Machine asynchrone (première partie) ELEC 2753 Electrotechnique Machine asynchrone (première partie)
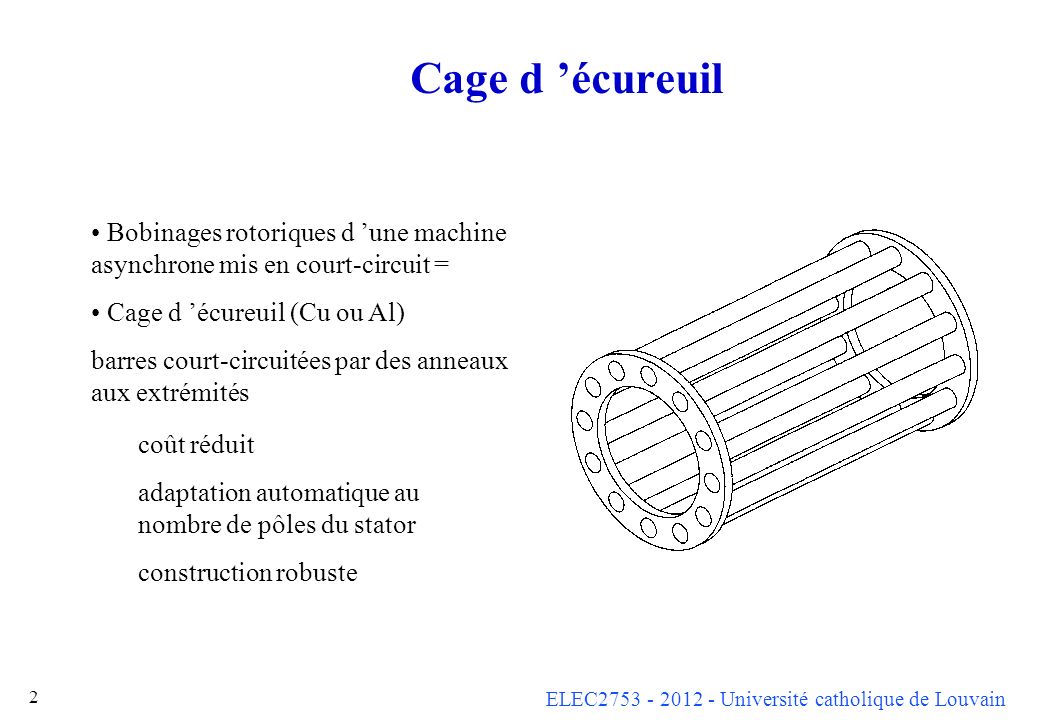
Cage d ’écureuil Bobinages rotoriques d ’une machine asynchrone mis en court-circuit = Cage d ’écureuil (Cu ou Al) barres court-circuitées par des anneaux aux extrémités coût réduit adaptation automatique au nombre de pôles du stator construction robuste
Notion de glissement (déjà introduite au cours précédent) On définit aussi le glissement, g , comme le rapport entre la fréquence électrique au rotor et la fréquence électrique au stator. Il existe une relation entre le glissement et la vitesse mécanique du rotor. En effet, on sait que l ’on a la relation ws = wr + p wm , où wm est la vitesse de rotation en radians par seconde. Dans l ’expression du glissement, on peut donc éliminer wr au profit de wm . En multipliant numérateur et dénominateur par p, on obtient aussi Le glissement est donc l ’écart relatif entre la vitesse de rotation mécanique et une vitesse ws / p que l ’on appelle la vitesse de synchronisme.
Circuit équivalent de référence La machine asynchrone étant un cas particulier de machine à champ tournant et pôles lisses, on peut repartir du circuit présenté dans les transparents du cours précédent. Il suffit d ’y court-circuiter le rotor (Ur = 0) . On notera aussi que wr / ws = g n ’est autre que le glissement et qu ’il faut changer le sens de référence de
Circuit équivalent de référence (suite) Nous verrons plus loin que, en fonctionnement normal, les pertes magnétiques rotoriques sont normalement négligeables. Le circuit équivalent d ’une machine asynchrone devient donc On notera que la résistance de pertes magnétiques Rpm ne modélise que les pertes magnétiques statoriques.
Circuit équivalent de référence (suite) On peut ramener les deux éléments restant à droite au stator. L’inductance série se transforme comme si elle traversait un transfo idéal. La résistance est divisée par le rapport des fréquences ! On obtient ainsi L ’élément de droite a un accès en court-circuit. Ses tensions sont nulles et on peut donc le remplacer par un court-circuit.
Circuit équivalent de référence Finalement, on obtient donc
Circuit équivalent simplifié Comme dans le cas du transformateur, ce circuit équivalent en « T » peut être remplacé par un circuit équivalent simplifié. Dans le cas linéaire, cela peut se faire sans introduire d’approximations, mais il faut alors introduire un transformateur à rapport de transformation complexe (que l’on peut prendre de module égal à 1 puisque l’on peut éliminer facilement un transformateur de rapport réel). Figure à faire au cours
Diagramme phasoriel Partant d’un vecteur censé représenter , on construit le diagramme de proche en proche. A noter que le courant magnétisant n ’est perpendiculaire à que si on néglige Rpm En utilisant ce diagramme, on peut montrer géométriquement une relation utile pour la suite, à savoir Cette relation est en fait valable pour toutes les machines à champ tournant !
Expressions du couple On a vu au cours précédent Cette formule, valable pour toutes les machines à champ tournant, peut s ’interpréter physiquement en notant que 3 I ’r E cos y est la puissance transmise du stator vers le rotor (à travers l ’entrefer). On peut comprendre cette puissance comme le produit du couple transmis par le champ magnétique, soit Cem et de la vitesse angulaire de ce champ, soit ws /p !
Expressions du couple Dans le cas d ’une machine asynchrone, on a la relation La formule vue à la dia précédente peut donc s ’écrire Cette formule est facile à retrouver en utilisant la conservation de l’énergie : la seule puissance entrante qui n’est pas transformée en chaleur dans Rs ou Rr est celle qui est fournie à R’r (1-g)/g, soit 3 R’r [(1-g)/g]I’r2 . Il suffit de diviser cette puissance par la vitesse de rotation mécanique, soit ws (1-g)/p , pour obtenir l’expression du couple. L ’expression du couple peut encore s ’écrire en fonction de E . En utilisant on obtient
Circuit équivalent (un peu) simplifié Comme dans le cas du transformateur, on cherche à regrouper les éléments série. Cela pose un problème de précision plus grand que dans le cas du transformateur parce que l ’inductance de magnétisation est plus faible, compte tenu de la présence de l ’entrefer. Il faut donc redéfinir les paramètres. Cela ne pose pas de difficulté en ce qui concerne le regroupement des inductances série, car la manipulation ne fait intervenir que des inductances (on considère que Rpm ne perturbe pas trop la transformation) de sorte que la nature des éléments n ’est pas modifiée. On obtient ainsi un circuit équivalent intéressant pour interpréter les essais de laboratoire.
Circuit équivalent (un peu) simplifié (suite) On peut scinder la résistance R ’r / g en deux parties, l ’une décrivant les pertes ohmiques au rotor et l ’autre la conversion d ’énergie.
Circuit équivalent (très) simplifié On peut simplifier l ’avantage le circuit équivalent en déplaçant la résistance R Cette transformation nécessiterait pour être rigoureuse l ’introduction d ’un déphaseur dans le circuit équivalent. Si on accepte que les résultats ne soient plus que qualitatif, on n ’introduit pas ce déphaseur et on obtient les circuits ci-dessous.
Expression approchée du couple En utilisant le circuit équivalent (très) simplifié, on peut obtenir pour le couple une expression approchée plus facile à traiter car faisant intervenir la tension statorique au lieu de la tension E . Soit, en multipliant le numérateur et le dénominateur par g2 ,
Maximum de couple En dérivant cette expression par rapport à g et cherchant la valeur de g qui annule la dérivée obtenue, on obtient La position du couple maximum dépend de R’r , mais pas sa valeur ! Ces formules peuvent s ’interpréter physiquement en considérant que le maximum de couple est obtenu lorsque la puissance transférée du stator au rotor, donc la puissance correspondant à R ’r / g , est maximum. Ce résultat s ’obtient à l ’adaptation des impédances, donc lorsque
Caractéristique couple-glissement b:
Couple-vitesse a: b:
Diagramme circulaire des courants Donc, le lieu de la tension est un cercle. Le lieu du courant est aussi un cercle.
Diagramme circulaire (suite) L ’obtention de diagrammes circulaires est en fait caractéristique des circuits électriques linéaires. Donc, à condition de ne pas considérer la non linéarité des éléments parallèle, le circuit de référence doit aussi donner lieu à un diagramme circulaire : il n ’était pas nécessaire de faire appel au circuit équivalent simplifié. Le cercle obtenu est un peu surélevé (à cause de la résistance de pertes magnétiques) et incliné (à cause du déphasage introduit par Rs et Lm , c’est-à-dire l’argument du transformateur idéal à rapport complexe !).
Diagramme circulaire (suite) On sait que la puissance complexe vaut Donc, puisque l’on étudie le fonctionnement à tension d’alimentation Us constante, si le lieu du courant est un cercle, il en est de même du lieu de la puissance complexe. Le diagramme circulaire peut donc prendre la forme d’un diagramme P-Q .
Equations déduites d’un modèle circuit (pas vu en 2010) Le rotor comporte un grand nombre de « phases ». Pour conserver les formules vues au cours précédent, on considère un système triphasé équivalent. La deuxième équation (équation électrique du rotor) peut s ’écrire Pour la simplifier, on définit Attention ! On a changé le signe (donc le sens de référence) du courant par rapport à la semaine passée.
Equations déduites d’un modèle circuit (suite) En utilisant les définitions des dias précédentes, on obtient La seconde peut encore s ’écrire ou Ces équations correspondent au circuit équivalent ci-dessous.
Expressions du couple déduites d’un modèle circuit (pas vu en 2010) On a vu au cours précédent (en négligeant les pertes magnétiques) On peut transformer cette expression en utilisant la relation tirée de la dia précédente. On obtient Or donc Soit la formule que nous avions déjà obtenue par bilan d’énergie sur le circuit équivalent de référence !