Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Communication Industrielle
2011/2012 Communication Industrielle

2
Le besoin de communiquer

3
TRANSMISSION D'UN MESSAGE
PRINCIPE Analogie avec la communication humaine : La communication humaine met en oeuvre une chaîne d'organes permettant d'envoyer des messages à un interlocuteur. TRANSMISSION D'UN MESSAGE

4
TRANSMISSION D'UN MESSAGE
Tout comme la communication humaine, la communication entre systèmes s'effectue à travers une chaîne d'éléments . TRANSMISSION D'UN MESSAGE Bus : il s'agit d'une série de fils électriques par lesquels sont véhiculées, sous forme numérique (des mots binaires), les informations à transmettre.
, les informations à transmettre.")
5
en PARALLELE ou en SERIE .
CODAGE DE L'INFORMATION : La transmission de données consiste à coder des informations de façon à pouvoir être véhiculées sur un support adapté. Dans le cas des transmissions numériques, le codage se fait par des bits (0 ou 1 logique). Chaque niveau logique correspondant à un niveau de tension ou courant. Les différentes normes spécifient les niveaux du 0 et du 1 logique ( niveau de tension, de courant, de fréquence, de front ). La transmission des bits de données peut être véhiculée de deux façons différentes : en PARALLELE ou en SERIE .
. Chaque niveau logique correspondant à un niveau de tension ou courant. Les différentes normes spécifient les niveaux du 0 et du 1 logique ( niveau de tension, de courant, de fréquence, de front ). La transmission des bits de données peut être véhiculée de deux façons différentes : en PARALLELE ou en SERIE .")
6
Transmission parallèle :
Les données en sortie des organes de traitement de I'information sont présentées généralement sous forme de mots de n bits. La transmission parallèle consiste a émettre simultanément ces n bits d'information et nécessite par conséquent une ligne de transmission de n fils appelée bus, associée à des fiIs de contrôle et de commande . TRANSMISSION D'UN MESSAGE : Ce type de liaison est utilisé pour transmettre des données sur de courtes distances (quelques mètres)
")
7
Transmission série asynchrone :
En environnement industriel on préfère Utiliser la transmission Série asynchrone plus simple à mettre en oeuvre et moins coûteuse. La ligne ne comporte qu'un fil; les éléments binaires d'informations (bits) d'un mot ou caractère sont alors envoyés successivement les uns après les autre (sérialisation) au rythme d'un signal d'horloge. Le récepteur effectue I'opération inverse: transformation Série/parallèle à partir de son horloge ayant la même fréquence que celle de I'émetteur. TRANSMISSION D'UN MESSAGE :
 d un mot ou caractère sont alors envoyés successivement les uns après les autre (sérialisation) au rythme d un signal d horloge. Le récepteur effectue I opération inverse: transformation Série/parallèle à partir de son horloge ayant la même fréquence que celle de I émetteur. TRANSMISSION D UN MESSAGE :")
8
LE MODE DE TRANSMISSION DES DONNEES :
Le mode de transmission permet de définir si la communication se fait entre deux ( liaison point à point ) ou plusieurs interlocuteurs ( >2 : liaison multipoint) et sous quelle forme : SIMPLEX : Dans ce mode, l'émetteur émet des ordres, le récepteur les exécute uniquement. Le récepteur ne peut pas renvoyer un message .
 ou plusieurs interlocuteurs ( >2 : liaison multipoint) et sous quelle forme : SIMPLEX : Dans ce mode, l émetteur émet des ordres, le récepteur les exécute uniquement. Le récepteur ne peut pas renvoyer un message .")
9
HALF DUPLEX : Dans ce mode, émetteur et récepteur peuvent recevoir et envoyer des messages. Cependant, chaque partie ne peut pas émettre et recevoir en même temps. l'être humain communique majoritairement sous cette forme car c'est elle qui permet de comprendre au mieux le message ( couper la parole de quelqu'un, c'est vouloir émettre un message en même temps .La communication devient alors difficile ). B o n j u r ! Q e l h s t - i ? I 1 6 H 5 M E R C a q p E M E T T E U R R E C E P T E U R é m e t t r e e t r e c e v o i r a l t e r n a t i v e m e n t .
. B. o. n. j. u. r. ! Q. e. l. h. s. t. - i. I H. 5. M. E. R. C. a. q. p. E. M. E. T. T. E. U. R. R. E. C. E. P. T. E. U. R. é. m. e. t. t. r. e. e. t. r. e. c. e. v. o. i. r. a. l. t. e. r. n. a. t. i. v. e. m. e. n. t. .")
10
FULL DUPLEX : Dans ce mode, chaque partie peut émettre et recevoir en même temps . Cette forme de communication permet aux organes de traitement d'émettre en même temps (donc de recevoir en même temps aussi) Cela nécessite dans ce cas, 2 voies de communication .L'être humain ne communique pas sous cette forme (car nous ne pouvons parler et écouter en même temps).
 Cela nécessite dans ce cas, 2 voies de communication .L être humain ne communique pas sous cette forme (car nous ne pouvons parler et écouter en même temps).")
11
LIAISON MULTIPOINT : La liaison MULTIPOINT implique la présence de plusieurs interlocuteurs (au moins 3).Ce type de liaison comporte généralement un central pouvant émettre des messages simultanément à tous les récepteurs. Par contre, chaque récepteur, autre que le central, ne peut émettre simultanément avec d'autres récepteurs. Pour pouvoir émettre, il doit attendre que la ligne de transmission soit libre pour émettre un message Exemple : Un cours dispensé à des élèves, correspond à une liaison multipoint. En effet, le professeur parle à l'ensemble de la classe. Lorsque le professeur pose une question, l'élève lève le doigt (demande de communication). A ce moment là, l'élève peut communiquer avec le central (le professeur).
.Ce type de liaison comporte généralement un central pouvant émettre des messages simultanément à tous les récepteurs. Par contre, chaque récepteur, autre que le central, ne peut émettre simultanément avec d autres récepteurs. Pour pouvoir émettre, il doit attendre que la ligne de transmission soit libre pour émettre un message. Exemple : Un cours dispensé à des élèves, correspond à une liaison multipoint. En effet, le professeur parle à l ensemble de la classe. Lorsque le professeur pose une question, l élève lève le doigt (demande de communication). A ce moment là, l élève peut communiquer avec le central (le professeur).")
12
LE FORMAT D’ECHANGE DES DONNEES :
Qu'est ce que le format d'échange ? Un caractère en ASCII n'est pas transmis seul. Il est associé à des bits de contrôle comme suit : Bit de START : Il indique le début de l'émission d'un caractère. Il est au 0 logique. Bit de parité : Le bit de parité est un moyen simple de vérifier la validité d'un message en indiquant si le nombre de 1 Logiques, sur l'ensemble du message est pair ou impair. S'il apparaît une discordance entre le nombre de 1 Logiques dénombré à la réception et le nombre indiqué par ce bit de parité, c'est qu'il y a erreur de transmission. Cette méthode rudimentaire fonctionne bien si la probabilité d'erreur est inférieure à 1 bit sur 8. Bit de STOP : Le bit de STOP indique la fin d'émission du caractère. Il est au 1 logique . Code ASCII : Américan Standart Code for Information Interchange. Code standard américain pour l'échange d'informations. Ce code permet d'affecter un code binaire à chaque caractère d'une machine à écrire ou clavier d'ordinateur. Le code ASCII étant un standard, il permet de transmettre des caractères avec la majorité des unités de traitement (voir le code ASCII).
.")
13
EXEMPLE : Dans l'exemple ci-dessous, on désire transmettre le caractère L avec une parité PAIRE.

14
Dans l'exemple suivant, on désire transmettre le caractère T avec une parité IMPAIRE.

15
LA VITESSE DE TRANSMISSION :
Elle définit la vitesse d'émission d'une information élémentaire. L'information élémentaire dans le cas des machines, c'est le bit. Cette vitesse se mesure en bits par seconde ( BPS ). Pour pouvoir communiquer correctement, l'émetteur et le récepteur doivent fonctionner à la même vitesse. Certaines vitesses sont souvent utilisées : 4800 BPS,9600 BPS,19200 BPS, BPS, etc... Plus la vitesse de transmission est élevée, et plus un message sera transmis rapidement.
. Pour pouvoir communiquer correctement, l émetteur et le récepteur doivent fonctionner à la même vitesse. Certaines vitesses sont souvent utilisées : 4800 BPS,9600 BPS,19200 BPS, BPS, etc... Plus la vitesse de transmission est élevée, et plus un message sera transmis rapidement.")
16
LE LANGAGE DE COMMUNICATION :
Deux personnes peuvent utiliser le même type de liaison, le même mode de transmission, la même vitesse de transmission sans toutefois se comprendre. Cela ne suffit pas !

17
Ici, le protocole c'est la langue
LE SUPPORT PHYSIQUE EST LE MÊME MAIS LA COMMUNICATION NE PEUT PAS S'ETABLIR. Il faut donc, non seulement un support physique, mais aussi un LANGAGE.Le langage utilisé pour communiquer entre les différents organes de traitement des données s'appelle : LE PROTOCOLE Le PROTOCOLE doit comporter non seulement des mots compréhensibles par les interlocuteurs, mais aussi un code d'émission et de réception. Ici la communication s'établit de la façon suivante: Ici, le protocole c'est la langue

18
LA COMMUNICATION PEUT S'ETABLIR CAR LE SUPPORT PHYSIQUE ET LE PROTOCOLE SONT LES MÊMES .
Bonjour ! ( servant à avertir qu'un message va être envoyé ) Quelle heure est - il ? (requête pour une demande d'information et attente de réponse ) il est 16 H 15 ( transmission de l'information ) merci ! ( accusé réception du message = message bien reçu ) Dans la majorité des cas, la communication entre organes de traitement se fait pas émission de codes ASCII Le code ASCII associe chaque caractère d'un clavier à un code binaire sur 7 ou 8 bits. Ex : le L s'écrit
 Quelle heure est - il (requête pour une demande d information et attente de réponse ) il est 16 H 15 ( transmission de l information ) merci ! ( accusé réception du message = message bien reçu ) Dans la majorité des cas, la communication entre organes de traitement se fait pas émission de codes ASCII. Le code ASCII associe chaque caractère d un clavier à un code binaire sur 7 ou 8 bits. Ex : le L s écrit")
19
code ASCII (American Standart Code for Information Interchange)
LE CODE A.S.C.I.I : code ASCII (American Standart Code for Information Interchange) Dans la majorité des cas, la communication entre organes de traitement se fait pas émission de codes ASCII Le code ASCII associe chaque caractère d'un clavier à un code binaire sur 7 ou 8 bits.
 Dans la majorité des cas, la communication entre organes de traitement se fait pas émission de codes ASCII Le code ASCII associe chaque caractère d un clavier à un code binaire sur 7 ou 8 bits.")
20
Comment lire le tableau ? code ASCII du caractère B :
en binaire prendre la suite de bits de b0 à b6 (attention au sens de lecture).
.")
21
------------ en héxadécimal ------------
prendre le chiffre représentatif de la colonne puis celui de la rangée (qui peut être une lettre).
.")
22
------------ en héxadécimal ------------
prendre le chiffre représentatif de la colonne puis celui de la rangée (qui peut être une lettre).
.")
23
QUELQUES STANDARDS UTILISES POUR TRANSMETTRE DES DONNEES :
RS 232 C ou V24 Elle comporte 2 lignes de transmission des données: une pour chaque sens, ainsi qu'un ensemble de lignes de contrôle et de commandes nécessaires à I'établissement d'un canal de communication. Toutes ces lignes sont référencées par rapport à un fil commun (terre de signalisation ou retour commun). La liaison RS 232 C est définie pour une longueur maximum de 15 mètres et un débit au plus égal a 20 Kbps. Pour les lignes de données: - tension > 0 (entre +5 et 15V ) = bit a 0 logique - tension < 0 (entre -5 et -15V ) = bit a 1 logique UTILISATION : liaisons courtes avec faibles débits ex : liaison souris - ordinateur ; liaison ordinateur - traceur
. La liaison RS 232 C est définie pour une longueur maximum de 15 mètres et un débit au plus égal a 20 Kbps. Pour les lignes de données: - tension > 0 (entre +5 et 15V ) = bit a 0 logique. - tension < 0 (entre -5 et -15V ) = bit a 1 logique. UTILISATION : liaisons courtes avec faibles débits. ex : liaison souris - ordinateur ; liaison ordinateur - traceur.")
24
RS 422A, RS 485 Ce standard diffère fondamentalement de la liaison RS 232 C car il définit un mode de transmission différentiel. Chaque signal de données est véhiculé sur 2 fils et n'est pas référence par rapport à une masse, mais présenté comme un signal différentiel aux sorties du transmetteur et aux entrées du récepteur. Le standard RS 485 est une extension du standard RS 422 A plus connu permettant des liaisons multipoint aussi bien que point a point. Tension de sortie circuit ouvert: 6 volts > Vo > - 6 volts La norme RS 485 est une extension du standard RS 422 qui consiste à boucler l'émetteur sur le récepteur Utilisation : liaisons < 1000 m ; débit jusqu'à 10 Mbits ex : liaison XBT - TSX liaisons industrielles

25
Boucle de courant présence d'un courant de 20 mA = 1 LOGIQUE
La particularité de cette norme est que la transmissions des bits de données se fait non pas en niveaux de tensions mais en niveaux de courants. La liaison par boucle de courant 20 mA est sans doute la plus ancienne des liaisons séries issue de la communication avec un télé-imprimeur et n'a jamais fait I'objet d'une normalisation . Elle se compose de deux boucles, une pour I'émission I'autre pour la réception, parcourues ou non par un courant de 20 mA obtenu à partir d'une source de tension. présence d'un courant de 20 mA = 1 LOGIQUE non présence d'un courant de 20 mA = 0 LOGIQUE UTILISATION : Par sa simplicité de mise en oeuvre, trouve de nombreuses applications lorsqu'un débit de quelques milliers de bits par seconde est suffisant

26
Standards de fait ou définis par des organismes privés
La normalisation Besoin de définir des protocoles normalisés ou standardisés afin que seule l ’implémentation des protocoles change Standards de fait ou définis par des organismes privés Organismes les plus connus : ISO : International Organisation for Standardisation ITU (ex CCITT) : International Telecommunication Union IEEE : Institute of Electrical and Electronic Engineers CCITT : Comité Consultatif International pour le Télégraphe et le Téléphone
 : International Telecommunication Union. IEEE : Institute of Electrical and Electronic Engineers. CCITT : Comité Consultatif International pour le Télégraphe et le Téléphone.")
27
Exemple Tour Meule Tour Scie Fraiseuse verticale Fraiseuse verticale
horizontale Tour Meule Tour Inspection finale Scie Préparation Stockage

28
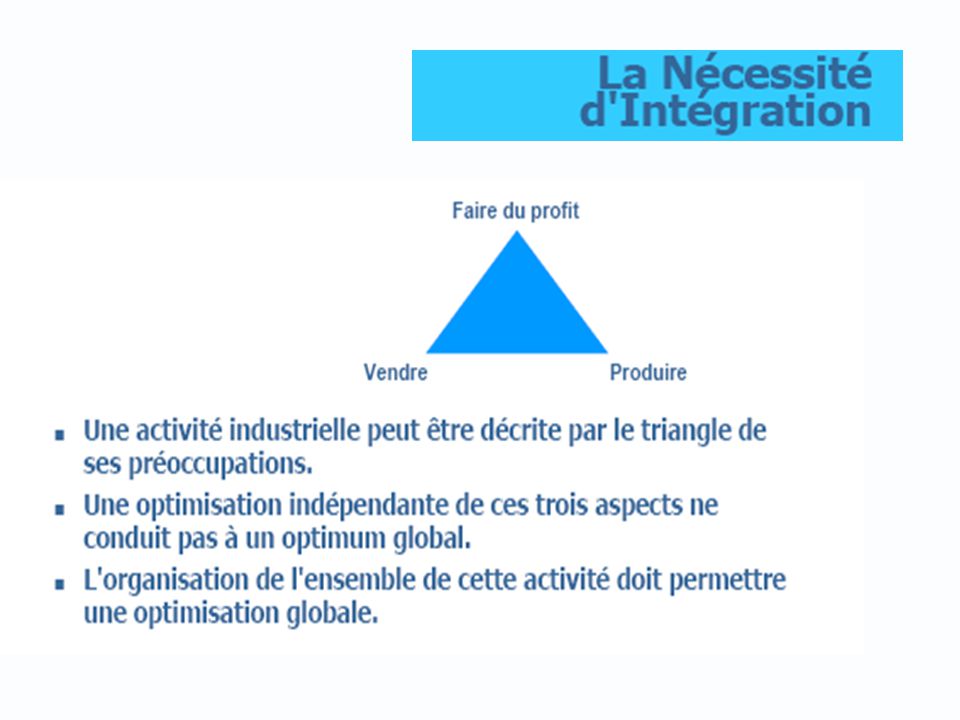
FABRICATION INTÉGRÉE C.I.M.
C’est l’intégration de toutes les technologies de l’information relatives aux différentes activités manufacturières de l’entreprise dans un système global permettant de communiquer entre les différents secteurs de celle-ci dans le but de raccourcir le temps de réponse à la demande, les temps de mise en route et les frais de main d’oeuvre indirecte.

29
Comment transformer… Introduire le linge Ajouter de l’eau
Et de la lessive Agiter Vidanger Lessive Sortir le linge Essorer Vidanger Rincer

30
Une machine à laver… Chargement - Linge Chargement Eau Lessive
Agitation - 20’ Vidange - Egoût Lessive Déchargement Linge Essorage - 5’ Vidange - Egoût Chargement - Eau Rinçage

31
En machine à café! Chargement Eau Café Agitation - 10” Vidange
- Tasses à café Café Vidange - Egoût Chargement - Eau Rinçage

32
Cellule de fabrication
s e m b l a g Tournage Fraisage Percage Traitement thermique Produit 1 Fraisage Percage Traitement thermique Produit 2 Tournage Fraisage Traitement thermique Produit 3

33
AMÉNAGEMENT PROCÉDÉ Produit 1 A s Produit 3 Percage e m Tournage b l a
Fraisage Traitement thermique Produit 2

35
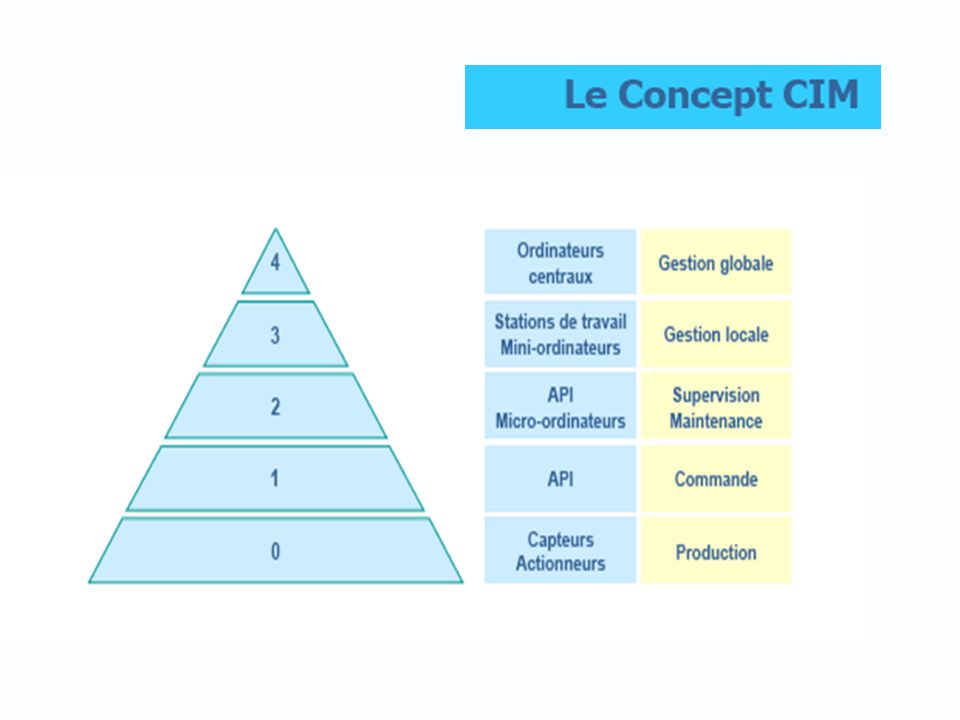
L'INTEGRATION IV) CLASSIFICATION FONCTIONS SYSTEMES INFORMATIONS
GESTION ENTREPRISE CALCULATEURS FICHIERS USINE CONTRÔLE PRODUCTION MICRO-ORDINATEUR ATELIER TABLEAUX COMMANDE CENTRALISEE SUPERVISION MESSAGES CELLULE AUTOMATISATION API CONTROLEURS REGULATEURS MACHINE MOTS DONNEES CAPTEURS ACTIONNEURS BITS TERRAIN PYRAMIDE CIM (Computer Integrated Manufacturing)
")
36
IV) CLASSIFICATION Temps de réponse VOLUME DE DONNEES
USINE TEMPS NON CRITIQUE TRAITEMENT DE DONNEES ATELIER TEMPS > 10 s CELLULE TEMPS < 1 s TRAITEMENT DE DONNEES EN TEMPS REEL TEMPS < 0,1 s MACHINE T < 0.01 s TERRAIN PYRAMIDE CIM (Computer Integrated Manufacturing) Temps de réponse
 Temps de réponse.")
37
IV) CLASSIFICATION INTERNET RESEAUX INFORMATIQUES BUS D ’USINE
ATELIER BUS D ’USINE CELLULE MACHINE BUS DE TERRAIN BUS SENSEUR/ACTEUR TERRAIN

39
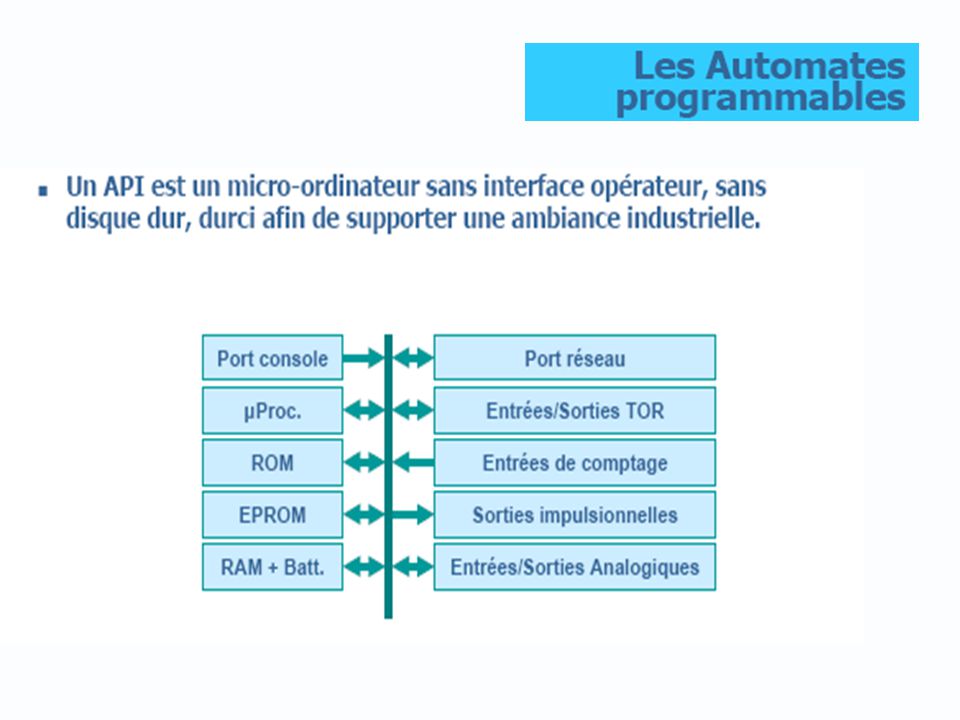
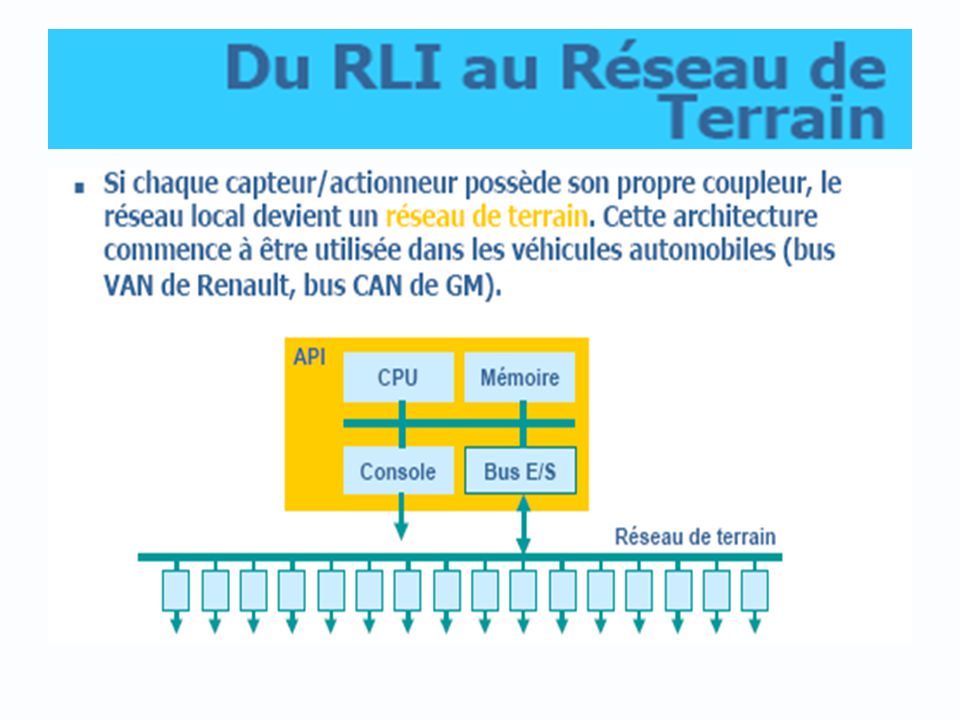
Les fonctions d ’automatisme
Acquisition d ’informations et commandes d ’actionneurs Entrées / sorties déportées sur bus de communication Dialogue opérateur Terminaux alphanumériques et touches de clavier Ecrans graphiques tactiles Enregistrement de conditions de fonctionnement Archivage et restitution, consignes Supervision Sommaire

40
Panorama des bus et réseaux de communication - 1 Communication entre un API et sa périphérie
Dialogue opérateur Entrées / Sorties déportées Capteurs / actionneurs TSX-Micro UNITEL-WAY MODBUS AS-i Magelis Régulateur Eurotherm TSX-Nano Démarreur Leroy-Somer KEP-France Démarreur API Milieu de gamme < 248 E/S

41
Panorama des bus et réseaux de communication - 2 Communication entre automates programmables
TSX 57 Premium S7-400 FIP-WAY PROFIBUS-DP S7-300 MODBUS UNITEL-WAY TSX Micro AS-i Communication entre un API et sa périphérie

42
Panorama des bus et réseaux de communication - 3 Communication entre équipements d’automatismes
GPAO Main Frame PC Supervision ETHERNET Industriel Unitel-Way Communication entre automates Communication entre API et périphérie Modbus Unitel-Way TSX Micro AS-i Fip-Way Premium S7-400 S7-300 Profibus TSX Micro

43
Panorama des bus et réseaux de communication - 4 Communication entre équipements d’automatismes et informatique ETHERNET Services Modbus Unitel-Way TSX Micro AS-i Communication entre APIs Fip-Way Premium S7-400 Communication entre API et périphérie S7-300 Profibus ETHERNET Industriel PC Supervision Main Frame GPAO Communication entre îlots d’automatismes PC Supervision Sommaire

44
Supervision : fonctions
Interface Homme / Machine Envoi de consignes / commandes Affichage des états Etat des alarmes Enregistrement de l ’évolution du process Restitution des états archivés

45
Supervision : systèmes
Architecture PC, ‘ ouverte ’ Stockage sur disque dur Ecran graphique standard ou durci PC ‘ tertiaire ‘ PC Industriel Automate Stockage sur cartes mémoire Flash PC-Card IHM spécifique et application dédiée Serveur Web embarqués Client sur navigateur standard

46
Supervision sur PC S.C.A.D.A. : Supervision Control And Data Acquisition Applications, sur système d ’exploitation dédié Utilise les technologies logicielles de l ’OS Une plateforme ‘ standard ’ : Microsoft Windows De nombreux fournisseurs

47
Supervision : quelques logiciels
Wizcon, Factorylink, Cimview, Fdc, Winlab, Cimplicity, Isis3000, Processyn, ...

48
Supervision : nombreux protocoles et matériels
FipWay, Fip I/O Modbus, Modbus Plus Profibus WorldFip CAN-Open, DeviceNet Interbus-S, FieldBus ControlNet Industrial Ethernet - TCP/IP Remarque : Chaque application a dû créer ses pilotes de communications Sommaire

49
Communication par Ethernet ou réseau IP
Norme IEEE 802.3 Réseau en étoile, pas de notion de priorité Gestion de collision, réseau non déterministe Ethernet commuté permet d ’améliorer la bande passante utile Utilisation de Switches au lieu de Hubs Connexion par prise RJ45

57
Protocoles de communication

58
Généralités-Modèle OSI

59
Définir le Bus de Terrain
TERRAIN = indique quelque chose de limité ou délimite géographique (Usine, Atelier, Voiture...), BUS = ensemble des fils (conducteurs) utilisés pour l ’échange de données entre différents circuits électroniques, RESEAU = ensemble de lignes de communication qui desservent une même unité géographique. BUS/RESEAU DE TERRAIN = réseau de communication numérique reliant différents types d ’équipements d ’automatisme. PROTOCOLE : relatif à une couche ISO, il désigne les règles de dialogue entre mêmes couches des entités communicantes.
, BUS = ensemble des fils (conducteurs) utilisés pour l ’échange de données entre différents circuits électroniques, RESEAU = ensemble de lignes de communication qui desservent une même unité géographique. BUS/RESEAU DE TERRAIN = réseau de communication numérique reliant différents types d ’équipements d ’automatisme. PROTOCOLE : relatif à une couche ISO, il désigne les règles de dialogue entre mêmes couches des entités communicantes.")
60
V But : Remplacement des boucles de courant 4-20 mA,
Distribution (décentralisation) du contrôle, du traitement des alarmes, diagnostics au différents équipements de terrain, Intelligence déportée au niveau de ces équipements, Interopérabilité (communication). M V
 du contrôle, du traitement des alarmes, diagnostics au différents équipements de terrain, Intelligence déportée au niveau de ces équipements, Interopérabilité (communication). M. V.")
61
Avantages : REDUCTION DES COUTS :
Réduction massive du câblage : 1 seul câble en général pour tous les équipements au lieu d’un par équipement, Réduction du temps d ’installation. REDUCTION DES COUTS DE MAINTENANCE Complexité moindre donc moins de maintenance Flexibilité pour l ’extension du bus de terrain et pour les nouveaux raccordements. PERFORMANCES GLOBALES ACCRUES - Précision de la communication numérique : la donnée numérique transférée est sans erreur de distorsion, de réflexion... - Les données et mesures sont généralement disponibles à tous les équipements de terrain, - Communications possibles entre 2 équipements sans passer par le système de supervision.

62
Sécurité des informations non garantie,
INCONVENIENTS : Non possibilité de prise en compte de l ’information en Temps Réel par rapport aux boucles de courant, Sécurité des informations non garantie, Choix du réseau : Topologie, vitesse de transmission, Supports physiques de communication, Choix entre solutions propriétaires et standards (il existerait 2000 bus de terrain différents), Compatibilité totale entre équipements de fournisseurs différents ?
, Compatibilité totale entre équipements de fournisseurs différents")
63
Modèle OSI de ISO OSI : Open System Interconnection
ISO : International Standard Organization Segmente les fonctionnalités d’un système communiquant selon 7 couches. Chaque couche garantit à la couche qui lui est supérieur que le travail qui lui à été confié a été réalisé sans erreur.

64
Le Modèle OSI possède 7 couches
Couches de 1 à 4: couches basses chargées d ’assurer un transport optimal des données Couches 5 à 7: couches hautes chargées du traitement des données APPLICATION 7 6 5 4 3 2 1 PRESENTATION SESSION TRANSPORT RESEAU LIAISON PHYSIQUE APPLICATION 7 6 5 4 3 2 1 PRESENTATION SESSION TRANSPORT RESEAU LIAISON PHYSIQUE PROTOCOLE MESSAGES SERVICE PAQUETS TRAMES BITS SUPPORT PHYSIQUE

65
Couche 2 : Liaison de données
Couche 1 : Physique Définit la nature du support physique de la communication et le codage de l'information : type de câble, transmission hertzienne, connecteurs, signaux électriques, codage binaire de l'information… Couche 2 : Liaison de données Divisé en deux sous couches : LLC (Logical Link Control) : Gère le contrôle et le flux des informations. CRC(code de redondance cyclique) et réitérations associées… MAC (Medium Access Control): Gère le partage de l'accès au médium (CSMA/CD, arbitrage de bus…) Couche 3 : Réseau Gère l'adressage des informations : qui est le destinataire de mes messages, numéro d'équipement ou de station, sur quel réseau…
 : Gère le contrôle et le flux des informations. CRC(code de redondance cyclique) et réitérations associées… MAC (Medium Access Control): Gère le partage de l accès au médium (CSMA/CD, arbitrage de bus…) Couche 3 : Réseau. Gère l adressage des informations : qui est le destinataire de mes messages, numéro d équipement ou de station, sur quel réseau…")
66
Couche 4 : Transport Couche 5 : Session Couche 6 : Présentation
Transport de l'information de bout en bout entre deux stations distantes : segmentation des trames… (Note : la trame est l ’entité transportée sur les lignes physiques. Elle rassemble un certain nombre d ’octets) Couche 5 : Session Gère la notion de session, intervalle de temps pendant lequel deux équipements sont en communication et reprise de contexte suite à interruption. Couche 6 : Présentation Définit la représentation des informations : encodage, compression ou cryptage de l'information. Couche 7 : Application Définit la nature des informations échangées : messagerie, transfert de fichiers…
 Couche 5 : Session. Gère la notion de session, intervalle de temps pendant lequel deux équipements sont en communication et reprise de contexte suite à interruption. Couche 6 : Présentation. Définit la représentation des informations : encodage, compression ou cryptage de l information. Couche 7 : Application. Définit la nature des informations échangées : messagerie, transfert de fichiers…")
68
Différents modes de transmission

69
Mécanismes d ’accès au médium
C ’est la gestion de l ’accès au support physique. On distingue les mécanismes suivants : Maître-esclaves, Arbitrage de bus, Maîtres-esclaves, Bus à jeton, C.S.M.A (Carrier Sense Multiple Access.)
")
70
Maître-esclaves Un seul équipement, le maître est à l’initiative de tous les échanges, les autres équipements, les esclaves, se contentant de répondre lorsque le maître le leur demande.

71
Arbitrage de bus Le mécanisme est assez voisin du précédent dans le sens où un seul équipement, l’arbitre de bus, attribue un droit de parole à tour de rôle à chacun des autres équipements. La principale différence est que chacun des équipements, lorsqu’il fait usage de son droit de parole, peut adresser ses informations à n’importe quel autre équipement, ou même à tous simultanément (diffusion).
.")
72
Maîtres-esclaves Le réseau fonctionne en maître-esclave comme vu précédemment, mais le réseau peut changer de maître. La main passe d'un maître à un autre par transmission d'un message particulier baptisé « jeton ». L'efficacité de ce procédé est liée à la rapidité de propagation du jeton dans l'anneau logique constitué par la succession des différents maîtres.

73
Bus à jeton (token ring)
Un jeton, correspondant à un droit de parole, passe de station en station, selon un ordre déterminé. Chaque station peut émettre vers n’importe quelle autre station tant qu’elle possède le jeton mais ne peut garder celui-ci que pour une durée limitée, définie par configuration C.S.M.A (Carrier Sense Multiple Access) L'objectif de ces méthodes est de permettre à toute station de s'exprimer quand bon lui semble. Avantages : Optimisation du traffic, Répartition de la maîtrise du réseau Inconvénients : Trafic aléatoire, Risque de collisions On note aussi : CSMA/CD : CD = Collision Detection
 L objectif de ces méthodes est de permettre à toute station de s exprimer quand bon lui semble. Avantages : Optimisation du traffic, Répartition de la maîtrise du réseau. Inconvénients : Trafic aléatoire, Risque de collisions. On note aussi : CSMA/CD : CD = Collision Detection.")
74
Supports de communication
Sommaire Modèle OSI Différents modes de transmission Les différents modes de communication - Modbus - Spabus - LON - Profibus Perspective d ’avenir : Ethernet Supports de communication

75
Supports physiques de communication

76
Le cuivre (câbles électriques):
Avantages : possibilité de multi-point, de télé-alimentation Inconvénients : la longueur permise (portée) est inversement proportionnelle au débit d’information (bits/seconde), problèmes de compatibilité électromagnétique. Risque d ’incendie en cas de court-circuit. La paire torsadée blindée La conjugaison des effets de torsade et de cage de Faraday (blindage) atténue fortement la sensibilité aux rayonnements extérieurs. De coût attractif, il est le médium d’usage courant pour les réseaux de terrain. Débit x Portée = 108 à 109 bits.m/s. (exemple : 1Mbit/s : 100m à 1 km)
 est inversement proportionnelle au débit d’information (bits/seconde), problèmes de compatibilité électromagnétique. Risque d ’incendie en cas de court-circuit. La paire torsadée blindée. La conjugaison des effets de torsade et de cage de Faraday (blindage) atténue fortement la sensibilité aux rayonnements extérieurs. De coût attractif, il est le médium d’usage courant pour les réseaux de terrain. Débit x Portée = 108 à 109 bits.m/s. (exemple : 1Mbit/s : 100m à 1 km)")
77
Le câble coaxial La fibre optique
Constitué d’une âme centrale et d’un blindage extérieur, il permet pour un prix abordable d’atteindre des débits supérieurs tout en présentant une bonne immunité aux parasites ambiants. Débit x Portée = 5,108 à 1011 bits.m/s. (exemple : 10Mbit/s : 50m à 10km) La fibre optique Il est de plus en plus fréquent d’utiliser la fibre optique, qui est une sorte de “tuyau” à lumière. Son coût au mètre devient très concurrentiel, et ses problèmes de raccordement se simplifient. Avantages : immunité aux parasites ; le débit d’information permis par la fibre optique n’est pas fonction de sa longueur (kilomètres et centaines de Mbit/s). Inconvénients : Elle ne permet que laborieusement la mise en parallèle, Mise en œuvre difficile (enceinte de mise en œuvre doit être propre).
 La fibre optique. Il est de plus en plus fréquent d’utiliser la fibre optique, qui est une sorte de tuyau à lumière. Son coût au mètre devient très concurrentiel, et ses problèmes de raccordement se simplifient. Avantages : immunité aux parasites ; le débit d’information permis par la fibre optique n’est pas fonction de sa longueur (kilomètres et centaines de Mbit/s). Inconvénients : Elle ne permet que laborieusement la mise en parallèle, Mise en œuvre difficile (enceinte de mise en œuvre doit être propre).")
78
Topologies Le raccordement physique entre les différentes stations d’un réseau peut être réalisé suivant des schémas de natures très différentes baptisées “topologies”. Les documents constructeurs ont la fâcheuse habitude de confondre câblage et topologie, et profitent de la liberté de câblage qu’offre en général un bus pour l’affubler de désignations usurpées telles que “topologie libre” etc...

79
Topologies de type “bus”
C’est une “topologie à médium partagé” car toutes les stations sont raccordées “en parallèle” via le médium qui parcourt le site. Ceci implique que chaque abonné doit être apte à se taire. Avantages : Simplicité de mise en œuvre ; rapidité. Inconvénients : Une défaillance du médium affecte la totalité du segment considéré ; conflits d’accès.

80
Topologies en anneau Topologie en forme de boucle où chaque station ne peut s’adresser qu’à sa voisine. Il s’agit donc cette fois d’une “topologie point à point”. A noter qu’ici, chaque station régénère le signal, ce qui multiplie grosso modo la portée par le nombre de stations. Avantages : détection de défaillance, localisation des défaillances de médium Inconvénient : Un simple dialogue entre deux stations distantes passe par un certain nombre d’intermédiaires, ce qui rallonge d’autant les temps de propagation.

81
Câblages réseaux point-à-point:
Maillage régulier Anneau Arbre Etoile

82
Transmission de données

83
Transmission parallèle
Si un octet doit être transmis, tous les bits du même octet sont émis simultanément. Cela signifie qu’à chaque bit correspond une liaison conductrice séparée, c’est-à-dire un fil conducteur. C’est une transmission rapide. Son coût et le nombre de fils la rend inapte pour les longues distances. Transmission sérielle L’envoi des bits l’un après l’autre, sur le même support physique, à l’inverse de la transmission de données parallèle où l’envoi des bits est simultané. C’est une transmission plus lente. Elle permet un grand nombre d’applications avec une faible contrainte d’encombrement ; la transmission peut s’effectuer avec trois fils, elle est donc plus économique pour des longues distances.

84
Mode Synchrone : La transmission se produit à des instants et pendant des durées fixes, définis à l’avance. Les codes numériques doivent se suivre. Mode Asychrone : La transmission se produit à des instants aléatoires. Les codes numériques ne doivent pas être émis en continu.

85
Norme RS 232 (Recommended Standard de l ’EIA) :
utilisé pour des liaisons point à point sans différentiel de tension soumis aux parasites ambiants le standard international équivalent est le V.24 qui définit les caractéristiques mécaniques et la nature des signaux et le V.28 définit les tensions appropriées. Norme RS 422 : même que RS 232 mais avec différentiel de tension (immunité aux parasites). Norme RS 485 : définit les conditions d'interconnexion de plusieurs circuits émetteurs et récepteurs (transceivers) utilisés dans des systèmes multipoint en mode symétrique (Bus 2 fils). la particularité de cette liaison est de permettre la connexion de plusieurs appareils. dans ce protocole chaque appareil a la possibilité d'autoriser ou d'interdire la transmission.
. Norme RS 485 : définit les conditions d interconnexion de plusieurs circuits émetteurs et récepteurs (transceivers) utilisés dans des systèmes multipoint en mode symétrique (Bus 2 fils). la particularité de cette liaison est de permettre la connexion de plusieurs appareils. dans ce protocole chaque appareil a la possibilité d autoriser ou d interdire la transmission.")
86
MODBUS

87
MODBUS C ’est un protocole de transmission de données régissant le dialogue entre une station maître et des esclaves. Un maître unique peut communiquer avec jusqu ’à 255 équipements esclaves. Un des protocoles les plus répandus dans le domaine des réseaux de terrain. Définit une structure de messages pouvant être utilisée par les automates quel que soit le type de réseau sur lequel ils communiquent. Le protocole communique avec les autres équipements via une liaison RS232 (point-à-point) ou une liaison série RS485/RS422 (multi-points). Définit 2 types de codage : ASCII et RTU.
 ou une liaison série RS485/RS422 (multi-points). Définit 2 types de codage : ASCII et RTU.")
88
Mode ASCII (American Standard Code for Information Interchange) : chaque paquet de 8 bits est envoyé comme 2 caractères ASCII. Mode RTU (Remote Terminal Unit): chaque paquet de 8 bits dans le message contient 1 caractère hexadécimal. Le mode RTU offre de meilleurs performances que le mode ASCII du fait du compactage de données. En effet, avec le mode ASCII le nombre de bits envoyés est doublé tandis que le mode RTU envoi les bits comme ils sont.
: chaque paquet de 8 bits dans le message contient 1 caractère hexadécimal. Le mode RTU offre de meilleurs performances que le mode ASCII du fait du compactage de données. En effet, avec le mode ASCII le nombre de bits envoyés est doublé tandis que le mode RTU envoi les bits comme ils sont.")
89
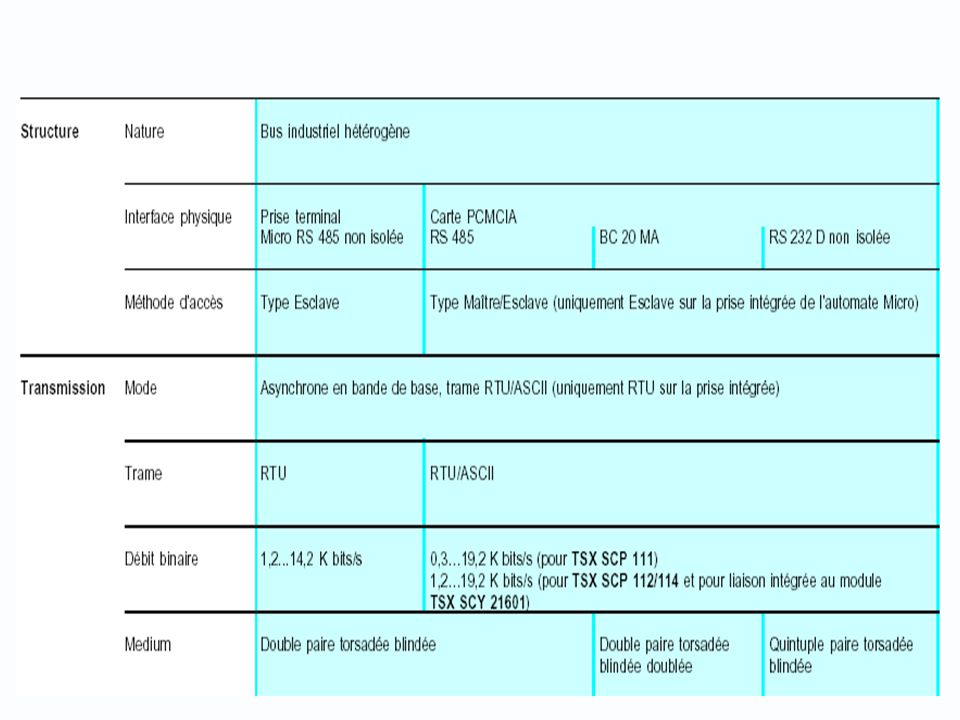
Caractéristiques

91
RS 485 RS 232

92
MODBUS Plus : un réseau ! Est un réseau local industriel performant permettant de répondre à des architectures étendues de type Client/Serveur, combinant haut débit (1Mbits/s), support de transmission simples et économiques et nombreux services de messagerie.
, support de transmission simples et économiques et nombreux services de messagerie.")
93
- SPA-bus Sommaire Modèle OSI Différents modes de transmission
Supports de communication Les différents modes de communication - Modbus - LON - Profibus Perspective d ’avenir : Ethernet - SPA-bus

94
SPABUS Originairement conçut comme bus de terrain pour les systèmes de protection, de contrôle et d ’enregistreur d ’événement. Le protocole utilise le mode un maître et plusieurs esclaves. Les messages sont basés sur les caractères du code ASCII. Communication sous forme interrogation/réponse ou sous forme diffusion générale et utilise la transmission sérielle asynchrone. La construction de base du protocole suppose que les esclaves ne peuvent prendre l’initiative d’engager le dialogue avec le maître mais que le maître est au courant des données que contiennent les esclaves et, par conséquent, peut demander les données dont il a besoin. De plus le maître peut envoyer des données à l’esclave.

95
Communication : Le maître amorce les communications en envoyant un message au bus. L'esclave, qui reconnaît son propre numéro d'esclave dans le message du maître, répond en envoyant un message de réponse approprié. L'esclave ne répond pas s'il n'a pas reçu le caractère de début de message (>), son propre numéro d’esclave et le caractère de fin de message (cr).
, son propre numéro d’esclave et le caractère de fin de message (cr).")
96
Caractéristiques Vitesse de transfert : 9600 bit/s. (Dans certain cas : 300, 1200, 2400 ou 4800 bit/s) Le temps maximum pour un esclave de répondre est de 50 ms mais c ’est à éviter le temps recommandé est de 5 ms. La longueur maximale d ’un message est de 255 caractères. Supports physiques de communication : RS 485, RS 232, fibre optique (en verre ou en plastique).
.")
97
LON

98
LON (Local Operating Networks)
Un réseau multi-maîtres avec le protocole d’accès CSMA/CA (CA : Collision Avoidance). LonWorks respecte le modèle OSI complet (couches 1 à 7) contrairement au bus de terrain “ classique ” (couches 1,2 et 7). LonWorks est bâti autour de 3 briques importantes : Circuit Neuron Chip : composé de 3 microcontrôleurs 8 bits pour la gestion des protocoles et des E/S, Protocoles de communication LonTalk dans le circuit Neuron Chip, “ Transceiver ” propre et adapté à différents supports de transmission. LonWorks est à ranger dans la catégorie des bus de terrain. Il permet néanmoins d’opérer au niveau supérieur (atelier)
. LonWorks respecte le modèle OSI complet (couches 1 à 7) contrairement au bus de terrain classique (couches 1,2 et 7). LonWorks est bâti autour de 3 briques importantes : Circuit Neuron Chip : composé de 3 microcontrôleurs 8 bits pour la gestion des protocoles et des E/S, Protocoles de communication LonTalk dans le circuit Neuron Chip, Transceiver propre et adapté à différents supports de transmission. LonWorks est à ranger dans la catégorie des bus de terrain. Il permet néanmoins d’opérer au niveau supérieur (atelier)")
99
Médium : paire torsadée, câble coaxial, courant porteur, fibre optique
Topologie : anneau, bus Nombre max de noeuds : par domaine Débit brut de 2 kbit/s à 1,25 Mbit/s suivant transceiver (PLT-20 : 2kbit/s, XF-1250 : 1,25 Mbit/s) Longueur maximale dépendant de la topologie, du transceiver et du débit (de 500 m à 2700 m)
 Longueur maximale dépendant de la topologie, du transceiver et du débit (de 500 m à 2700 m)")
100
PROFIBUS

101
Il s’agit de systèmes multi-maîtres/multi-esclaves basés sur une structure d’anneau logique. L’accès au bus est régi par un mécanisme hybride combinant le passage d’un jeton tournant entre les maîtres et la scrutation cyclique des esclaves. Profibus spécifie les caractéristiques techniques d’un bus de terrain série destiné à interconnecter des automatismes numériques répartis aux niveaux terrain et cellule. Profibus autorise le dialogue de matériel multiconstructeurs pour la transmission de données rapides (déterminisme) mais aussi pour les échanges de grandes quantités d ’informations (non déterministes).
 mais aussi pour les échanges de grandes quantités d ’informations (non déterministes).")
102
Profibus possède 2 protocoles de transmission ou profils de communication :
profil de communication DP (Decentralized Periphery) : le plus répandu, simple et performant, profil de communication FMS (Fieldbus Message Specification ) : plus évolué pour des tâches complexes, Profibus utilise 3 type de transmission : Transmission RS-485 Transmission IEC (comme le RS 485 mais utilisée qu ’en process) Transmission optique Profibus définit des profils applicatifs conjuguant profils de communication et supports de transmission adaptés à un type d ’application : - profil PROFIBUS-PA (process automation)
 : le plus répandu, simple et performant, profil de communication FMS (Fieldbus Message Specification ) : plus évolué pour des tâches complexes, Profibus utilise 3 type de transmission : Transmission RS-485. Transmission IEC (comme le RS 485 mais utilisée qu ’en process) Transmission optique. Profibus définit des profils applicatifs conjuguant profils de communication et supports de transmission adaptés à un type d ’application : - profil PROFIBUS-PA (process automation)")
103
2) PROFIBUS DP (Distributed Periphericals)
PHYSIQUES Topologie: bus ou anneau Médium: Paire torsadée, fibre Distance: 100m à 12 Mbps 1200m à 9.6 Kbps Nombre de nœuds: 127 COMMUNICATION Principe de communication: Maître/Esclave Vitesse: 9.6 Kbps à 12 Mbps Taille des données: 244 octets DIVERS Profibus PA dépend d ’un maître sur Profibus DP vitesse=31.25 Kbps Données et puissance sur le même câble PROFInet bus de terrain sous TCP/IP devrait remplacer Profibus FMS

104
Industrial ETHERNET Ethernet est une technologie de plus en plus utilisée comme solution de communication dans l’industrie. Utilisation inéluctable dans les ateliers : technologie banalisée, performante, fiable, peu onéreuse Son point faible : son indéterminisme dû à la méthode d ’accès CSMA/CD Mais Ethernet sera incontournable pour mettre en œuvre des programmes d ’automatisation répartis d ’autant plus que les flux de données ne cessent de croître.

105
Ethernet comme bus de terrain ?
Avantages : Interface Ethernet bon marché, Compatibilité avec les solutions informatiques de gestion, Protocoles banalisés ouverts et utilisables immédiatement, Augmentation constante des débits : 10, 100, 1000 Mbit/s, Inconvénients : Câblage complexe et onéreux (hub, switch…), Connectique non adaptée au milieu industriel (RJ45 vs M12), Sécurité du réseau non assuré, Protocoles classiques non adaptés aux contraintes industrielles, Contraintes temporelles non garanties.
, Connectique non adaptée au milieu industriel (RJ45 vs M12), Sécurité du réseau non assuré, Protocoles classiques non adaptés aux contraintes industrielles, Contraintes temporelles non garanties.")
106
LES ALTERNATIVES ETHERNET INDUSTRIELLES
4 alternatives existent (et s ’affrontent) : - Initiative EtherNet/IP de Rockwell - Projet ProfiNet de Siemens - Spécification HSE (High Speed Ethernet) de Fieldbus Foundation 2 grandes catégories de solutions techniques : - Solutions qui encapsulent les données dans une trame Ethernet ou paquet TCP/UDP (Ethernet/Industrial Protocol) - Solutions qui utilisent des passerelles ou des serveurs
 : - Initiative EtherNet/IP de Rockwell. - Projet ProfiNet de Siemens. - Spécification HSE (High Speed Ethernet) de Fieldbus Foundation. 2 grandes catégories de solutions techniques : - Solutions qui encapsulent les données dans une trame Ethernet ou paquet TCP/UDP (Ethernet/Industrial Protocol) - Solutions qui utilisent des passerelles ou des serveurs.")
108
Protocoles de type maître/esclave Adaptés : Pour un tableau automatisé de base, ne gérant que des commandes et des comptes rendus d ’états. Non adaptés : - Pour des fonctions requises nécessitant la transmission de mesures : -> temps de scrutation augmente, -> changement d ’état d ’un appareil ne sera connue que lors de la prochaine scrutation. - Pour des traitements répartis : -> la centrale ne peut jouer son rôle de maître que si toutes les informations passent par elle.

109
Protocoles CSMA (Carrier Sense Medium Access) Permettent aux stations connectées au réseau d ’émettre spontanément uniquement en cas de besoin. Contraintes : - risque de collision, - temps de réponse non déterministe (non constant), - détection de stations en panne. Avantages : - optimisation des échanges, - réduction des coûts, - décentralisation des traitements
, - détection de stations en panne. Avantages : - optimisation des échanges, - réduction des coûts, - décentralisation des traitements.")
110
Exemple de Système flexible

111
Partie 1 : L'architecture

112
Les 5 machines Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage Chacune des 5 machines est commandée par un automate TSX3722 Chaque automate dispose de sa propre console de programmation (environnement pédagogique) Les automates sont interconnectés grâce à un réseau local Fipway
 Les automates sont interconnectés grâce à un réseau local Fipway.")
113
La supervision Le poste de supervision est relié au réseau Fipway
Un réseau bureautique relie l'ensemble des ordinateurs entre-eux Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

114
Le service "création design"
Le poste de création du design des stylos est relié au réseau bureautique et notamment, par conséquent, au superviseur Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

115
L'unité de production est connectée à Internet
La connexion Internet Internet L'unité de production est connectée à Internet Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

116
Partie 2 : La procédure

117
Le service "création design" compose une nouvelle
Etape 1 Le service "création design" compose une nouvelle gamme de produits à chaque saison, et transfert les données de production relatives à ces produits dans le superviseur Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

118
Le service "création design" prépare les pages web commerciales
Etape 2 Le service "création design" prépare les pages web commerciales et met les collections à disposition du public sur le serveur Internet Serveur Internet Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

119
Etape 3 Les clients sélectionnent les stylos de leurs rêves sur la page web et envoient le formulaire de commande Serveur Internet Ordinateur du client Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

120
Les commandes sont enregistrées
Etape 4 Les commandes sont enregistrées Serveur Internet Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage

121
Transfert des gammes de fabrication
Etape 5 Après organisation des campagnes de production sur le superviseur, les données relatives aux stylos à fabriquer sont transférées vers tous les automates Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage Transfert des gammes de fabrication vers les automates

122
Echanges de données de production entre superviseur et automates
LABORATOIRE DIDACTIQUE - IUT MULHOUSE Etape 6 La production est gérée automatiquement en fonction des stylos à fabriquer Le rôle du superviseur consiste maintenant à permettre le pilotage centralisé de l'unité de production Notez qu'à aucun moment, il a fallu changer les programmes des automates : il s'agit d'un système flexible. Machine 1 : magasin-tour Machine 2 : transfert Machine 3 : gravure Machine 4 : peinture Machine 5 : triage-assemblage Echanges de données de production entre superviseur et automates Echanges de données entre automates

123
Merci de votre attention
DEVELOPPEMENT DES GRAFCETS Merci de votre attention Vous pouvez m'adresser vos remarques : Rendez-vous sur le net :

124
Objectif de ce diaporama
Montrer, à travers un exemple simple, la différence entre une approche intuitive d'un problème d'automatismes et une approche raisonnée

125
Etude de cas à titre d'exemple
Poste A Sortie cellule stock aval Entrée cellule stock amont Poste B Soit un robot chargé de gérer un flux de pièces à travers une cellule composée de 2 postes : les pièces qui se présentent en amont de cette cellule subissent une opération soit sur le poste A, soit sur le poste B, avant de rejoindre le stock en aval. Avant d'élaborer un premier grafcet, observons cette cellule en fonctionnement ...

126
Le robot est en attente de l’arrivée d’une pièce au stock amont.
Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

127
Une pièce se présente. Le robot la saisit.
Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

128
Il la transporte vers un poste libre (poste A par exemple).
Entrée cellule stock amont Sortie cellule stock aval Poste B

129
Poste A Sortie cellule Entrée cellule stock aval stock amont Poste B
Le robot dépose la pièce sur le poste A. Entre-temps, une autre pièce s’est présentée au stock amont. Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

130
Le robot se présente au stock amont. (Le poste A travaille).
Entrée cellule stock amont Sortie cellule stock aval Poste B

131
Le robot saisit la pièce.
Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

132
Poste A Sortie cellule Entrée cellule stock aval stock amont Poste B
Le robot transporte la pièce vers le poste libre. (Poste B, puisque A est occupé) Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B
 Poste A. Entrée cellule. stock amont. Sortie cellule. stock aval. Poste B.")
133
Poste A Sortie cellule Entrée cellule stock aval stock amont Poste B
Le robot dépose la pièce sur le poste B. Entre-temps, une autre pièce s’est présentée au stock amont, mais plus aucun poste n’est libre : le robot est en attente. Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

134
Le travail sur le poste A s’est terminé. Le robot réagit.
Entrée cellule stock amont Sortie cellule stock aval Poste B

135
Le robot se présente au poste A.
Entrée cellule stock amont Sortie cellule stock aval Poste B

136
Le robot saisit la pièce au poste A ...
Entrée cellule stock amont Sortie cellule stock aval Poste B

137
… puis la transporte vers la sortie de la cellule ...
Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

138
Poste A Sortie cellule Entrée cellule stock aval stock amont Poste B
… pour l’y déposer. Le robot peut maintenant s’occuper soit de la pièce au stock amont, soit de la pièce du poste B selon l'ordre de priorité. Poste A Entrée cellule stock amont Sortie cellule stock aval Poste B

139
Tracer une première version
Voilà comment on procède habituellement pour traiter ce type de problèmes ... Corriger , puis aménager Tracer une première version Tracer l’étape initiale Tracer la « première » action SAm Compléter en détaillant tous les cas SAm SB DA DAv « Simplifier » Prévoir les évolutions possibles DA DB SA SAm DAv Ne rien oublier SA DAv SB S : Saisir D : Déposer A et B : postes A et B Am et Av : Amont et Aval de la cellule

140
Que peut-on dire de cette façon de procéder :
On voit que cette démarche est sans rigueur. Plusieurs phases d’essais ont conduit à un tracé peu clair. Il est possible que des erreurs soient encore présentes : « a-t-on suffisamment corrigé-amélioré ? » « a-t-on prévu tous les cas ? »

141
GERER LE FLUX DES PIECES
Voilà maintenant comment la méthode proposée dans cet ouvrage traite ce type de problèmes ... Définition de la fonction principale : niveau 1 Fonction principale : GERER LE FLUX DES PIECES Dans la formulation des fonctions, on veillera à utiliser un vocabulaire général, ne faisant PAS référence à la technologie employée

142
GERER LE FLUX DES PIECES
. Décomposition de la fonction principale : niveau 2 Fonction principale : GERER LE FLUX DES PIECES Fonction composante X : ALIMENTER LES POSTES Fonction composante Y : EVACUER LES POSTES Evacuer Alimenter La synchronisation de ces fonctions est représentée par l'épure d'un grafcet à sélection de séquence puisque le robot peut être amené soit à alimenter soit à évacuer un poste, sans qu'une quelconque chronologie soit systématique.

143
GERER LE FLUX DES PIECES
. Décomposition des fonctions du niveau 2 : niveau 3 Evacuer Fonction principale : GERER LE FLUX DES PIECES Fonction composante X : ALIMENTER LES POSTES (fonction non étudiée pour l'instant) Alimenter SAISIR UNE PIECE DEPOSER Saisir Déposer A ce niveau d'analyse, l'épure du grafcet est de structure linéaire puisqu'une saisie est OBLIGATOIREMENT suivie d'une dépose et inversement.
 Alimenter. SAISIR. UNE PIECE. DEPOSER. Saisir. Déposer. A ce niveau d analyse, l épure du grafcet est de structure linéaire puisqu une saisie est OBLIGATOIREMENT suivie d une dépose et inversement.")
144
GERER LE FLUX DES PIECES
. Décomposition des fonctions du niveau 3 : niveau 4 Evacuer Fonction principale : GERER LE FLUX DES PIECES Fonction composante X : ALIMENTER LES POSTES Alimenter SAISIR UNE PIECE DEPOSER Saisir Déposer SAm DA DB L'épure du grafcet montre qu'une pièce qui a été saisie en amont de la cellule peut être déposée sur l'un des deux postes A ou B. (La sélection se fera en temps réel en fonction de leur disponibilité.) SAm DA DB
 SAm. DA. DB. ")
145
GERER LE FLUX DES PIECES
. … même analyse pour la fonction EVACUER ... Fonction principale : GERER LE FLUX DES PIECES Fonction composante X : ALIMENTER LES POSTES Fonction composante Y : EVACUER LES POSTES Alimenter Evacuer SAISIR UNE PIECE DEPOSER SAm DA DB SAISIR UNE PIECE DEPOSER DAv SA SB DAv SA SB

146
GERER LE FLUX DES PIECES
. Synthèse : consiste à "assembler les morceaux du puzzle" Fonction principale : GERER LE FLUX DES PIECES Fonction composante X : ALIMENTER LES POSTES Fonction composante Y : EVACUER LES POSTES Alimenter SAISIR UNE PIECE DEPOSER SAm DA DB DAv SA SB Evacuer

147
. On obtient la structure générale du grafcet Fonction Alimenter
Fonction Evacuer DA DB DAv SAm SA SB 1 Niveau « saisir » Niveau « déposer »

148
. On complète seulement maintenant par les réceptivités
DA DB DAv SAm SA SB 1 Equations logiques pour gérer les priorités Selon le besoin, on augmente la flexibilité du système en utilisant des structures de données en complément du grafcet : recettes, files d’attente...

149
Avantages sur un plan technique
1 Avantages sur un plan technique Interprétation claire … la structure du grafcet reste très lisible, même si le fonctionnement de la cellule peut sembler aléatoire et compliqué Structure stable … la complexité du grafcet ne croît pas lorsque le nombre de postes augmente Mise au point progressive des conditions d’évolution … au fur et à mesure de l'exploitation de la cellule, il est très commode d'affiner son fonctionnement, simplement en ajoutant ou en modifiant des conditions au niveau des réceptivités Amélioration de la flexibilité … en utilisant des structures de données de type recettes ou files d'attente, on permet une plus large flexibilité. Ce point est largement illustré dans l'ouvrage.

150
Avantages sur un plan pédagogique
1 Avantages sur un plan pédagogique Approche raisonnée … il est intéressant de développer chez les étudiants un esprit d'analyse basé sur une approche raisonnée, en même temps qu'on favorise un état d'esprit davantage tourné vers les essais-erreurs et l'expérimentation : on montrera ainsi la richesse de la diversité des points de vue Importance de l’effort d’analyse … il est malheureusement de coutume chez un certain nombre d'étudiants de "foncer tête baissé" dans la programmation, surtout dans les filières ou les programmations de toutes sortes font leur quotidien (!?!). Une telle approche, basée sur une analyse des fonctions, semble en général ne pas être superflue ...
. Une telle approche, basée sur une analyse des fonctions, semble en général ne pas être superflue ...")
Présentations similaires

















>")






>")