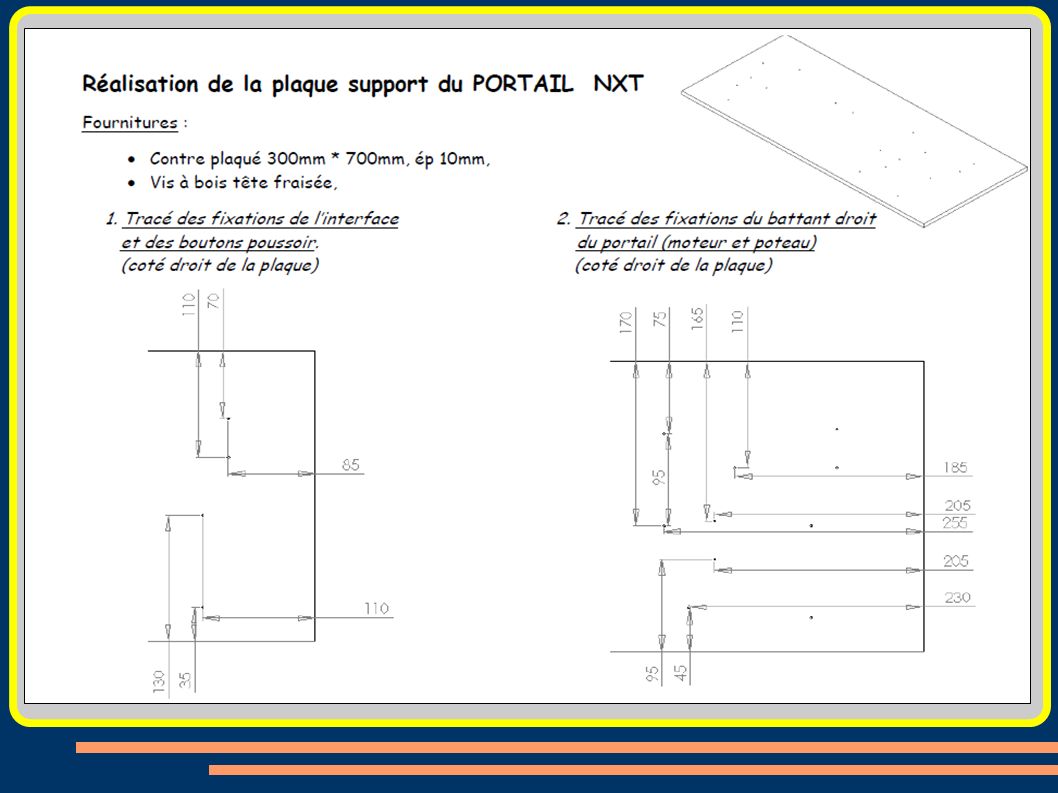
Le matériel : Kit Robotique Lego Mindstorms NXT 2.0 Une télécommande infrarouge (occasion possible) Une plaque de contreplaqué : épaisseur : 8 mm ou 10 mm dimensions : 700 mm x 300 mm Deux plaques en PVC expansé épaisseur : 3 mm dimensions : 150 mm x 140 mm Vis à bois : Tête fraisée, au moins 10mm de longueur sous tête 8 vis : tête fendue, 3 mm, longueur 20 mm. 8 écrous hexagonnaux correspondants. Une perceuse Un tournevis cruciforme

4
Réalisation des portes
3 mm X 8 140 68 15 28 45 150

7
Assemblage de la porte : battant gauche
1 Assemblage de la porte : battant gauche

8
2

9
3

10
Construction jambe de force porte gauche
4

11
5 6 Construction des gonds porte gauche
Construction de l'articulation porte gauche 6

12
7 Assemblage porte gauche

13
8 Assemblage porte droite : (idem pour le montant suivant)
Le capteur optique est à orienter face à la porte

14
9 Assemblage des capteurs de contact : boutons poussoir

15
Assemblage du capteur de distance à ultrasons
10 Assemblage du capteur de distance à ultrasons Il faut le positionner après les portes (en position ouvertes)
")
16
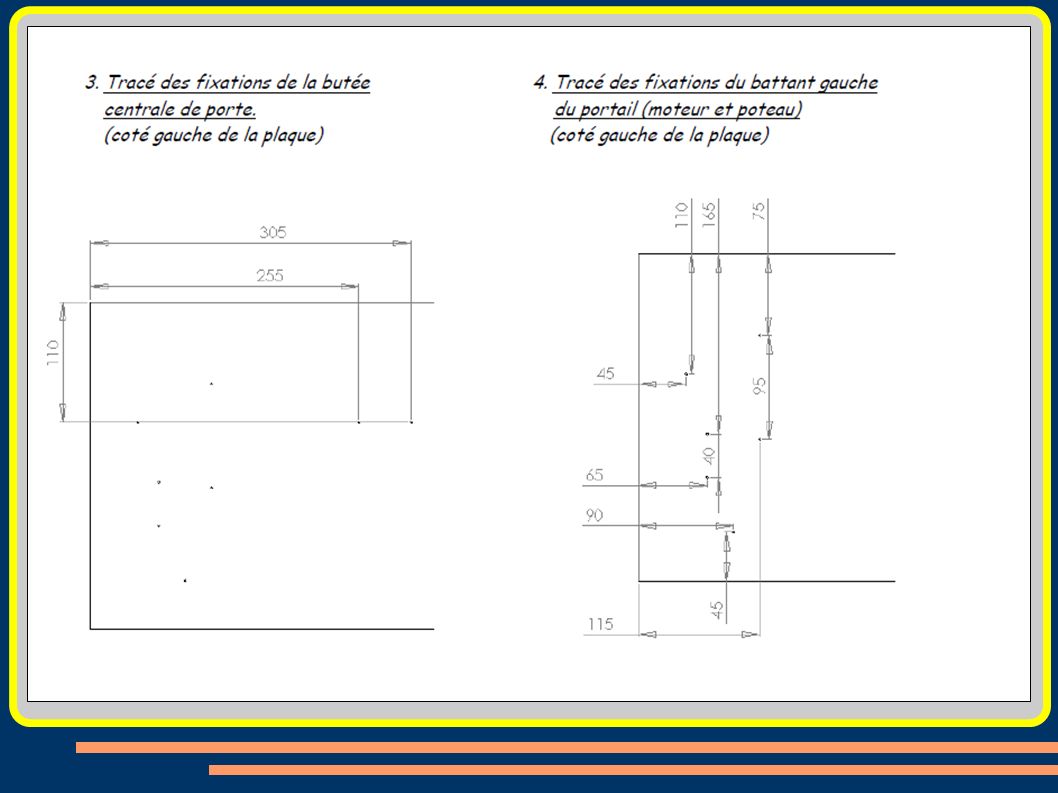
Fixation du microcontrôleur et de la butée des portes sur le support
11

17
Les constituants à utiliser
1 Création d’un programme de pilotage avec le logiciel NXT LEGO Mindstorms Les constituants à utiliser moteur moteur Les connexions : Capteurs de contact : entrées 1 et 2 Capteur de lumière : entrée 3 Capteur de distance : entrée 4 Moteur porte gauche : sortie A Moteur porte droite : sortie B Capteurs de contact Capteur de couleur utilisé en détecteur de lumière Capteur de distance à ultrasons

18
Création d’une boucle (répétition infinie ou sans fin d’un programme)
2 Création d’une boucle (répétition infinie ou sans fin d’un programme) Boucle La glisser au début du programme
 Boucle. La glisser au début du programme.")
19
Création d’un évènement à l’intérieur de la boucle :
3 Création d’un évènement à l’intérieur de la boucle : le capteur détecte t-il un rayonnement infrarouge ? Sens d’ exécution du programme Le détecteur optique est à sélectionner Attente d’un évènement lié à l’état d’un capteur Avec le bouton droit, accéder au type d’évènement Il est relié sur l’entrée 3 Il est utilisé en simple détecteur de lumière

20
4 Si le capteur détecte un rayonnement infrarouge quelle est l’action à accomplir ? Déclencher l’ouverture simultanée des deux portes La quantité d’énergie dispensée au moteur : 15% Les deux moteurs vont tourner en même temps Choix d’une action La rotation de l’axe des moteurs est à fixer à 170°

21
Si les portes sont ouvertes quels sont les évènements ?
5 Si les portes sont ouvertes quels sont les évènements ? Avant de refermer les portes, le véhicule doit avoir franchi le portail. On commence par créer une nouvelle attente d’évènement conditionnelle à l’état du capteur de distance à ultrasons On fixe la valeur de détection à moins de 20 cm ce qui correspond à la détection du véhicule à proximité du capteur

22
Quelle est l’action suivante ?
6 Si le véhicule est à proximité du capteur comment vérifier qu’il est passé ? On programme la réponse à un évènement relatif à la mesure effectuée par le capteur de distance Si la distance de mesure est supérieure à 60cm, le véhicule n’est plus devant le capteur, le programme peut continuer de s’éxécuter. Quelle est l’action suivante ? La programmation de la fermeture des portes Seul le sens est à modifier

23
Le programme de commande est maintenant terminé
7 Comment vérifier que la position des portes restera la même pour chaque cycle ? En initialisant les capteurs de rotation des moteurs A et B avant l’ouverture de la porte. Et avant qu’elles ne se referment Le programme de commande est maintenant terminé

24
Transférer le programme dans le micro-contrôleur NXT : 8
Enregistrer le programme : portetelecom.rbt Mettre en service le NXT Positionner les portes du portail en position fermée face à la butée Début du téléchargement Le programme démarre automatiquement Pointer la télécommande face au détecteur de lumière Appuyer sur une touche Les portes doivent s’ouvrir et s’arrêter Simuler le passage du véhicule devant le capteur de distance Les portes doivent se refermer si il est passé Si le fonctionnement est satisfaisant vous pouvez arrêter le programme

25
Exemple de programme : portesimple.rbt
Un appui sur le premier poussoir déclenche l’ouverture des portes. Un appui sur le second poussoir déclenche la fermeture des portes. Le cycle du programme se répète indéfiniment

Présentations similaires
















 sous-système électrique>")


