Télécharger la présentation
1
LES TORSEURS

2
Il existe deux types d’actions mécaniques:

3
F Les FORCES ( pousser / tirer selon un axe) - F F
 - F F")
4
C Les MOMENTS ( tourner / tordre autour d'un axe) C
 C")
5
On représente l'action mécanique par un vecteur et on a ses coordonnées dans le repère R:

6
Donc si représente une action mécanique de type FORCE du solide 4 sur le solide 7 dans un repère R. et représente une action mécanique de type MOMENT du solide 4 sur le solide 7 en A dans un repère R.

7
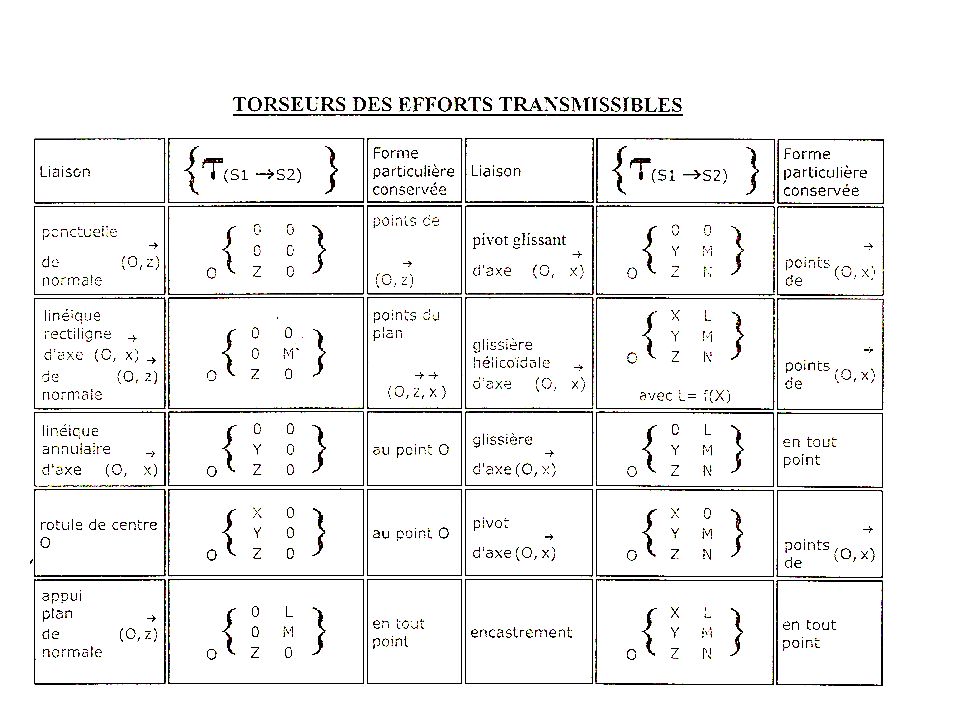
…….pour modéliser les actions mécaniques on utilise le Torseur des efforts transmissibles appelé aussi Torseur Statique. Les éléments de réduction du torseur des efforts transmissibles en A de la pièce 4 sur la pièce 7 dans une base orthonormée R s'écrit :

8
L'action mécanique de type Moment est le moment du Torseur
L'action mécanique de type Force est le résultante du Torseur

9
(S'il y a mouvement relatif il n'y a pas d'efforts transmissibles)
Pour trouver le torseur des efforts transmissibles entre deux solides il faut: 1- comprendre la liaison entre ces deux solides. Mettre un repère. 2- "remplir " le torseur en mettant "0" là où il y a mouvement relatif: (S'il y a mouvement relatif il n'y a pas d'efforts transmissibles) - au niveau de la résultante si mvt de translation. - au niveau du moment si mvt de rotation. Puis compléter le torseur.
 - au niveau de la résultante si mvt de translation. - au niveau du moment si mvt de rotation. Puis compléter le torseur.")
10
Sphère dans un cylindre
Exemple: linéaire annulaire en A d'axe x dans le repère R Sphère dans un cylindre A 3 rotations suivant x, y, z. 1 translation suivant x Y Z On complète

11
Ou bien, 2- bis: on met les composantes non nulles des efforts là où il n'y a pas mouvement. Puis on complète avec des "0".

12
Exemple la linéaire annulaire en A d'axe x dans le repère R
Transmission d'effort suivant Y et Z Y On complète avec des "0" Z

13
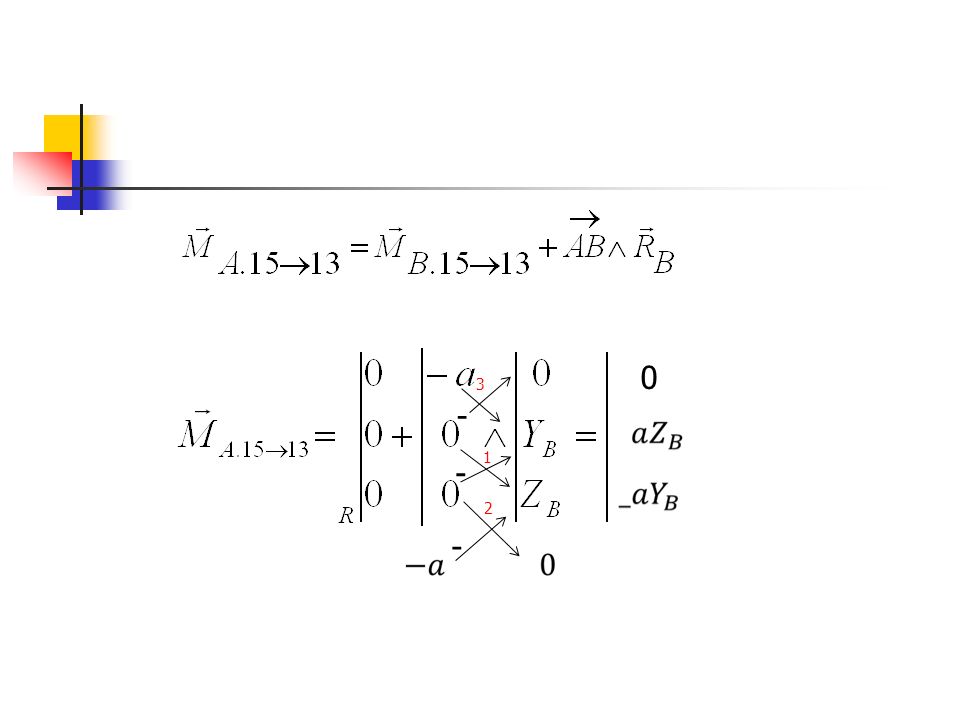
Si on veut déplacer le torseur écrit en A:

14
….pour l'écrire en B: avec BABAR

15
Le nombre de composantes non nulles du torseurs des efforts transmissibles est appelé degré de liaison ou nombre d'inconnues de liaison ou encore nombre de paramètres indépendants: ns ( ns < 6 )
")
16
Il existe deux sortes de mouvement:

17
la translation comme la tige du vérin:

18
la rotation comme la roue du vélo:

19
On représente la vitesse de translation et la vitesse de rotation par des vecteurs dans le repère R.

20
et La Vitesse de ROTATION du solide 7 par rapport à 4. avec
la Vitesse linéaire de A appartenant à 7 dans son mouvement par rapport à 4.

21
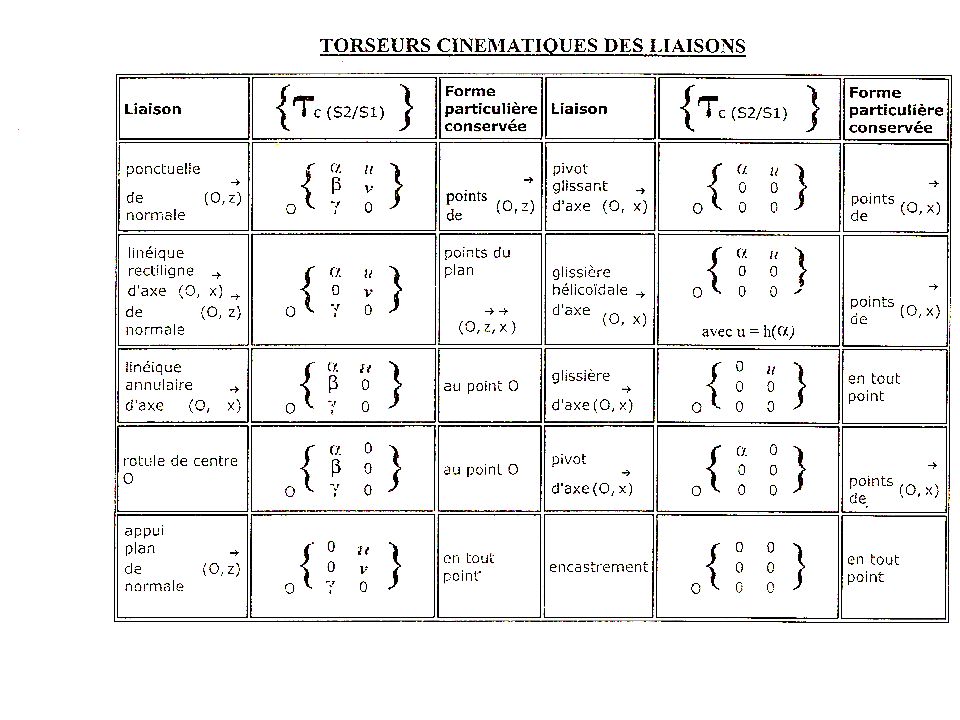
Pour modéliser le mouvement, on utilise le Torseur cinématique.
Les éléments de réduction du torseur cinématique de la pièce 7 par rapport à la pièce 4, en A dans une base orthonormée T sont définis par :

22
La vitesse de rotation de 7 par rapport à 4 est la résultante du Torseur
La vitesse du point A appartenant à 7 par rapport à 4 est le moment du Torseur

23
Sphère dans un cylindre
Exemple: linéaire annulaire en A d'axe x dans le repère R Sphère dans un cylindre A 3 rotations suivant x, y, z. a u 1 translation suivant x b g On complète

24
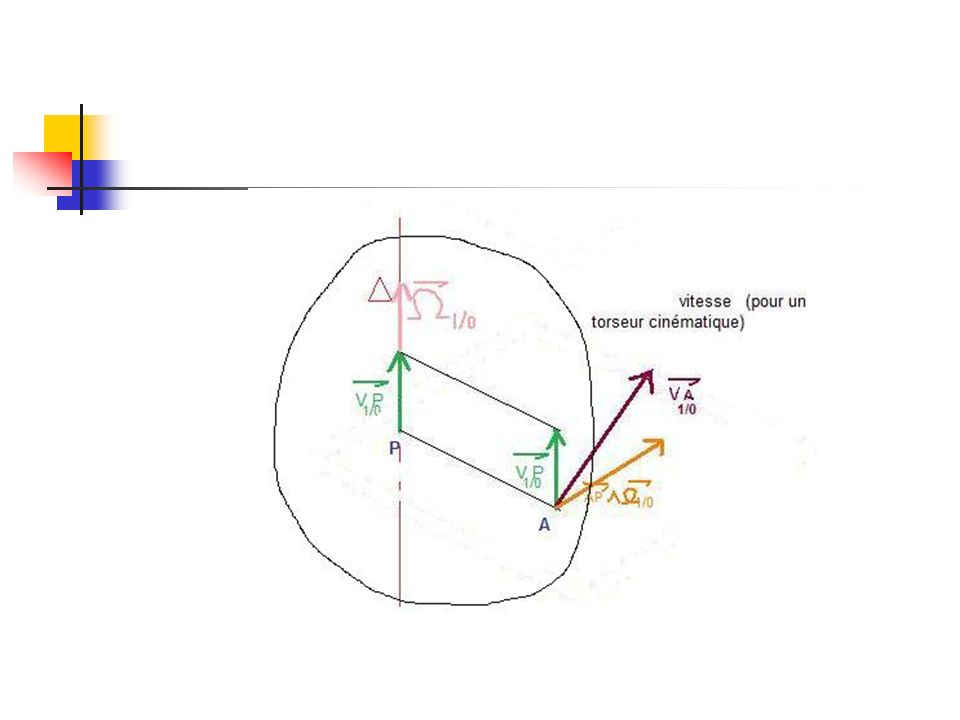
Si on veut déplacer le torseur cinématique écrit en A:

25
Pour l'écrire en B: avec et le vecteur moment en B

27
Le nombre de composantes non nulles du torseur cinématique est le degré de liberté de la liaison : nc ( nc < 6 )
")
28
Relation entre le Torseur Statique et le Torseur Cinématique
Exemple de la liaison linéaire annulaire en A: Complément en "croix" des termes nuls et non nuls.

31
Nous allons maintenant chercher les torseurs équivalents à plusieurs liaisons.

32
Chaînes ouvertes Un mécanisme à chaine ouverte de solides est, le plus souvent, un robot. Le premier solide étant le bâti et le dernier l'élément de préhension ou pince. Le graphe des liaisons d’une chaîne ouverte présente l’allure suivante :

33
Chaînes fermées Le graphe de structure présente la forme suivante :

34
Chaînes complexes Une chaîne complexe est constituée de plusieurs boucles fermées appelées cycles.

35
Liaisons cinématiquement équivalentes
Liaisons en série On obtient le torseur cinématique de la liaison équivalente en faisant la somme des Torseurs cinématiques des liaisons écrits en un même point.

36
On se propose de déterminer la liaison équivalente aux deux liaisons en série entre S2 et S0 et le schéma cinématique équivalent. Pour cela déterminons le torseur cinématique équivalent à cette liaison.

37
Schéma cinématique : -

38
= + = =

39
c’est donc une liaison ponctuelle en O de normale
= c’est donc une liaison ponctuelle en O de normale

40
L’Intérêt de la réalisation d'une liaison ponctuelle à l'aide d'un appui plan et d'une liaison rotule est d'avoir des liaisons à contact surfacique au lieu d'un contact ponctuel (pression infinie).
.")
41
Liaisons en parallèles:
le torseur statique équivalent est la somme des torseurs statiques de chaque liaison écrit en un même point.

42
On se propose de déterminer la liaison équivalente aux deux liaisons en parallèles entre S1 et S0 et le schéma cinématique équivalent. Pour cela déterminons le torseur statique équivalent à cette liaison

43
Graphe des liaisons : Schéma cinématique :

44
Ecriture des torseurs statiques:
En A : En B : Si on écrit tous les torseurs en A : C'est la formule ABABR ;-)
")
45
3 - - 1 2 -
46
devient La somme des torseurs donne C’est donc le torseur d’une liaison Pivot d’axe










 REVISION: TORSEUR D’ACTION MECANIQUE>")




 de longueur r et d'extrémité fixe O. Si nous appliquons à M.>")





