Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
le bus CAN

2
Origine du bus CAN : l’automobile
CAN : Controller Area Network 1983 : la société Bosch développe une solution de multiplexage des informations circulant à bord de la voiture en s’inspirant du bus I2C. 1984 : les clients de la société Bosh sont mis au courant du projet. 1985 : Intel réalise les premiers circuits intégrés, suivi par Philips et Siemens 1986 : le bus CAN devient normalisé ISO 1991 : 1ère voiture haut de gamme : 5 calculateurs & bus CAN 500 kbit/s

3
Renault 4L (1962)
")
4
Calculateur boîte de vitesse Potentiomètre position papillon
Citroën ZX (1994) Contrôle injection Calculateur boîte de vitesse Calculateur contrôle moteur Bus CAN 2.0A Moteur pas à pas BSI* Sonde à oxygène Thermistance air Thermistance eau Capteur de cliquetis Potentiomètre position papillon Prise diagnostic Sonde à oxygène Capteur de vitesse BSI : Boîtier de Servitude Intelligent (calculateur)
 Contrôle injection. Calculateur boîte de vitesse. Calculateur contrôle moteur. Bus CAN 2.0A. Moteur pas à pas. BSI* Sonde à oxygène. Thermistance air. Thermistance eau. Capteur de cliquetis. Potentiomètre position papillon. Prise diagnostic. Sonde à oxygène. Capteur de vitesse. BSI : Boîtier de Servitude Intelligent (calculateur)")
5
Un simple exemple de « câblage classique »
Certains capteurs ont des liaisons avec plusieurs calculateurs ou existent en 2 exemplaires en raison de leur localisation. Les liaisons entre boîtiers sont de + en + nombreuses

6
Pourquoi communiquer en réseau ?
Avant Jusqu’à 2 km Performances limitées Coût élevé De 50 à 100 kg 2cv Confort très limité Pollution Objectifs à atteindre de nos jours Limiter le poids, le coût et la complexité du câblage électrique Améliorer la sécurité par une assistance au conducteur Améliorer le confort Diminuer la consommation, réduire la pollution et optimiser les performances Evolution en cours de vie du véhicule (options logicielles) Faire allumer les feux de croisement lorsque le capteur de pluie détecte une averse (évolution d’un logiciel) Mise en action des feux de détresse lors d’une forte décélération
 Faire allumer les feux de croisement lorsque le capteur de pluie détecte une averse (évolution d’un logiciel) Mise en action des feux de détresse lors d’une forte décélération.")
7
Actuellement : explosion des systèmes électroniques embarqués
ABS REF ASR AFU ESP AFIL BMP6 A venir ABS (Anti Blocking System), REF (Répartiteur Electronique de Freinage) ou EBV (Elektronische Bremsen Verteilung , MSR (Motor Schlepp Regelung) ou régulation du couple moteur à la décélération , ESP, ESBS (Electronic Stability Brake System) ou contrôle de freinage en courbe , ASR, BAS (Brake Assist System) ou amplification du freinage en cas d'urgence, HAC (Hill-start Assist Control) assistance au démarrage en côte , EPS (Electronic Power Steering) direction assistée électrique , VGRS (Variable Gear Ratio Steering) système de démultiplication variable de la direction, Direction à assistance variable, BVA, suspension pilotée, gestion moteur Airbag, anti-démarrage, clim. régulée, détection du sous-gonflage des roues, aide au stationnement Allumage automatique des feux de croisement, essuie-vitre automatique, correction de site des feux (lampes au Xénon) Allumage automatique des feux de détresse en cas de forte décélération ou de choc (1ère mondiale sur la Peugeot 607) Régulation de vitesse avec radar anti-collision, navigation par satellite Et à venir : direction et freins entièrement électrique, guidage du véhicule par rapport aux « bandes blanches », … • ABS = AntiBlocage de Sécurité • REF = EBV = EBD = Répartiteur Electronique de Freinage • ASR = TRC = Antipatinage des roues (AntiSlin Regulation ou antiskid regulation) • AFU = BAS = Aide au Freinage d'Urgence • ESP = ESBS = VSC = Contrôle dynamique de stabilité (Electronic Stability Program) • HDi = Haute pression Diesel Injection • FAP = Filtre A Particules • AFIL = Alerte de Franchissement Involontaire de Ligne • GNV = Gaz Naturel de Ville • BMP6 = Boîte Manuelle Pilotée 6 vitesses
, REF (Répartiteur Electronique de Freinage) ou EBV (Elektronische Bremsen Verteilung , MSR (Motor Schlepp Regelung) ou régulation du couple moteur à la décélération , ESP, ESBS (Electronic Stability Brake System) ou contrôle de freinage en courbe , ASR, BAS (Brake Assist System) ou amplification du freinage en cas d urgence, HAC (Hill-start Assist Control) assistance au démarrage en côte , EPS (Electronic Power Steering) direction assistée électrique , VGRS (Variable Gear Ratio Steering) système de démultiplication variable de la direction, Direction à assistance variable, BVA, suspension pilotée, gestion moteur. Airbag, anti-démarrage, clim. régulée, détection du sous-gonflage des roues, aide au stationnement. Allumage automatique des feux de croisement, essuie-vitre automatique, correction de site des feux (lampes au Xénon) Allumage automatique des feux de détresse en cas de forte décélération ou de choc (1ère mondiale sur la Peugeot 607) Régulation de vitesse avec radar anti-collision, navigation par satellite. Et à venir : direction et freins entièrement électrique, guidage du véhicule par rapport aux « bandes blanches », … • ABS = AntiBlocage de Sécurité. • REF = EBV = EBD = Répartiteur Electronique de Freinage. • ASR = TRC = Antipatinage des roues (AntiSlin Regulation ou antiskid regulation) • AFU = BAS = Aide au Freinage d Urgence. • ESP = ESBS = VSC = Contrôle dynamique de stabilité (Electronic Stability Program) • HDi = Haute pression Diesel Injection. • FAP = Filtre A Particules. • AFIL = Alerte de Franchissement Involontaire de Ligne. • GNV = Gaz Naturel de Ville. • BMP6 = Boîte Manuelle Pilotée 6 vitesses.")
8
Limiter « l’inflation » des composants et du câblage
Deux réponses : L’intégration : regrouper plusieurs fonctions dans un seul boîtier (ex : gestion moteur et Boîtier de Servitude Intelligent de PSA) Gestion moteur : injection, allumage, dépollution, refroidissement moteur BSI : fermeture centralisée des portes, alarme, éclairage intérieur, anti-démarrage, essuyage des vitres, gestion des clignotants, … ESP (contrôle dynamique du véhicule) : ABS, REF, MSR, ASR, ESP Le multiplexage : faire circuler des informations d’origine différentes sur un seul canal de transmission. Equi. A Equipement A Equipement B Equipement C A1 A2 A3 A4 Equi. B B1 B2 B3 Equi. C C1 C2 Sur le canal de transmission A1 B1 C1 A2 B2 C2 A3 B3 A4 Temps
 Gestion moteur : injection, allumage, dépollution, refroidissement moteur. BSI : fermeture centralisée des portes, alarme, éclairage intérieur, anti-démarrage, essuyage des vitres, gestion des clignotants, … ESP (contrôle dynamique du véhicule) : ABS, REF, MSR, ASR, ESP. Le multiplexage : faire circuler des informations d’origine différentes sur un seul canal de transmission. Equi. A. Equipement A. Equipement B. Equipement C. A1. A2. A3. A4. Equi. B. B1. B2. B3. Equi. C. C1. C2. Sur le canal de. transmission. A1. B1. C1. A2. B2. C2. A3. B3. A4. Temps.")
9
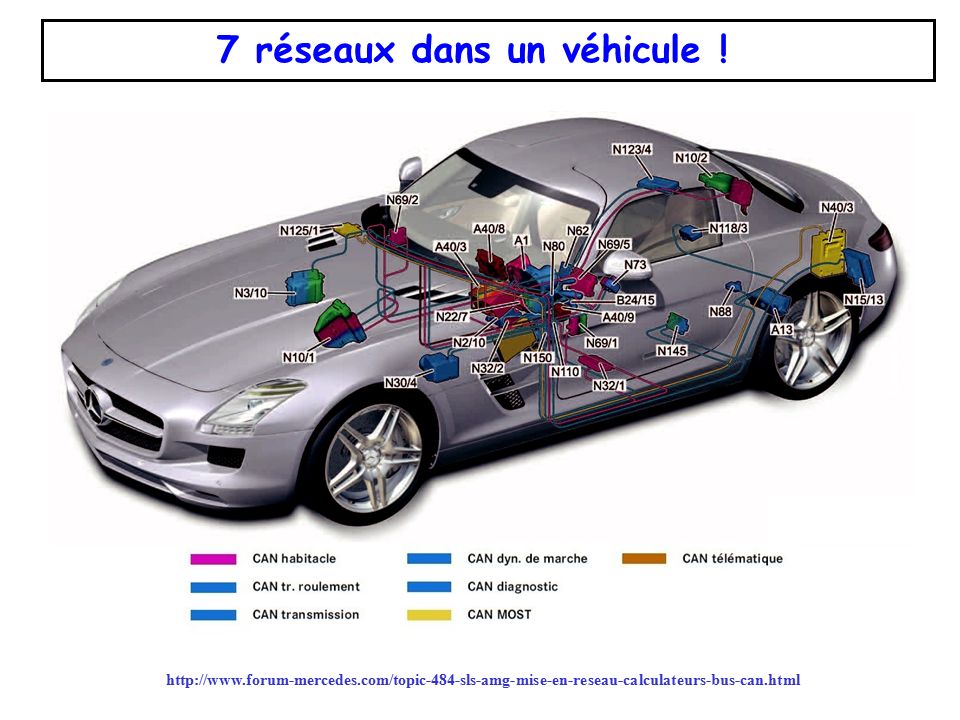
Evolution de l’architecture
Avant Maintenant

10
7 réseaux dans un véhicule !
11
Modèle OSI et CAN Principales propriétés du bus CAN
Modèle général à 3 couches Adaptation : les sous-couches Le CAN dans l’industrie

12
Principales propriétés du bus CAN
Hiérarchisation des messages Garantie des temps de latence Souplesse de configuration Réception de sources multiples avec synchro. temporelle Fonctionnement multimaître Détections et signalisations d’erreurs Retransmission des messages erronés dès que le bus est de nouveau disponible (au repos) Distinction des erreurs (temporaires ou de non fonctionnalité permanente au niveau d’un nœud) Déconnexion automatique des nœuds défectueux
 Distinction des erreurs (temporaires ou de non fonctionnalité. permanente au niveau d’un nœud) Déconnexion automatique des nœuds défectueux.")
13
Protocole CAN et modèle OSI
Modèle à 3 couches comme les réseaux de terrain. La couche 7 est vide (aucune spécification) adaptation possible par différents constructeurs (CANopen, DeviceNet, SDS). Le choix du support est laissé libre. N° de la couche Modèle OSI Protocole CAN 7 Application Spécifié par l’utilisateur 6 Présentation 5 Session 4 Transport 3 Réseau 2 Liaison Liaison : communication des données 1 Physique Physique (choix libre du support)
 adaptation possible par différents constructeurs (CANopen, DeviceNet, SDS). Le choix du support est laissé libre. N° de la couche. Modèle OSI. Protocole CAN. 7. Application. Spécifié par l’utilisateur. 6. Présentation. 5. Session. 4. Transport. 3. Réseau. 2. Liaison. Liaison : communication des données. 1. Physique. Physique (choix libre du support)")
14
Les sous-couches CAN Spécifications du protocole CAN
LLC (Logic Link Control) Filtrage des messages Notification des surcharges Procédure de recouvrement des erreurs MAC (Medium Access Control) Encapsulation/Décapsulation des données Codage de trame (Stuffing/Destuffing) Gestion de l’accès au support Détection d'erreur Signalisation d'erreur Spécifications du protocole CAN Couche 7 Application Couche 2 Liaison Couche 1 Physique Acquittement Sérialisalion/désérialiation PLS (Physical Signaling) Codage/décodage bit Bit timing Synchronisation PMA (Physical Medium Attachment) Caracteristiques Driver/Receiver MDI (Medium Dependent Interface) Connecteurs Les sous-couches LLC, MAC et PLS sont traitées par les circuits contrôleur de bus CAN (microcontrôleurs, circuits spécialisés).
 Filtrage des messages. Notification des surcharges. Procédure de recouvrement des erreurs. MAC (Medium Access Control) Encapsulation/Décapsulation des données. Codage de trame (Stuffing/Destuffing) Gestion de l’accès au support. Détection d erreur. Signalisation d erreur. Spécifications du protocole CAN. Couche 7. Application. Couche 2. Liaison. Couche 1. Physique. Acquittement. Sérialisalion/désérialiation. PLS (Physical Signaling) Codage/décodage bit. Bit timing. Synchronisation. PMA (Physical Medium Attachment) Caracteristiques Driver/Receiver. MDI (Medium Dependent Interface) Connecteurs. Les sous-couches LLC, MAC et PLS sont traitées par les circuits contrôleur de bus CAN (microcontrôleurs, circuits spécialisés).")
15
Le CAN dans l’industrie
Trois variations disponibles Siemens

16
Le réseau CAN Le bus physique Topologie et signaux
Caractéristiques de la couche physique Débit et distance franchissable Principe de diffusion de messages Codage des informations Le bit Timing Protocole CAN (4 types de trames) Trace d’une trame CAN à l’oscilloscope Réception en mode dégradé Résumé des principales caractéristiques
 Trace d’une trame CAN à l’oscilloscope. Réception en mode dégradé. Résumé des principales caractéristiques.")
17
Le réseau CAN – Le bus physique
Nœud i+1 Nœud i CAN H 60 CAN L Mesure de la résistance entre CAN L et CAN H possible 60 Si coupure de ligne : R > 60 ohms ( 120 ) Si lignes en court-circuit : R < 60 ohms ( 0 ) Les 2 capacités de 100 pF(optionnelles) absorbent les éventuels pics de tension à l’aide des 4 résistances (60 ) 17
 Si lignes en court-circuit : R < 60 ohms ( 0 ) Les 2 capacités de 100 pF(optionnelles) absorbent les éventuels pics de tension à l’aide des 4 résistances (60 ) 17.")
18
Le réseau CAN – Topologie et signaux
Deux versions normalisées du bus CAN ISO CAN Low Speed et ISO CAN High Speed (débit<125 kbit/s) (125 kbit/s à 1Mbit/s) 1 logique logique logique 1 logique logique logique
 (125 kbit/s à 1Mbit/s) 1 logique 0 logique 1 logique. 1 logique 0 logique 1 logique.")
19
Le Réseau CAN – Couche physique
Physiquement le bus est une paire torsadée de deux fils électriques : CAN L (low) et CAN H (High) Les états logiques (0 ou 1) sont codés par différence de potentiel entre les deux fils : immunité importante au bruit Caractéristiques électriques, nombres de noeuds et débits 0 V
 et CAN H (High) Les états logiques (0 ou 1) sont codés par différence de potentiel entre les deux fils : immunité importante au bruit. Caractéristiques électriques, nombres de noeuds et débits. 0 V.")
20
Le réseau CAN – Débit et distance franchissable
La distance franchissable est liée : - au débit (ou durée d’un bit), - à la charge capacitive du bus. Les configurations recommandées sont les suivantes :
, - à la charge capacitive du bus. Les configurations recommandées sont les suivantes :")
21
Le réseau CAN – Diffusion de messages
Le concept de communication du bus CAN est celui de la diffusion d’information (broadcast). Chaque station connectée au réseau écoute les trames transmises par les stations émettrices. Ensuite chaque nœud décide quoi faire du message, s’il doit y répondre ou non, s’il doit agir ou non, etc… Le protocole CAN autorise différents nœuds à accéder simultanément au bus par un procédé rapide et fiable d’arbitrage qui détermine le nœud qui émettra en premier. L’accès au bus est donc aléatoire car un nœud peut émettre à n’importe quel moment. Mais cet accès se fait par priorité ; cette méthode est appelée CSMA CD/AMP (Carrier Sense Multiple Acces with Collision Detection and Arbitration Message Priority).
. Chaque station connectée au réseau écoute les trames transmises par les stations émettrices. Ensuite chaque nœud décide quoi faire du message, s’il doit y répondre ou non, s’il doit agir ou non, etc… Le protocole CAN autorise différents nœuds à accéder simultanément au bus par un procédé rapide et fiable d’arbitrage qui détermine le nœud qui émettra en premier. L’accès au bus est donc aléatoire car un nœud peut émettre à n’importe quel moment. Mais cet accès se fait par priorité ; cette méthode est appelée CSMA CD/AMP (Carrier Sense Multiple Acces with Collision Detection and Arbitration Message Priority).")
22
Le réseau CAN – Connexion des noeuds
Le mode de connexion en « ET câblé » autorise l’émission simultanée de niveaux logiques différents (le 0L écrase le 1L) Bus CAN Résultat équivalent à une porte ET si on considère : 0 pour un bit dominant, 1 pour un bit récessif. Nœud A Nœud B Bit récessif Bit dominant Nœud A Bit récessif Bit dominant Bit dominant Nœud B Bit récessif Bit dominant Bus CAN Bit dominant
 Bus CAN. Résultat équivalent à une porte ET si on considère : 0 pour un bit dominant, 1 pour un bit récessif. Nœud A. Nœud B. Bit récessif. Bit dominant. Nœud A. Bit récessif. Bit dominant. Bit dominant. Nœud B. Bit récessif. Bit dominant. Bus CAN. Bit dominant.")
23
Exemple de tranceiver CAN : MCP2551 (Microchip)
Le réseau CAN – Connexion des noeuds Exemple de tranceiver CAN : MCP2551 (Microchip)
")
24
Le réseau CAN – Connexion des noeuds
Isolation galvanique : certains systèmes électroniques sensibles doivent être protégés des éventuels problèmes électriques véhiculés par le bus de communication. Exemple d’isolation par opto-coupleur

25
Le réseau CAN – Le codage des informations
La transmission du bus CAN est synchrone : la re-synchronisation régulièrement de l’horloge du récepteur sur celle de l’émetteur utilise le principe du bourrage de bit inverse : méthode de bit stuffing Après 5 bits de même niveau, un bit (sans signification) de niveau inverse est ajouté Le récepteur reconnaît ces bits de bourrage , cale son horloge, les supprime, et reconstitue le message initial La vitesse de transmission CAN est exprimée en bits/s. Le débit réel des infos ne doit pas tenir compte de ces bits rajoutés. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 S Trame à l'émission avant la mise en place des bits de stuffing Trame avec bits de stuffing (S)
 de niveau inverse est ajouté. Le récepteur reconnaît ces bits de bourrage , cale son horloge, les supprime, et reconstitue le message initial. La vitesse de transmission CAN est exprimée en bits/s. Le débit réel des infos ne doit pas tenir compte de ces bits rajoutés S. Trame à l émission avant la mise en place des bits de stuffing. Trame avec bits de stuffing (S)")
26
Le réseau CAN – Le bit timing
On définit la plus petite base de temps reconnue sur un bus CAN comme étant le Time Quantum. Cette base de temps est une fraction de l’horloge de l’oscillateur du bus. Un bit dure entre 8 et 25 quantum Exemple de bit timing : lecture d’un bit (ISO11898 : High Speed CAN 250 Kbps) 1 bit correspond à 32 coup d’horloge La lecture du bit devra être faite au 20éme coup d’horloge Horloge prédivisée
 1 bit correspond à 32 coup d’horloge. La lecture du bit devra être faite au 20éme. coup d’horloge. Horloge prédivisée.")
27
Le réseau CAN – Arbitrage d’une trame
Il peut arriver que 2 nœuds (ou plus) émettent simultanément une trame sur le bus. Au début d’émission pas de conflit, car le champ de début de trame est identique pour tous les boîtiers. Mais ensuite il va falloir déterminer laquelle des trames est prioritaire sur les autres, elle sera la seule transmise. Arbitrage bit à bit (niveaux Récessif / Dominant) bit à 0 = Dominant bit à 1 = Récessif Un niveau Dominant l'emporte toujours sur un niveau Récessif Equipement A Equipement B Equipement C A1, A2, A3, A4 ; B1, B2, B3; C1, C2 A C B Début Com. Informations de A Contrôle Fin Ack Informations de B Informations de C
 émettent simultanément une trame sur le bus. Au début d’émission pas de conflit, car le champ de début de trame est identique pour tous les boîtiers. Mais ensuite il va falloir déterminer laquelle des trames est prioritaire sur les autres, elle sera la seule transmise. Arbitrage bit à bit (niveaux Récessif / Dominant) bit à 0 = Dominant. bit à 1 = Récessif. Un niveau Dominant l emporte toujours sur un niveau Récessif. Equipement A. Equipement B. Equipement C. A1, A2, A3, A4 ; B1, B2, B3; C1, C2. A. C. B. Début Com. Informations de A. Contrôle. Fin. Ack Informations de B Informations de C.")
28
Le réseau CAN – Arbitrage d’une trame
Chaque émetteur compare le bit qu’il reçoit avec celui qu’il émet ; tant que ces 2 bits sont identiques les 2 transmissions continuent Dès que 2 bits diffèrent, le boîtier ayant émis un bit à l’état récessif cesse d’émettre Sur le bus A C B Début Com. Informations de A Contrôle Fin Ack Informations de B Perte d'arbitrage de la trame de A Informations de C

29
Le protocole CAN – Arbitrage d’une trame
Début Com. Informations de B Contrôle Fin Ack Sur le bus C Informations de C Perte d'arbitrage de la trame de C Le nœud B poursuit l’émission de la trame, les nœuds A et C attendent la libération du bus pour transmettre de nouveau. Sur le bus CAN, la priorité est déterminée sur le seul champ d’identification (y compris le bit RTR)
")
30
Le protocole CAN – Trame d’informations
Une trame d’informations se décompose en 7 champs (bit RTR=0) : - début de trame (1 bit) start off frame (SOF) - champ d'arbitrage (12 bits) arbitration field - champ de commande (6 bits) control field - champ de données (0 à 64 bits) data field - champ de CRC (16 bits) CRC sequence - champ d'acquittement (2 bits) ACKnowledgement field - fin de trame (7 bits) end of frame (EOF) Un champ supplémentaire d’intermission (3 bits) ou « zone interframe » sépare 2 trames consécutives.
 : - début de trame (1 bit) start off frame (SOF) - champ d arbitrage (12 bits) arbitration field. - champ de commande (6 bits) control field. - champ de données (0 à 64 bits) data field. - champ de CRC (16 bits) CRC sequence. - champ d acquittement (2 bits) ACKnowledgement field. - fin de trame (7 bits) end of frame (EOF) Un champ supplémentaire d’intermission (3 bits) ou « zone interframe » sépare 2 trames consécutives.")
31
Le protocole CAN – Trame d’informations
La trame sur le CAN se répartie en 7 champs : Début SOF (Start Of Frame) La trame commence toujours par 1 bit dominant (bit à 0), la ligne étant précédemment au repos (1 logique) Ce bit ne sert qu’à synchroniser les horloges internes des récepteurs sur celle de l’émetteur : sorte de bit de start Zone d’arbitrage Début Identificateur Com. Informations Contrôle Fin Ack Début Identificateur Com. Informations Contrôle Fin Ack Champ composé de 12 bits : Les 11 premiers indiquent l’identité du contenu du message, et servent également à l’arbitrage (gestion des priorités) Le dernier bit (RTR) permet de coder la nature du message : trame de données (ex : régime moteur) ou trame de requête (demande de T° eau) bit à 0 (dominant) : trame de données bit à 1 (récessif) : trame de requête
 La trame commence toujours par 1 bit dominant (bit à 0), la ligne étant précédemment au repos (1 logique) Ce bit ne sert qu’à synchroniser les horloges internes des récepteurs sur celle de l’émetteur : sorte de bit de start. Zone d’arbitrage. Début. Identificateur. Com. Informations. Contrôle. Fin. Ack. Début. Identificateur. Com. Informations. Contrôle. Fin. Ack. Champ composé de 12 bits : Les 11 premiers indiquent l’identité du contenu du message, et servent également à l’arbitrage (gestion des priorités) Le dernier bit (RTR) permet de coder la nature du message : trame de données (ex : régime moteur) ou trame de requête (demande de T° eau) bit à 0 (dominant) : trame de données. bit à 1 (récessif) : trame de requête.")
32
Le protocole CAN – Trame d’informations
Début Identificateur Com. Informations Contrôle Fin Ack Champ de commande constitué de 6 bits : Les 2 premiers serviront pour une éventuelle évolution du protocole (bits de réserve nommés R1 et R0) Les 4 derniers permettent de coder le nombre d’octets du champ de données (de 0 à 8 au maximum)
 Les 4 derniers permettent de coder le. nombre d’octets du champ de données. (de 0 à 8 au maximum)")
33
Le protocole CAN – Trame d’informations
Début Identificateur Com. Informations Contrôle Ack Fin Ce champ contient de 0 à 8 octets de données (64 bits maxi)
")
34
Le protocole CAN – Trame d’informations
Début Identificateur Com. Informations Contrôle Ack Fin Ce champ de vérification des données est composé de 2 parties : Code de vérification des données, CRC sur 15 bits avec G(x)=0xC599 Le récepteur compare le CRC calculé en réception avec celui de l’émetteur ; si différence, pas d’acquittement Délimiteur de CRC : marque la fin de la vérification, 1 bit toujours à l’état 1 Ce contrôle est effectué par tous les boîtiers du réseau. Le codage par bit stuffing est désactivé à partir de cet instant
=0xC599 Le récepteur compare le CRC calculé en réception avec celui de l’émetteur ; si différence, pas d’acquittement. Délimiteur de CRC : marque la fin de la vérification, 1 bit toujours à l’état 1. Ce contrôle est effectué par tous les boîtiers du réseau. Le codage par bit stuffing est désactivé à partir de cet instant.")
35
Le protocole CAN – Trame d’informations
Début Identificateur Com. Informations Contrôle Fin Ack Ce champ d’acquittement est composé de 2 bits : un nœud en train de transmettre envoie un bit récessif pour le ACK Slot. un nœud ayant reçu correctement un message en informe le nœud émetteur en envoyant un bit dominant pendant le ACK Slot : il acquitte le message si le calcul du CRC est correct. En cas d’erreur, ce bit est laissé à l’état haut Un bit délimiteur d’acquittement, toujours à l’état haut (1) Tous les boîtiers du réseau doivent acquitter, même si la trame ne les concerne pas (perte de temps possible)
 Tous les boîtiers du réseau doivent acquitter, même si la trame ne les concerne pas (perte de temps possible)")
36
Le protocole CAN – Trame d’informations
Début Identificateur Com. Informations Contrôle Fin Ack Champ de fin de trame : suite de 7 bits à l’état Remarque : 3 bits à l’état 1 séparent obligatoirement 2 trames consécutives (Interframe zone) 108 bits (sans les stuffing) sont nécessaires pour 64 bits de données
 108 bits (sans les stuffing) sont nécessaires pour 64 bits de données.")
37
Le protocole CAN – Trame de requête
Une trame de requête comporte les mêmes champs qu’une trame d’informations mais avec le bit RTR = 1 Comparons 2 trames avec le même identificateur, l’une d’informations et l’autre de requête : la trame d’informations est prioritaire sur la trame de requête

38
Le protocole CAN – Trace CAN à l’oscilloscope
Le protocole CAN – Trame logique et exploitation

39
Le protocole CAN – Réception en mode dégradé
Dans les cas de pannes suivants : Fil Can L ou Can H à la masse Fil Can L ou Can H à +BAT (+12volts) Fil Can L ou Can H coupé Court-circuit entre les fils Can L et Can H Calculateur avec terminaison de ligne absent La communication sur le réseau CAN n’est plus possible
 Fil Can L ou Can H coupé. Court-circuit entre les fils Can L et Can H. Calculateur avec terminaison de ligne absent. La communication sur le réseau CAN n’est plus possible.")
40
Le protocole CAN – Evolution : CAN LS/FT (Low Speed / Fault Tolerance)
Les erreurs : CAN HS le réseau ne supporte absolument rien CAN LS Détection des défauts de ligne : (coupure, masse, +alim, court-circuit entre CAN H et CANL). Mode dégradé : fonctionnement sur un seul fil. Pour un bon diagnostic, il doit toujours y avoir de la communication sur le réseau.
. Mode dégradé : fonctionnement sur un seul fil. Pour un bon diagnostic, il doit toujours y. avoir de la communication sur le réseau.")
41
http://www. technologuepro
Présentations similaires
















>")


