Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
GEO-6333 Bases technologiques

2
Qu’est-ce qu’un capteur numérique? Un appareil conçu pour la mesure du flux du RÉM à distance. Pour ce faire, il possède: -Un système pour viser un objet et collecter le RÉM provenant de cet objet; -Un système pour traduire le flux à un signal électrique mesurable -Un système pour codifier le signal et enregistrer les mesures sur medium informatique ou les télémétrer vers une station de réception terrestre

3
Qu’est-ce qu’un capteur numérique? Selon l’origine du rayonnement : -Les capteurs passifs mesurent le flux du RÉM qui existe dans la nature indépendamment d’eux (rayonnement émis par les objets; rayonnement solaire réfléchi) -Les capteurs actifs mesurent le flux du RÉM produit par leur propre source (laser, source micro-ondes) qui lui est retourné après interaction avec les objets.
 -Les capteurs actifs mesurent le flux du RÉM produit par leur propre source (laser, source micro-ondes) qui lui est retourné après interaction avec les objets..")
4
Qu’est-ce qu’un capteur numérique? Selon la constitution du système de collecte du RÉM: -Les capteurs optiques: on se sert d’éléments d’optique (miroirs, lentilles) pour recueillir le RÉM avec des longueurs d’onde UV proche, visible, infrarouge. Lorsque le capteur est actif les éléments d’optique servent aussi à concentrer le RÉM émis dans un « faisceau » étroit dirigé vers l’objet visé; -Les capteurs à antennes: on se sert des antennes avec leurs circuits électriques pour recueillir le RÉM (micro-ondes). Lorsque le capteur est actif l’antenne sert aussi à concentrer le RÉM émis dans un « faisceau » étroit dirigé vers l’objet visé.
 pour recueillir le RÉM avec des longueurs d’onde UV proche, visible, infrarouge. Lorsque le capteur est actif les éléments d’optique servent aussi à concentrer le RÉM émis dans un « faisceau » étroit dirigé vers l’objet visé; -Les capteurs à antennes: on se sert des antennes avec leurs circuits électriques pour recueillir le RÉM (micro-ondes). Lorsque le capteur est actif l’antenne sert aussi à concentrer le RÉM émis dans un « faisceau » étroit dirigé vers l’objet visé..")
5
Création DES DONNÉES numériques: PRINCIPE GÉNÉRAL Échantillonnage spatial du RÉM Conversion du RÉM en signal électrique Échantillonnage électronique du signal et conversion à des comptes numériques

6
Échantillonnage spatial 1-d: Les Profilomètres Domaine optique -Sondeurs atmosphériques (passifs ou actifs) -Domaine électrique Radiomètres hyperfréquences Altimètres radar Diffusiomètres
 -Domaine électrique Radiomètres hyperfréquences Altimètres radar Diffusiomètres")
7
Échantillonnage spatial 2-D PARTIEL Domaine optique - Altimètres laser Domaine électrique - Diffusiomètres

8
L’échantillonnage spatial Un exemple d’un échantillonnage 2-D partiel par un capteur LiDAR

9
Comment se forme une image numérique? Échantillonnage spatial 2-D exhaustif du RÉM

10
Comment se forme une image numérique? Deux façons d’échantillonner Balayage et instantané Optique instantané Optique balayage Radar (balayage) On se sert de la direction de propagation du RÉM pour positionner un échantillon spatial par rapport aux autres On se sert du temps aller retour du signal émis par le radar pour positionner un échantillon spatial par rapport aux autres
 On se sert de la direction de propagation du RÉM pour positionner un échantillon spatial par rapport aux autres On se sert du temps aller retour du signal émis par le radar pour positionner un échantillon spatial par rapport aux autres.")
11
Échantillonnage spatial 2-D Exhaustif: capteurs imageurs optiques Instantané [caméra photographiques] caméra numériques à matrice des CCD (Charge Coupled Device) Balayage espace objet [caméra photographiques panoramiques] [balayeurs optico-mécaniques] Balayage espace image mécaniques [caméra zonales] balayeurs à peigne ou à râteau Balayage espace image électronique
![Échantillonnage spatial 2-D Exhaustif: capteurs imageurs optiques Instantané [caméra photographiques] caméra numériques à matrice des CCD (Charge Coupled Device) Balayage espace objet [caméra photographiques panoramiques] [balayeurs optico-mécaniques] Balayage espace image mécaniques [caméra zonales] balayeurs à peigne ou à râteau Balayage espace image électronique](http://images.slideplayer.fr/25/7985450/slides/slide_11.jpg "Échantillonnage spatial 2-D Exhaustif: capteurs imageurs optiques Instantané [caméra photographiques] caméra numériques à matrice des CCD (Charge Coupled Device) Balayage espace objet [caméra photographiques panoramiques] [balayeurs optico-mécaniques] Balayage espace image mécaniques [caméra zonales] balayeurs à peigne ou à râteau Balayage espace image électronique")
12
Capteurs optiques: caméras à instantanés L’ensemble d’échantillons spatiaux couvrant la scène d’intérêt est prélevé Actuellement la plupart à bord d’avions À partir des altitudes orbitaux exemple: caméra à bord de la station spatiale Types d’images générées: panchromatiques; multispectrales (3 VIS standard + 1 PIR certaines)
")
13
Capteurs optiques: balayeurs ESPACE- OBJET (optico-mécaniques)) De plus en plus abandonnés en faveur des balayeurs espace- image
) De plus en plus abandonnés en faveur des balayeurs espace- image")
14
Balayeurs à râteau (exemple: HRVIR SPOT-4)
")
15
Capteurs optiques: L’UNITÉ D’ÉCHANTILLONNAGE résolution (géométrique) spatiale Capteur ETM+ de Landsat-7 (balayeur à fouet) Calculs Distance focale = 2,44 m Largeur et hauteur du détecteur (bandes spectrales du visible) = 103 m Altitude de vol = 705 km CVI (103 m /2,44 m) x 10 -6 m/ m = 42,5 x 10 -6 rad (nadir, θ=0 o ) CVIS L =CVIS H = (42,5x10 -6 rad) x 705 km x 10 3 m/km = 30 m Capteur IKONOS (balayeur à râteau) Calculs Distance focale = 10 m Taille d’un détecteur (Bande panchromatique) = 12 m Altitude de vol = 681 km Nombre de d é tecteurs: 12 000 CVI (12 m /10 m) x 10 -6 m/ m = 1,2 x 10 -6 rad CVIS (axe vertical) (1,2 x10 -6 rad) x 681000 m = 0,82 m Fauch é e 12 000 x 0,82 m 12 km CVI (rad) = d/f CVIS (m) = CVI x H
 spatiale Capteur ETM+ de Landsat-7 (balayeur à fouet) Calculs Distance focale = 2,44 m Largeur et hauteur du détecteur (bandes spectrales du visible) = 103 m Altitude de vol = 705 km CVI (103 m /2,44 m) x m/ m = 42,5 x rad (nadir, θ=0 o ) CVIS L =CVIS H = (42,5x10 -6 rad) x 705 km x 10 3 m/km = 30 m Capteur IKONOS (balayeur à râteau) Calculs Distance focale = 10 m Taille d’un détecteur (Bande panchromatique) = 12 m Altitude de vol = 681 km Nombre de d é tecteurs: CVI (12 m /10 m) x m/ m = 1,2 x rad CVIS (axe vertical) (1,2 x10 -6 rad) x m = 0,82 m Fauch é e x 0,82 m 12 km CVI (rad) = d/f CVIS (m) = CVI x H")
16
10 cm 25 cm 50 cm 100 cm

18
Échantillonnage électronique

19
Une image numérique Les valeurs numériques sont des entiers (par convention=codage) toujours positifs L’unité de base = le bit / Deux états possibles 0 ou 1 Un octet ou 8 bits (byte) 2 octets ou 16 bits
 toujours positifs L’unité de base = le bit / Deux états possibles 0 ou 1 Un octet ou 8 bits (byte) 2 octets ou 16 bits")
21
Une image numérique Le code binaire: un nombre entier positif est formé en assignant à chaque bit d’un groupe (1 octet, 2 octets, …) une puissance de 2 En 16 bits donc 2 16 (65536) valeurs possibles : 0-65535 2020 21212 2323 2424 2525 2626 2727 0 1 0 1 1 1 0 1 64 + 16 +8 +4 + 1 = 93 256 (2 8 ) valeurs possibles : 0- 255
 une puissance de 2 En 16 bits donc 2 16 (65536) valeurs possibles : = (2 8 ) valeurs possibles :")
22
Une image numérique Le code binaire: au cours de divers traitement l’échelle originale peut être transformée à une échelle avec des entiers positifs et négatifs ou des réels. Exemple d’un système « valeur absolue et signe », le nombre entier est formée en assignant à chaque bit d’un groupe moins 1 bit (1 octet, 2 octets, …) une puissance de 2, le dernier bit 0=positif 1=négatif Donc 16 bits avec signe valeurs possibles : - 32767 à +32767 2020 21212 2323 2424 2525 2626 0 1 0 1 0 0 0 0 64 + 16 = +90 valeurs possibles : -127 à + 127 1 1 0 1 0 0 0 0 1 64 + 16 = - 90
 une puissance de 2, le dernier bit 0=positif 1=négatif Donc 16 bits avec signe valeurs possibles : à = +90 valeurs possibles : -127 à =")
23
2 niveaux de gris 4 niveaux de gris 256 niveaux de gris Résolution radiométrique

24
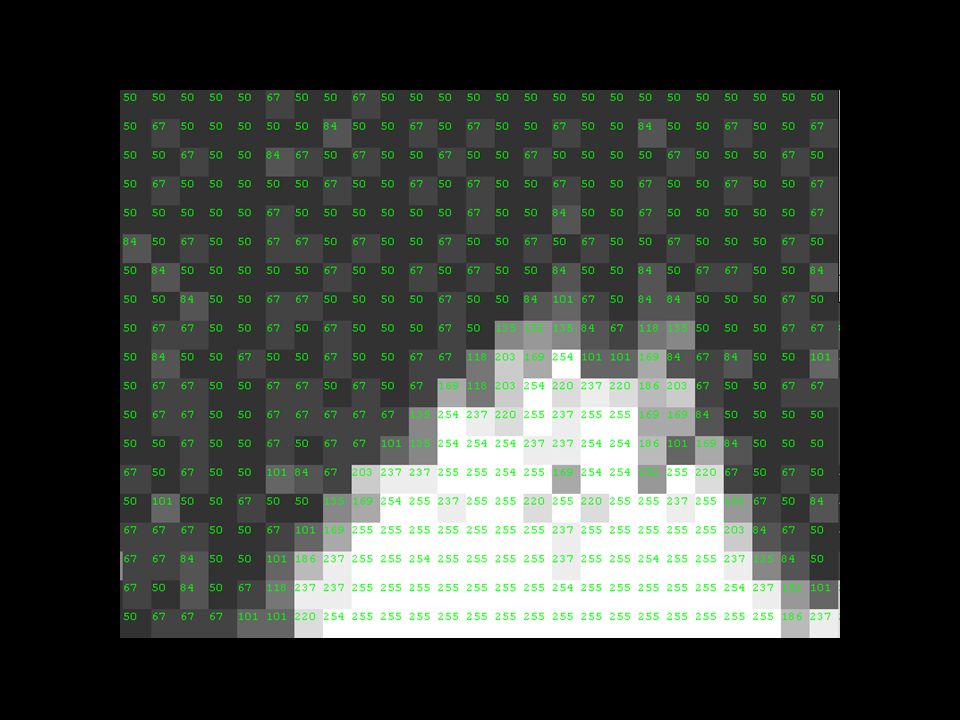
Le résultat de ce double échantillonnage = image numérique

25
Image numérique = un tableau des nombres entiers = une matrice Une matrice carrée Une matrice rectangulaire Un vecteur ligne

26
Une image numérique de télédétection n’est qu’un tableau de nombre entiers qui représentent la quantité du rayonnement électromagnétique réfléchi ou émis des objets. Nous pouvons la visualiser comme une image standard et l’analyser par ordinateur

28
Est-ce qu’on peut restituer la quantité du flux en sachant la valeur numérique? Oui pourvu que le capteur soit étalonné Le plus souvent: étalonnage linéaire Luminance = a*VN + b a = gain b = offset Exemple des fonctions d’étalonnages utilisées pour les images du capteur ETM+ de Landsat-7

29
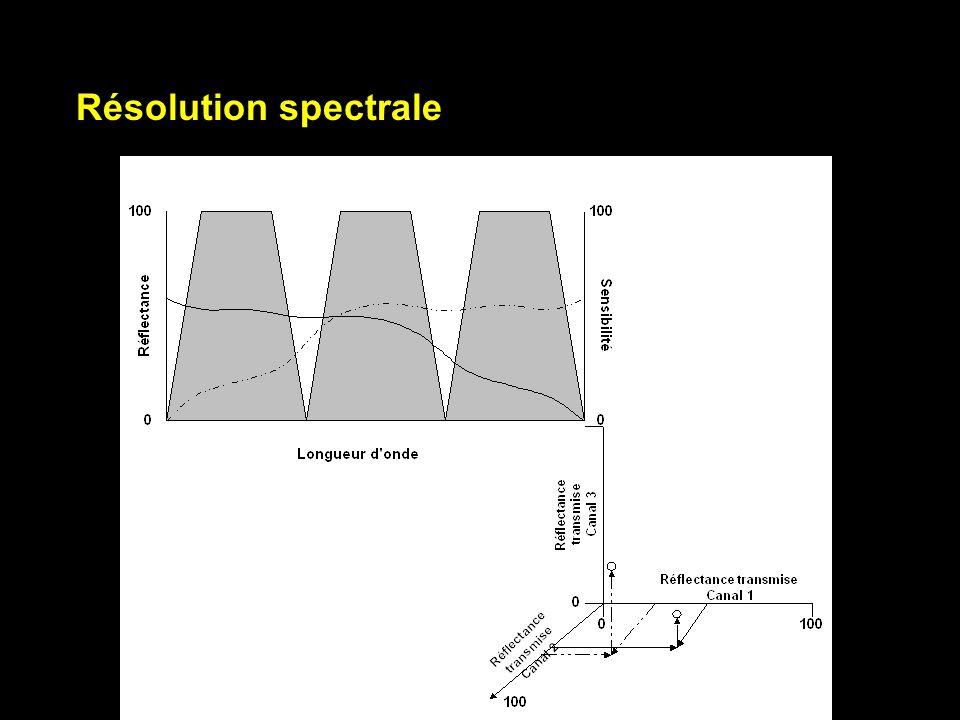
Et si l’on prend plusieurs mesures du flux en faisant varier une ou plusieurs propriétés du RÉM? Le capteur génère autant des matrices que les mesures prises (ou image multi-composante) Nous pouvons en choisir 3 et les visualiser en simultané comme une image couleur ou analyser l’ensemble par ordinateur Ci-contre exemple d’un capteur imageur du rayonnement solaire réfléchi qui effectue 4 mesures en simultané du flux en faisant varier la longueur d’onde (ici plutôt bandes de longueurs d’onde)
 Nous pouvons en choisir 3 et les visualiser en simultané comme une image couleur ou analyser l’ensemble par ordinateur Ci-contre exemple d’un capteur imageur du rayonnement solaire réfléchi qui effectue 4 mesures en simultané du flux en faisant varier la longueur d’onde (ici plutôt bandes de longueurs d’onde).")
30
Résolution spectrale

32
Hyperspectral

33
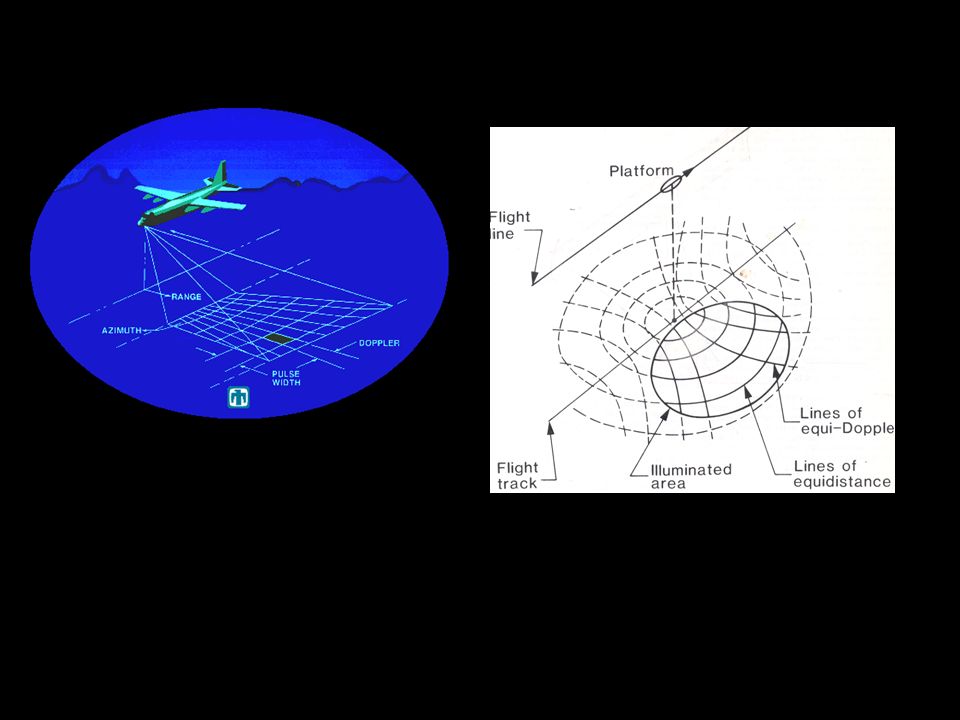
Les radars à ouverture DE SYNTHÈSE

35
Le principe de balayage Des impulsions sont émises à intervalle régulier. Pour chaque impulsion transmise une ligne de balayage est créée. L’antenne concentre l’énergie ÉM dans un faisceau étroit qui est dirigé latéralement vers la surface terrestre d’intérêt (Pourquoi?). Les objets situés le long de la trace du faisceau au sol reçoivent l’énergie à des moments différents selon leur distance au radar. Le rayonnement réfléchi arrive donc à des moments différents au radar qui mesure son intensité
. Les objets situés le long de la trace du faisceau au sol reçoivent l’énergie à des moments différents selon leur distance au radar. Le rayonnement réfléchi arrive donc à des moments différents au radar qui mesure son intensité.")
36
La résolution spatiale: le radar est un balayeur se servant du temps aller-retour des signaux

37
La direction azimutale Largeur très grande (plusieurs kilomètres à partir des satellites) utilisation d’une procédure spécifique appelée synthèse d’ouverture afin d’obtenir une résolution en azimut fine
 utilisation d’une procédure spécifique appelée synthèse d’ouverture afin d’obtenir une résolution en azimut fine")
39
4 m 400 km 2 km 8 m Résolution azimutale de l'antenne réelle Résolution azimutale de l'antenne synthétisée

40
La résolution radiométrique: problèmes avec le bruit du chatoiement

41
Les plates-formes de télédétection

42
Qu’est-ce qu’une plate-forme de télédétection? Tout véhicule aérien ou spatial susceptible de porter un ou plusieurs capteurs de télédétection ainsi que d’autres instruments et appareils accessoires (systèmes de contrôle, de positionnement et de télémétrie, enregistreuses des données, etc.). Capteurs et appareillage accessoire est appelé la charge utile. La plate-forme est un élément fondamental d’une mission de télédétection car elle se doit: -Supporter la charge utile et dans le cas d’une plate-forme dirigée, le personnel (pilotes, techniciens); -Assurer la plus grande stabilité des points de visée des capteurs; -Fournir l’énergie nécessaire au fonctionnement des appareils; -Assurer les télécommunications; -Protéger équipage et équipement de l’environnement dans lequel ils sont plongés (protection thermique, électrique, mécanique; protection contre les radiations pénétrantes; oxygène pour l’équipage).
. Capteurs et appareillage accessoire est appelé la charge utile. La plate-forme est un élément fondamental d’une mission de télédétection car elle se doit: -Supporter la charge utile et dans le cas d’une plate-forme dirigée, le personnel (pilotes, techniciens); -Assurer la plus grande stabilité des points de visée des capteurs; -Fournir l’énergie nécessaire au fonctionnement des appareils; -Assurer les télécommunications; -Protéger équipage et équipement de l’environnement dans lequel ils sont plongés (protection thermique, électrique, mécanique; protection contre les radiations pénétrantes; oxygène pour l’équipage)..")
43
Les plates-formes: typologie - Celles qui opèrent à quelques mètres du sol: grues, ou véhicules qui supportent des capteurs pour des études à petite échelle; - Celles qui opèrent entre la dizaine de mètres et la centaine de kilomètres: drones, avions, hélicoptères, ballons, fusées sonde;

44
- Celles qui opèrent entre 200 et 40 000 km: les satellites soumis à l'attraction terrestre, qu'ils soient habités ou non. Les plates-formes: typologie Les plus utilisées en télédétection: les avions et les satellites automatiques

45
Les avions

46
Les satellites automatiques: éléments d’orbitographie Un satellite automatique a une orbite régulière fixée une fois pour toutes. L’orbite du satellite est plane et peut être représentée par une ellipse dont un des foyers est le centre de la Terre (1 ère loi de Kepler). La position la plus rapprochée de la Terre est le périgée et la plus éloignée, l’apogée En télédétection l’on emploie des orbites quasi-circulaires
. La position la plus rapprochée de la Terre est le périgée et la plus éloignée, l’apogée En télédétection l’on emploie des orbites quasi-circulaires.")
47
Éléments d’orbitographie La vitesse du satellite est constante (2 ème loi de Kepler) Son mouvement est donc périodique et les conditions initiales désirées (position, vitesse et direction du mouvement) au moment où le satellite est abandonné par son lanceur, déterminent complètement ce mouvement
 Son mouvement est donc périodique et les conditions initiales désirées (position, vitesse et direction du mouvement) au moment où le satellite est abandonné par son lanceur, déterminent complètement ce mouvement")
48
Éléments d’orbitographie On appelle inclinaison l’angle dièdre formé entre le plan orbital du satellite et le plan équatorial de la Terre Ainsi si inclinaison: 0 0 orbite équatoriale; 90 0 orbite polaire; orbite à inclinaison quelconque Entre 0 0 et 90 0 mouvement direct ou prograde; Entre 90 0 et 180 0 mouvement rétrograde.

49
Types d’orbites: géostationnaires ou géosynchrones Le plan orbital coïncide avec le plan équatorial de la Terre (orbite équatoriale) L’altitude orbitale est de 36 000 km À cette distance, le satellite complète une révolution autour de la Terre à 24 heures. Puisque la Terre compète aussi une révolution autour de son axe à 24 heures, le satellite et la Terre meuvent ensemble (d’où le nom géosynchrone de géo = Terre + synchrone = qui a lieu en même temps). Ainsi, un tel satellite reste toujours directement au-dessus du même territoire (d’où le nom géostationnaire de géo = Terre + stationnaire= qui reste immobile). L’éloignement du satellite de la Terre ne permet pas d’acquérir d’images détaillées de la Terre mais en revanche sa stationnarité permet d’obtenir des images à forte cadence (1 image à toutes les 30 minutes environ). Ainsi il est utilisé pour l’observation des phénomènes dynamiques à grand déploiement (ouragans, fronts nuageux, etc.) Satellites utilisés aussi pour les télécommunications, télévision
. Ainsi, un tel satellite reste toujours directement au-dessus du même territoire (d’où le nom géostationnaire de géo = Terre + stationnaire= qui reste immobile). L’éloignement du satellite de la Terre ne permet pas d’acquérir d’images détaillées de la Terre mais en revanche sa stationnarité permet d’obtenir des images à forte cadence (1 image à toutes les 30 minutes environ). Ainsi il est utilisé pour l’observation des phénomènes dynamiques à grand déploiement (ouragans, fronts nuageux, etc.) Satellites utilisés aussi pour les télécommunications, télévision.")
50
Exemple de la couverture obtenue par un capteur optique à bord d’un satellite géostationnaire : GOES-8

51
Types d’orbites: orbites basses Lorsque le satellite orbite autour de la Terre à une altitude de plusieurs centaines de km (400- 900 km environ) nous l’appelons satellite à orbite basse. À cause de sa proximité de la Terre le satellite pour vaincre la gravité terrestre doit se déplacer le long de son orbite à une très grande vitesse: 27 359 km/h ou environ 7 km/sec!! Ainsi il fait le tour de la Terre à environ 90 minutes. Ces satellites sont d’un intérêt capital pour la télédétection des ressources terrestres car leur proximité de la Terre permet d’acquérir des images détaillées.

52
Segments d’une orbite Descendant le satellite se dirige du pôle nord au pôle sud Ascendant le satellite se dirige du pôle sud au pôle nord

53
Le plan orbital d’un satellite à orbite basse ne peut pas être équatorial. Il y a toujours une certaine inclinaison. Selon cette inclinaison un capteur à bord d’un satellite, en profitant du mouvement de la Terre, peut couvrir des territoires jusqu’à une certaine latitude de part et d’autre de l’équateur (amplitude zonale) Types d’orbites: orbites basses
 Types d’orbites: orbites basses.")
54
Orbites quasi-polaires héliosynchrones Une orbite de grand intérêt est l’orbite quasi-polaire circulaire et héliosynchrone. Le satellite se déplace presque dans la direction nord-sud et on conserve un angle constant entre le plan orbital et la direction Terre- Soleil tout le long d’une année Une telle orbite permet: - De couvrir l’ensemble de la surface terrestre dans un intervalle de temps donné (à l’exception des pôles). Cet intervalle peut aller de quelques jours à presque 1 mois. - De passer au-dessus du même territoire à la même heure locale (intéressant pour les études diachroniques) Plan orbital
. Cet intervalle peut aller de quelques jours à presque 1 mois. - De passer au-dessus du même territoire à la même heure locale (intéressant pour les études diachroniques) Plan orbital.")
55
Orbites héliosynchrones

56
Cependant … selon la saison l’angle du soleil peut varier

57
Orbite héliosynchrone crépusculaire Intéressante pour l’exposition des panneaux solaires (RADARSAT)
")
58
L’orientation de la trace au sol est fonction de l’altitude du satellite L’orientation de la trace au sol est une fonction de l’inclinaison du plan orbital du satellite La trace au sol du satellite

59
L’espacement entre deux traces successives (même segment orbital) dépend de la fauchée du capteur et de l’orientation de la trace au sol
 dépend de la fauchée du capteur et de l’orientation de la trace au sol")
60
Exemple: traces d’un satellite héliosynchrone (segment descendant) Orbit 16, day 2 Orbit 2, day 1 Orbit 15, day 2 Orbit 1, day 1 185 km wide 2875 km at equator 159 km
 Orbit 16, day 2 Orbit 2, day 1 Orbit 15, day 2 Orbit 1, day km wide 2875 km at equator 159 km")
61
Exemple: traces d’un satellite à orbite non héliosynchrone (segments descendant et ascendant)
")
62
Télémétrie

63
Résolution temporelle (ne s’applique qu’aux satellites) La fréquence avec laquelle nous pouvons créer des images du même territoire par un capteur satellital
 La fréquence avec laquelle nous pouvons créer des images du même territoire par un capteur satellital")
64
Pour accroître la résolution temporelle Dépointage du capteur: exemple SPOT Constellation des satellites

65
L’échelle

Présentations similaires