Télécharger la présentation
1
PSY 2055. Psychologie de la perception. Perception du mouvement. Frédéric Gosselin

3
Cinématogrammes à points aléatoires Le mouvement lui-même peut servir à segmenter un objet.

4
Bêta

8
Pour une distance et une luminance données : –Et avec un IIS de moins de 30 ms environ (> environ 33 flash/s) : deux flashs simultanés –Et avec un IIS entre 30 et 60 ms environ (environ 17 à 33 flash/s) : mouvement “désincarné”, sans point en mouvement (phi) –Et avec un IIS entre 60 et 300 ms environ (environ 3 à 17 flash/s) : bêta –Et avec un IIS plus grand que 300 ms environ (< environ 3 flash/s) : succession de deux flashs La luminance et la distance entre les deux points sont aussi déterminants (loi de Korte) : –Une augmentation de la distance exige soit une augmentation de la luminance, soit des IIS plus longs http://www2.psych.purdue.edu/Magniphi/ARVODemo.html
 : deux flashs simultanés –Et avec un IIS entre 30 et 60 ms environ (environ 17 à 33 flash/s) : mouvement désincarné , sans point en mouvement (phi) –Et avec un IIS entre 60 et 300 ms environ (environ 3 à 17 flash/s) : bêta –Et avec un IIS plus grand que 300 ms environ (< environ 3 flash/s) : succession de deux flashs La luminance et la distance entre les deux points sont aussi déterminants (loi de Korte) : –Une augmentation de la distance exige soit une augmentation de la luminance, soit des IIS plus longs")
9
Le cinématoscope Avec un IIS entre 60 et 300 ms environ (soit environ 3 à 17 flash/s) : bêta Les images d’un film sont prises avec une fréquence de 24 Hz (ce qui permet 12 flash/s) À cette fréquence de présentation on voit la lumière s’éteindre et s’allumer (stroboscope) –En fait, il s’agit d’une fréquence idéale pour induire des épisodes épileptiques (~10 flash/s) À environ 70 Hz, on perçoit de la continuité dans l’éclairage (flicker fusion ~ 30 flash/s) –Au cinéma, chaque image d’un film est donc présentée trois fois pour atteindre 72 Hz! http://www.youtube.com/watch?v=k7zzEBPU2vM

10
Le cinématoscope x 3 Succesion d’images différentes à un rythme de 24 Hz (IIS = 41,6 ms) pour obtenir du mouvement bêta. Succesion d’images à un rythme de 72 Hz (IIS = 13,9 ms) pour dépasser la fréquence critique de fusion (et éviter un effet stroboscope).
 pour dépasser la fréquence critique de fusion (et éviter un effet stroboscope)..")
11
Et si on compliquait les choses un peu…

15
moment 1 moment 2

16
Problème de ciné-correspondance, 1 moment 1 moment 2

17
Problème de ciné-correspondance, 1 moment 1 moment 2 Solution des plus proches voisins.

18
Problème de ciné-correspondance (contrainte du plus proche voisin)
")
19
Kolers (1971)
")
22
Plus proches voisins vs. forme et couleur

23
Mouvement apparent de transformation (Hikosaka, Miyauchi & Shimojo, 1993)
")
24
Contrainte de similarité de forme et de couleur.

25
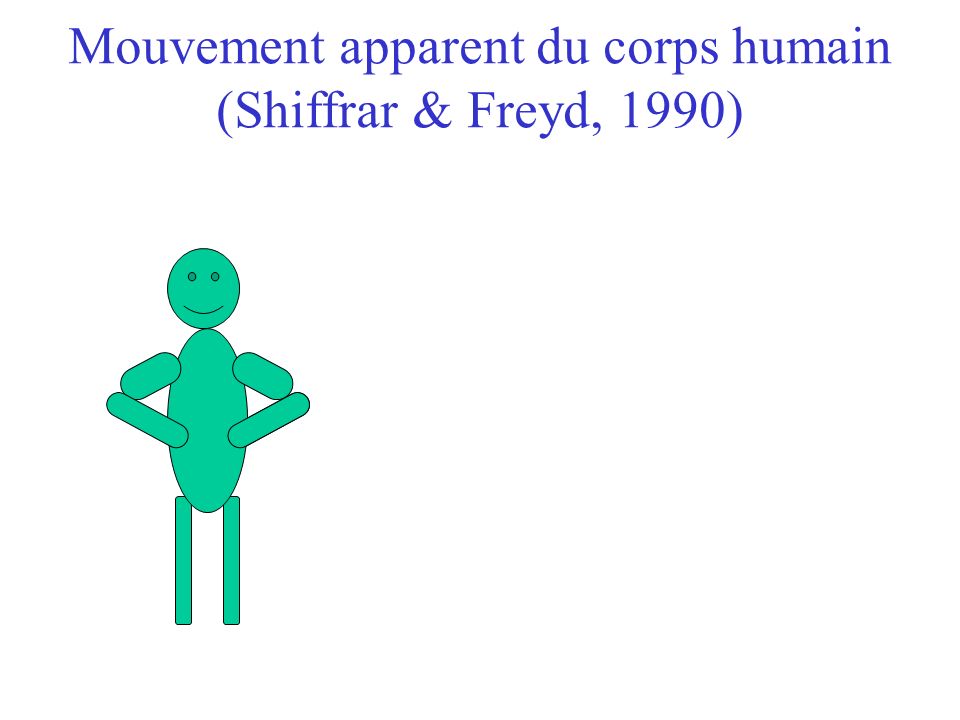
Mouvement apparent du corps humain (Shiffrar & Freyd, 1990)
")
27
Contrainte dépendante de notre connaissance du corps humain.

28
Mouvement apparent du corps humain (Shiffrar & Freyd, 1990)
")
31
Cellule ganglion- naire M Cellule ganglion- naire P Magno LGN Parvo LGNV1 V2V3 V2 V5 (MT) Pariétal V4 IT Couleur Forme Mouvement Diagramme simplifié des deux systèmes et de leur origine Système ventral (“what”, temporal) Système dorsal (“where”, pariétal) MSTSTS
 Pariétal V4 IT Couleur Forme Mouvement Diagramme simplifié des deux systèmes et de leur origine Système ventral ( what , temporal) Système dorsal ( where , pariétal) MSTSTS")
32
10-20% des cellules complexes dans V1 répondent sélectivement au mouvement (Ringach, Sapiro et Shapley, 1997)
")
33
Effet consécutif de la “chute” (The Falls of Foyers; Robert Adams, 1834)
")
34
Les CRs de deux cellules simples… De même position et fréquence, mais de phases différentes.

35
Une cellule complexe fabriquée à partir de cellules simples, etc. 1 2 Réseau de neurones de Reichardt Attention : oubliez la description du modèle de Reichardt p. 277 du Goldstein

36
Une cellule complexe fabriquée à partir de cellules simples 1 2 Détecteur de Reichardt Attention : oubliez la description du modèle de Reichardt p. 277 du Goldstein http://neurovision.berkeley.edu/Demonstrations/matthew/reichardt.html

37
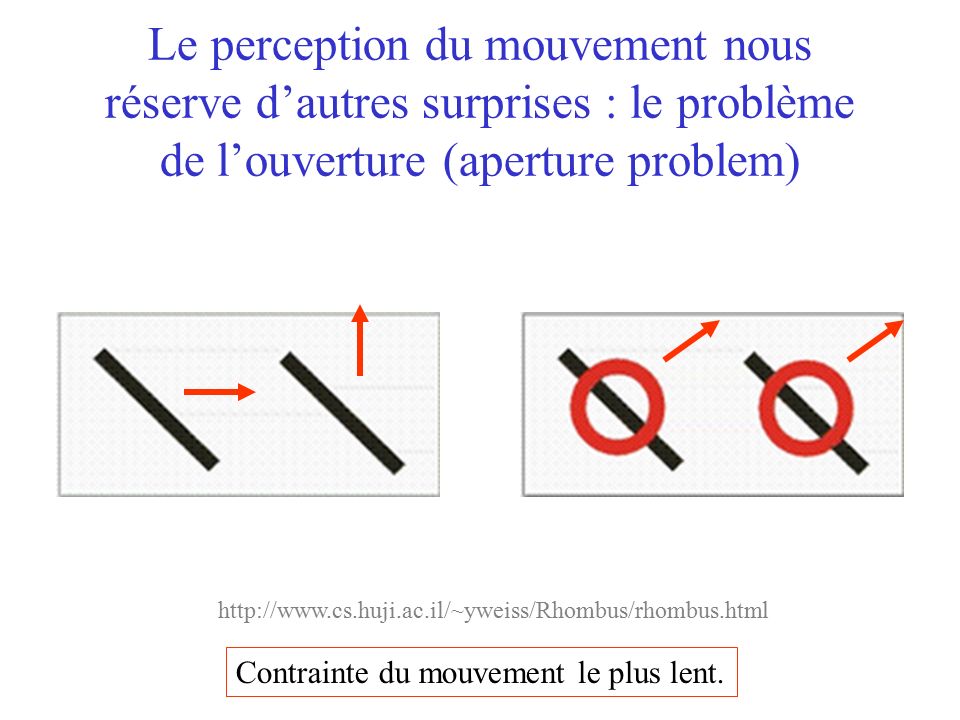
Le perception du mouvement nous réserve d’autres surprises : le problème de l’ouverture (aperture problem) Contrainte du mouvement le plus lent.
 Contrainte du mouvement le plus lent.")
38
Problème de l’ouverture

39
Le perception du mouvement nous réserve d’autres surprises : le problème de l’ouverture (aperture problem) Contrainte du mouvement le plus lent. http://www.cs.huji.ac.il/~yweiss/Rhombus/rhombus.html
40
Cas particulier du problème de la ciné-correspondance Localement il est donc difficile de décider laquelle des deux possibilités est la bonne.

41
Une conséquence du problème de l’ouverture (Pinna & Brelstaff, 2000)
")
42
Une conséquence du problème de l’ouverture

43
Champ récepteur La capacité des cellules des aires V1 et V2 à signaler la direction du mouvement est donc limitée.

44
Le problème de l’aperture est résolu par une intégration de l’information provenant de multiples neurones des aires visuelles primaires par l’aire MT.

45
Le réseau en mouvement Contrainte d’une surface unique. On retrouve des neurones répondants à des mouvements de réseaux dans V5 (MT).
..")
46
MT (V5) : un exemple de modularité dans le système dorsal Newsome et Paré (1988) ont montré que les singes pouvaient détecter la direction d’un mouvement possédant une cohérence de 1% ou 2%. La destruction de MT fait grimper ce seuil à 10% ou 20% de cohérence. 30% de cohérence5% de cohérence100% de cohérence

47
Agnosie visuelle du mouvement (akinétopsie) Le patient L.M. : –N’a pas de problème de perception des attributs des objets –N’a pas de problème de perception des objets (=> pas une agnosie “aperceptive”) –Est capable de nommer les objets (=> pas une agnosie associative) Mais n’arrive pas à voir le mouvement –P. ex. Quand elle verse de l’eau dans un verre, elle ne voit pas le niveau monter. Subitement il y a plus d’eau qu’il y en avait. Lésion bilatérale à l’aire V5 (MT)
 –Est capable de nommer les objets (=> pas une agnosie associative) Mais n’arrive pas à voir le mouvement –P. ex. Quand elle verse de l’eau dans un verre, elle ne voit pas le niveau monter. Subitement il y a plus d’eau qu’il y en avait. Lésion bilatérale à l’aire V5 (MT).")
48
Effet consécutif d’un mouvement en spirale (dans MST)
")
49
Mouvement biologique Oram et Perrett (1994) ont montré que des neurones de la région supérieure temporale (STS) répondaient à ce genre de stimuli.
 ont montré que des neurones de la région supérieure temporale (STS) répondaient à ce genre de stimuli.")
50
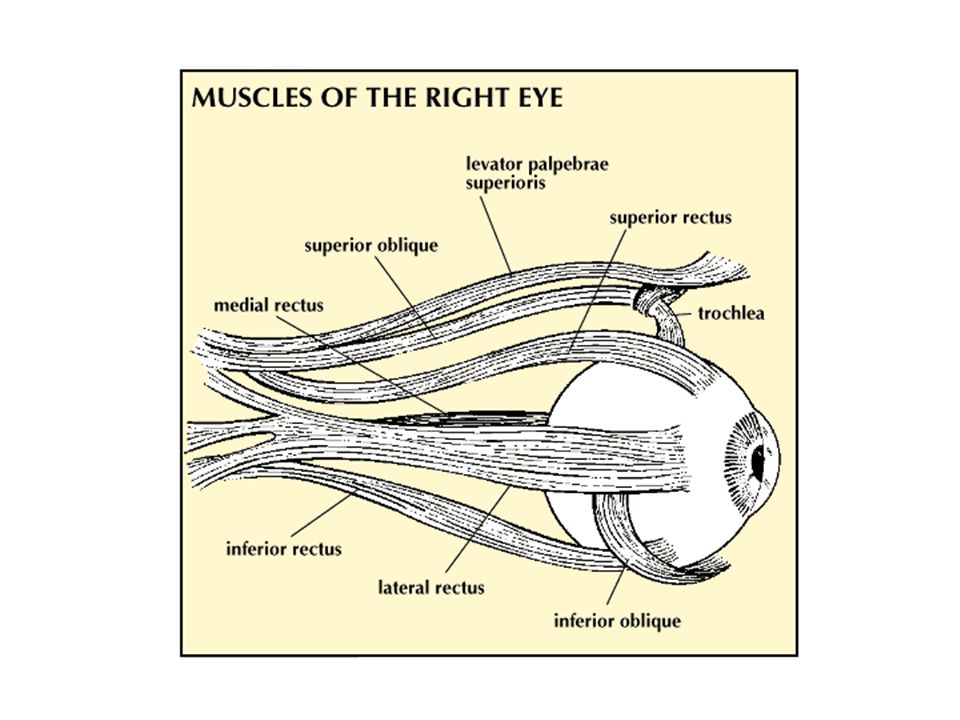
Muscles extraoculaires Rectus supérieur Rectus inférieur Rectus médian Rectus latéral

52
Les mouvements oculaires Les saccades –Mouvements des yeux pouvant atteindre 800 deg d’angle visuel par s. Servent à explorer l’environnement visuel. S’accompagne d’une suppression de la vision magno. Les micro-saccades (trémeurs) –Petits mouvements (1 à 2 min d’angle visuel) aléatoires des yeux. Si on éliminait nos micro-saccades, on ne verrait plus! La poursuite douce (smooth pursuit) –Mouvements continus des yeux pouvant atteindre 30 deg d’angle visuel par s. Servent à immobiliser un objet en mouvement par rapport à votre rétine. Nystagmus opto-kinétique (OKN) –Quand vous regardez par la fenêtre d’une voiture en marche, alternativement, vos yeux suivent le paysage de manière “douce” puis font une saccade qui les ramène au centre de votre globe oculaire.
 –Petits mouvements (1 à 2 min d’angle visuel) aléatoires des yeux. Si on éliminait nos micro-saccades, on ne verrait plus. La poursuite douce (smooth pursuit) –Mouvements continus des yeux pouvant atteindre 30 deg d’angle visuel par s. Servent à immobiliser un objet en mouvement par rapport à votre rétine. Nystagmus opto-kinétique (OKN) –Quand vous regardez par la fenêtre d’une voiture en marche, alternativement, vos yeux suivent le paysage de manière douce puis font une saccade qui les ramène au centre de votre globe oculaire..")
53
Modèle centrifuge (encore Helmholtz!) Perception de mouvement =+=+ {A = 0 et B = } ou {A = et B = 0} : Perception de mouvement {A = 0 et B = 0} ou {A = et B = } : Pas de perception de mouvement Il y a perception de mouvement si la somme du mouvement de l’oeil et d’un objet par rapport à l’oeil est différente de zéro A B
 Perception de mouvement =+=+ {A = 0 et B = } ou {A = et B = 0} : Perception de mouvement {A = 0 et B = 0} ou {A = et B = } : Pas de perception de mouvement Il y a perception de mouvement si la somme du mouvement de l’oeil et d’un objet par rapport à l’oeil est différente de zéro A B")
54
Modèle centripète Perception de mouvement =+=+ A B

55
Le modèle centrifuge Il y a perception de mouvement si la somme du mouvement de l’oeil et d’un objet par rapport à l’oeil est différente de zéro. P. ex. : –un objet est en mouvement par rapport à l’oeil et l’oeil est immobile—ou le cerveau pense que l’oeil est immobile (des neurones répondant seulement à ce type de mouvement ont été découvert dans V3 [Galletti, Battaglini et Fattori, 1990]): Mouvement réel
: Mouvement réel.")
56
Les détecteurs de “real-motion” de V3 (Galletti, Battaglini & Fattori, 1990) On peut produire un mouvement d’un objet donné de deux manières sur la rétine : –En bougeant l’objet par rapport à la rétine (real motion) –En bougeant la rétine par rapport à l’objet Des neurones de V3 répondent spécifiquement à ce “real motion” « Real motion »
 On peut produire un mouvement d’un objet donné de deux manières sur la rétine : –En bougeant l’objet par rapport à la rétine (real motion) –En bougeant la rétine par rapport à l’objet Des neurones de V3 répondent spécifiquement à ce real motion « Real motion »")
57
Le modèle centrifuge Il y a perception de mouvement si la somme du mouvement de l’oeil et d’un objet par rapport à l’oeil est différente de zéro. P. ex. : –un objet est en mouvement par rapport à l’oeil et l’oeil est immobile—ou le cerveau pense que l’oeil est immobile (des neurones répondant seulement à ce type de mouvement ont été découvert dans V3 [Galletti, Battaglini et Fattori, 1990]): Mouvement réel Béta Pressions mécaniques sur l’oeil (pour le bouger) –l’oeil est en mouvement et un objet est immobile par rapport à l’oeil : Mouvement d’une balle de tennis suivit des yeux Mouvement d’une image consécutive (ou d’un corps flottant) Sigma Pressions mécaniques sur l’oeil (pour l’immobiliser) Attention, dépend de l’explication utilisée
: Mouvement réel Béta Pressions mécaniques sur l’oeil (pour le bouger) –l’oeil est en mouvement et un objet est immobile par rapport à l’oeil : Mouvement d’une balle de tennis suivit des yeux Mouvement d’une image consécutive (ou d’un corps flottant) Sigma Pressions mécaniques sur l’oeil (pour l’immobiliser) Attention, dépend de l’explication utilisée.")
58
Un objet est en mouvement 1)On ne le suit pas des yeux -Œil est immobile, Image rétinienne est en mouvement 2)On le suit des yeux (ex. balle de tennis) -Œil est en mouvement, Image rétinienne est immobile (ex. on garde l’objet sur la fovéa) =+=+ 2) A = ; B = 0 : Mouvement A B 1) A = 0 ; B = : Mouvement
 -Œil est en mouvement, Image rétinienne est immobile (ex. on garde l’objet sur la fovéa) =+=+ 2) A = ; B = 0 : Mouvement A B 1) A = 0 ; B = : Mouvement.")
59
Pression mécanique sur l’oeil 1)poussée sur l’œil tout en essayant de le bouger et l’œil demeure immobile (!) : Goldstein p. 281 - œil est immobile parce que commande motrice contrebalance exactement la force de la poussée =+=+ 2) poussée sur l’œil et l’œil bouge (beaucoup plus intuitif) - œil bouge parce qu’absence de commande motrice contraire (absence de commande motrice = pour le système nerveux l’œil est « immobile ») 1) A = ; B = 0 : Mouvement A B 2) A = 0 ; B = : Mouvement
 poussée sur l’œil et l’œil bouge (beaucoup plus intuitif) - œil bouge parce qu’absence de commande motrice contraire (absence de commande motrice = pour le système nerveux l’œil est « immobile ») 1) A = ; B = 0 : Mouvement A B 2) A = 0 ; B = : Mouvement.")
60
Image consécutive 1)Image consécutive est par définition immobile sur la rétine (zone de la rétine « souffrant » de « fatigue cellulaire ») parallèlement, on bouge l’oeil =+=+ 1) A = ; B = 0 : Mouvement A B
Image consécutive est par définition immobile sur la rétine (zone de la rétine « souffrant » de « fatigue cellulaire ») parallèlement, on bouge l’oeil =+=+ 1) A = ; B = 0 : Mouvement A B")
63
Deux objets bougent différemment On suit l’objet 1 des yeux ; qu’arrive-t-il à l’objet 2? -Œil est en mouvement et image rétinienne de l’objet 2 est en mouvement =+=+ A B A = ; B = : Mouvement

64
Cellule ganglion- naire M Cellule ganglion- naire P Magno LGN Parvo LGNV1 V2V3 V2 V5 (MT) Pariétal V4 IT Couleur Forme Mouvement Système ventral (“what”, temporal) Système dorsal (“where”, pariétal) MT : 1)Contrainte de surface unique 2)Détection de mouvement cohérent 3)Akinétopsie chez LM MST MST : Mouvement en spirale V3 : Détecteur de « Real-Motion » Général : 1)Mouvements oculaires 2)Modèle centrifuge (toutes les possibilités) http://www.biomotionlab.ca/Demos/BMLwalker.html STS STS : Mouvement biologique * En somme
 Pariétal V4 IT Couleur Forme Mouvement Système ventral ( what , temporal) Système dorsal ( where , pariétal) MT : 1)Contrainte de surface unique 2)Détection de mouvement cohérent 3)Akinétopsie chez LM MST MST : Mouvement en spirale V3 : Détecteur de « Real-Motion » Général : 1)Mouvements oculaires 2)Modèle centrifuge (toutes les possibilités) STS STS : Mouvement biologique * En somme")























. L’œil doit donc constamment bouger afin que.>")

: Vision développer la connaissance anatomique>")




