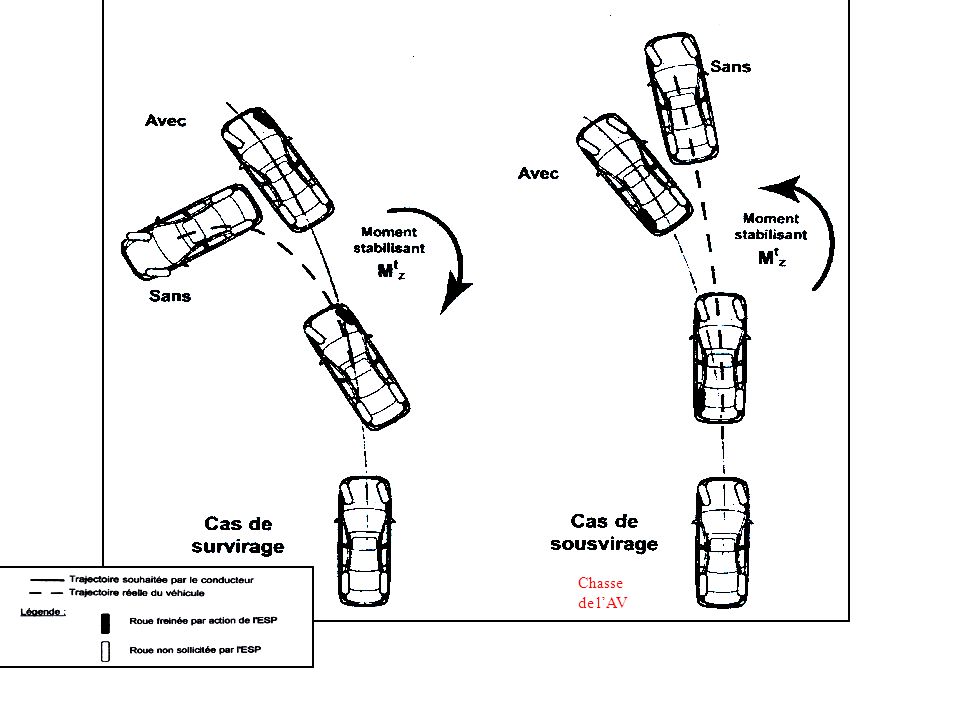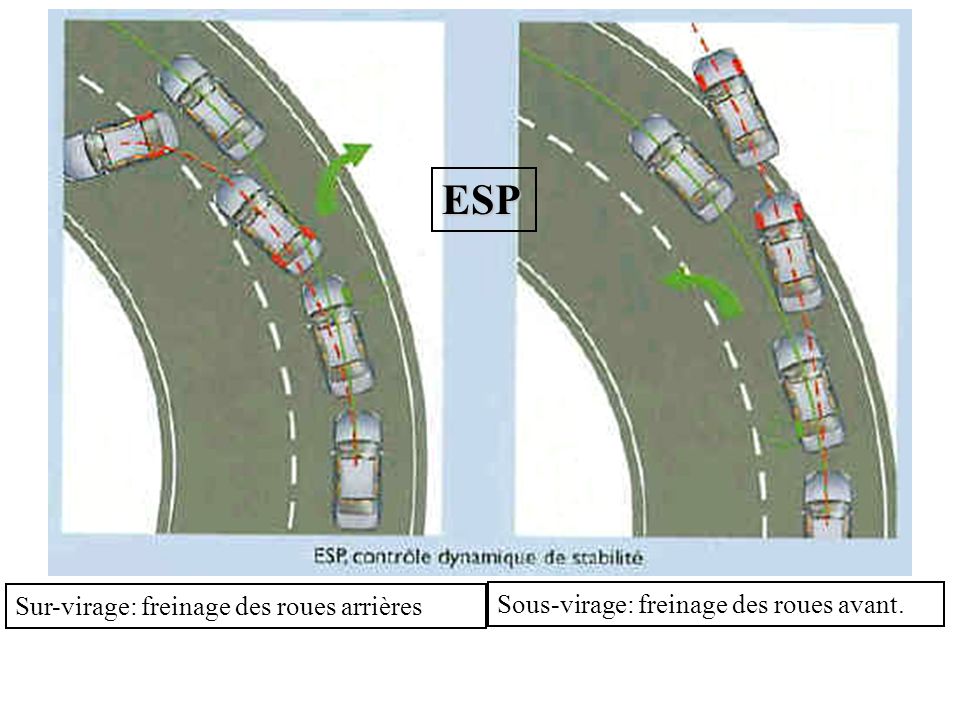
ESP Sur-virage: freinage des roues arrières Sous-virage: freinage des roues avant.
Chasse de l’AV
Nomenclature, les différentes liaisons
U = 0 à 5V 1ère 2ème
Analyse fonctionnelle Le système analyse en permanence deux paramètres : - l’angle de braquage : via un capteur d’angle volant, - la trajectoire réelle du véhicule : via un capteur d’accélération transversale et un capteur de vitesse de lacet. Direction choisie par le conducteur Où va le véhicule ? Trajectoire avant la plaque de verglas Trajectoire après la plaque de verglas Calcul de l’intension du conducteur Trajectoire constatée Détection de l’écart de trajectoire Actions correctrices
1 Pédale de frein 2 Amplificateur de freinage 3 Maître cylindre et réservoir de liquide de frein 4 Circuit primaire 5 Circuit secondaire 6 Bloc hydraulique 7 Roue avant gauche 8 Roue arrière droite 9 Roue arrière gauche 10 Roue avant droite 11 Capteur de pression de frein a Électrovannes d’admission avant gauche/droite b Électrovannes d’admission arrière gauche/droite c Électrovannes d’échappement avant gauche/droite d Électrovannes d’échappement arrière gauche/droite e Accumulateurs basse pression f Pompe hydraulique g Moteur de pompe hydraulique h Clapets anti-retour i Électrovannes d’isolement k Électrovannes d’aspiration
FREINAGE Montée en pression M
Phase maintien de P° M
Phase chute de P° M
Phase chute de P° M
Phase régulation ESP
Phase régulation ESP M ROUE A RALENTIR
Phase régulation ESP M
Phase régulation ESP M
Phase régulation ESP M ROUE A RALENTIR
M