Télécharger la présentation
1
VARIATION DE VITESSE DES MOTEURS ASYNCHRONES
OBJECTIF : Identifier, choisir un modulateur pour moteur asynchrone triphasé

2
VARIATION DE VITESSE DES MOTEURS ASYNCHRONES
PLAN 1- HISTORIQUE : Évolution des systèmes de réglage de la vitesse 2- SOLUTIONS GÉNÉRALES à la variation de vitesse 3- ACTION SUR LE GLISSEMENT 4- ACTION SUR LA FRÉQUENCE 5- ACTION SUR LE N0MBRE DE PAIRES DE PÔLES 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

3
1- HISTORIQUE: Évolution des systèmes de réglage de la vitesse
Un seul moteur par atelier, transmission et adaptation de la vitesse par système poulies courroies. Un moteur par machine, réglage de la vitesse par - Variateur à friction - Variateur à engrenage Variateur électrique Avant l’ère de l’électronique, la machine à courant continu était la solution la plus couramment utilisée ( variation progressive) Groupe Ward Léonart M 3~ G = Problème :η= 0,8 x 0, x , = 0,512 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Groupe Ward Léonart. M. 3~ G. = Problème :η= 0,8 x 0,8 x 0,8 = 0, Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
4
1- HISTORIQUE: Évolution des systèmes de réglage de la vitesse
Variateurs électroniques Apparition vers les années 50 avec l’utilisation des composants électroniques d’abord le thyratron à gaz…. Maintenant GTO (thyristor blocable), IGBT (transistor à commande en tension) Variateur pour machines à courant continu (redresseurs statiques), puis variateurs pour machines alternatives (onduleurs). 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
, IGBT (transistor à commande en tension) Variateur pour machines à courant continu (redresseurs statiques), puis variateurs pour machines alternatives (onduleurs). 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
5
2- SOLUTIONS GENERALES à la variation
de vitesse 1- Caractéristique externe T/Tn=f(n) 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
6
Fonctionnement de base Moteur asynchrone
T/Tn n tr/mn 1 0,5 1,5 2 Fonctionnement de base Moteur asynchrone Tmoteur Trécepteur Vitesse de synchronisme n n=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

7
2- SOLUTIONS GENERALES à la variation
de vitesse 2- Évolution de la vitesse de rotation en fonction de la charge 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

8
Fonctionnement de base
Vitesse de synchronisme T/Tn Tmoteur n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur n n=1420tr/mn Fonctionnement de base 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

9
Fonctionnement de base
Vitesse de synchronisme T/Tn Tmoteur n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Fonctionnement de base n n=1420tr/mn n=1440tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

10
Fonctionnement de base Moteur asynchrone
T/Tn Tmoteur 2 1,5 Trécepteur 1 0,5 Vitesse de synchronisme n n tr/mn Δn= 20tr/mn n=1420tr/mn n=1440tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

11
2- SOLUTIONS GENERALES à la variation
de vitesse 2- Évolution de la vitesse de rotation en fonction de la charge Remarque: Dans cet exemple, pour une diminution de couple de 50% la vitesse ne baisse que de Δn/n= 20/1420 = soit 1,4% 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

12
Fonctionnement sous tension variable
2- SOLUTIONS GENERALES à la variation de vitesse Vitesse de synchronisme T/Tn Tmoteur n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur n Fonctionnement sous tension variable U1 n1=1425tr/mn 3- Évolution de la vitesse en fonction de l’amplitude de la tension d’alimentation U1 = 400V U2 = 360V U2 n2=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

13
2- SOLUTIONS GENERALES à la variation
de vitesse 3- Évolution de la vitesse en fonction de l’amplitude de la tension d’alimentation Remarque: Dans cet exemple, pour une diminution de tension de 10% la vitesse ne baisse que de Δn/n= 5/1425 = soit 0,35% CONCLUSION: Dans son fonctionnement de base, le moteur asynchrone est caractérisé par la faible variation de sa vitesse quand la tension d’alimentation varie. 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

14
2- SOLUTIONS GENERALES à la variation
de vitesse 4- Formules de base définissant la vitesse Vitesse de synchronisme (vitesse du champ tournant) ns vitesse de synchronisme : tr/s f fréquence: Hz p nombre de paires de pôles ns = f/p Fréquence de rotation n = ns(1-g) g glissement g = (ns-n)/ns n = f/p(1-g) 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 ns vitesse de synchronisme : tr/s. f fréquence: Hz. p nombre de paires de pôles. ns = f/p. Fréquence de rotation. n = ns(1-g) g glissement. g = (ns-n)/ns. n = f/p(1-g) 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
15
2- SOLUTIONS GENERALES à la variation
de vitesse 4- Formules de base définissant la vitesse Différentes possibilités d’action n = f/p(1-g) n = f/p(1-g) n = f/p(1-g) n = f/p(1-g) Fréquence Nombre de paires de pôles Glissement 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 n = f/p(1-g) n = f/p(1-g) n = f/p(1-g) Fréquence. Nombre de paires de pôles. Glissement. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
16
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 1- Principe Formule du couple T = K.V1² x R2 ωs R2² +gL2ωs² g Tmax = K.V1² 2L2ωs² Indépendant de R2 gTmax = R2 L2ωs Proportionnel à R2 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

17
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 2- Incidence sur la caractéristique Couple/Vitesse 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

18
Action sur le glissement
Vitesse de synchronisme T/Tn n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Action sur le glissement Tmax Rad2=5Ω Rad2=3Ω Rad2=0Ω Tmoteur 3 2 1 gTmax2=0,78 gTmax2=0,48 gTmax1=0,2 n g 1 0,75 0,5 0,25 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

19
Action sur le glissement
Vitesse de synchronisme T/Tn n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Action sur le glissement Tmax Rad2=5Ω Rad2=3Ω Rad2=0Ω Tmoteur 3 2 1 n n3=1200tr/mn n2=1380tr/mn n1=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

20
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 3- Étude du comportement du système lorsque le couple varie 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

21
Action sur le glissement
Vitesse de synchronisme T/Tn n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Action sur le glissement Tmax Rad2=5Ω Rad2=3Ω Rad2=0Ω Tmoteur 3 2 1 n n3=1200tr/mn n2=1380tr/mn n1=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

22
Action sur le glissement
Vitesse de synchronisme T/Tn n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Action sur le glissement Tmax Rad2=5Ω Rad2=0Ω Tmoteur 3 1 n n3=1200tr/mn n1=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

23
Action sur le glissement
Vitesse de synchronisme T/Tn n tr/mn Moteur asynchrone 1 0,5 1,5 2 Trécepteur Action sur le glissement Tmax Rad2=5Ω Rad2=0Ω Tmoteur 3 1 θ1 θ3 Δn2=75tr/mn Δn1=20tr/mn n n3=1200tr/mn n1=1420tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

24
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 3- Étude du comportement du système lorsque le couple varie Constatation : Pour une diminution du couple de 50%, dans le cas ou la vitesse d’origine est n1=1420tr/mn , l’augmentation de vitesse est Δn1=20tr/mn soit en valeur relative Δn1/n1=20/1420=0, Δn1/n1=1,4% dans le cas où la vitesse d’origine est n2=1200tr/mn, l’augmentation de vitesse est Δn2=75tr/mn soit en valeur relative Δn2/n2=75/1200=0, Δn2/n2=6,2% 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

25
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 3- Étude du comportement du système lorsque le couple varie Incidence sur la stabilité Plus la vitesse diminue, plus l’angle θ diminue, plus l’écart de vitesse Δn (Δn = ΔT cotangente θ) augmente, donc plus la stabilité diminue. Remarque Pour un écart de vitesse nul, l’angle θ idéal est θ=90° 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 augmente, donc plus la stabilité diminue. Remarque. Pour un écart de vitesse nul, l’angle θ idéal est. θ=90° 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
26
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 4- Solutions technologiques Rhéostat de glissement Inconvénient : Pertes importantes dans le rhéostat rendement faible 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

27
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 4- Solutions technologiques Variation du courant rotorique Variation de la résistance apparente du rotor par réglage de l’angle d’amorçage des thyristors 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

28
3- ACTION SUR LE GLISSEMENT
MOTEUR ASYNCHRONE Á ROTOR BOBINÉ 4- Solutions technologiques Cascade hyposynchrone La tension rotorique est redressée, filtrée puis ondulée pour être réinjectée au stator 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

29
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 1- Principe Formule du couple T = K.V1² x R2 ωs R2² +gL2ωs² g Tmax = K.V1² 2L2ωs² gTmax = R2 L2ωs 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

30
Inversement proportionnel à f
4- ACTION SUR LA FRÉQUENCE MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 1- Principe Formule du couple T = K.V1² x R2 2∏f R2² +gL2(2∏f)² g T = K.V1² x R2 ωs R2² +gL2ωs² g Tmax = K.V1² 2L2(2∏f)² Tmax = K.V1² 2L2ωs² Inversement proportionnel à f ² f T gTmax = R2 L2(2∏f) gTmax = R2 L2ωs Inversement proportionnel à f f gTmax 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
². g. T = K.V1² x R2. ωs R2² +gL2ωs². g. Tmax = K.V1². 2L2(2∏f)². Tmax = K.V1². 2L2ωs². Inversement proportionnel à f ². f T. gTmax = R2. L2(2∏f) gTmax = R2. L2ωs. Inversement proportionnel à f. f gTmax. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
31
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 2- Incidence sur la caractéristique Couple/Vitesse 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

32
Fonctionnement sous fréquence variable
T/Tn n tr/mn 1 0,5 1,5 2 Fonctionnement sous fréquence variable Moteur asynchrone 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

33
Fonctionnement sous fréquence variable
T/Tn n tr/mn 1 0,5 1,5 2 Fonctionnement sous fréquence variable Moteur asynchrone f1=50Hz f3=33,4Hz Tmoteur f2=66,7Hz F θ 3 1 θ 2 Trécepteur n3 n1 n2 n3=880tr/mn n1=1420tr/mn n2=1960tr/mn ns3=1000tr/mn ns1=15OOtr/mn ns2=2000tr/mn 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

34
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 3- Fonctionnement à couple constant Tmax = K.V1² 2L2(2∏f)² Tmax = K X V1² 2L2(2∏ )² f Pour obtenir un fonctionnement à couple constant, il suffit de maintenir le rapport V/f constant. L’organe essentiel de cette commande est le convertisseur qui transforme une énergie électrique à fréquence fixe en énergie électrique à fréquence variable. 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
². Tmax = K. X V1². 2L2(2∏ )² f. Pour obtenir un fonctionnement à couple constant, il suffit. de maintenir le rapport V/f constant. L’organe essentiel de cette commande est le convertisseur qui. transforme une énergie électrique à fréquence fixe en énergie. électrique à fréquence variable. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
35
Fonctionnement sous fréquence variable À V/f=cste (couple constant
Moteur asynchrone T/Tn f4=15,7Hz f3=33,4Hz f1=50Hz Tmoteur Tmax f2=66,7Hz 2 T=cste P=cste 4 3 1 2 1,5 Trécepteur 1 0,5 n4 n3 n1 n2 n tr/mn Tmax=cste jusqu’à f=fn puis fonctionnement à P=cste 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

36
Fonctionnement sous fréquence variable
V/f=cste T/Tn n tr/mn 1 0,5 1,5 2 Fonctionnement sous fréquence variable Moteur asynchrone f1=50Hz f3=33,4Hz Tmoteur f2=66,7Hz F θ 3 1 θ 2 Trécepteur n3 n1 n2 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

37
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 4- Combinaison d’un redresseur et d’un onduleur autonome -Principe -Remarque: Les courants générés ne sont pas de forme sinusoïdale ce qui entraîne des pertes supplémentaires dans le fer. Conséquence: Déclassement important de la machine U T OU 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

38
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) But: Obtenir une forme du courant la plus proche possible de la sinusoïde par décomposition de la tension. 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 But: Obtenir une forme du courant la plus proche. possible de la sinusoïde par décomposition de la. tension. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
39
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) Forme d’onde u i t 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Forme d’onde. u i. t. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
40
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) Relevés 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Relevés. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
41
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) Avantages: - Pertes plus faibles - Rotation harmonieuse du moteur - Déclassement inférieur à 5% Inconvénient: -Bruit électrique dans le moteur (fréquences de découpage audibles) 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Avantages: - Pertes plus faibles. - Rotation harmonieuse du moteur. - Déclassement inférieur à 5% Inconvénient: -Bruit électrique dans le moteur (fréquences de découpage. audibles) 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
42
4- ACTION SUR LA FRÉQUENCE
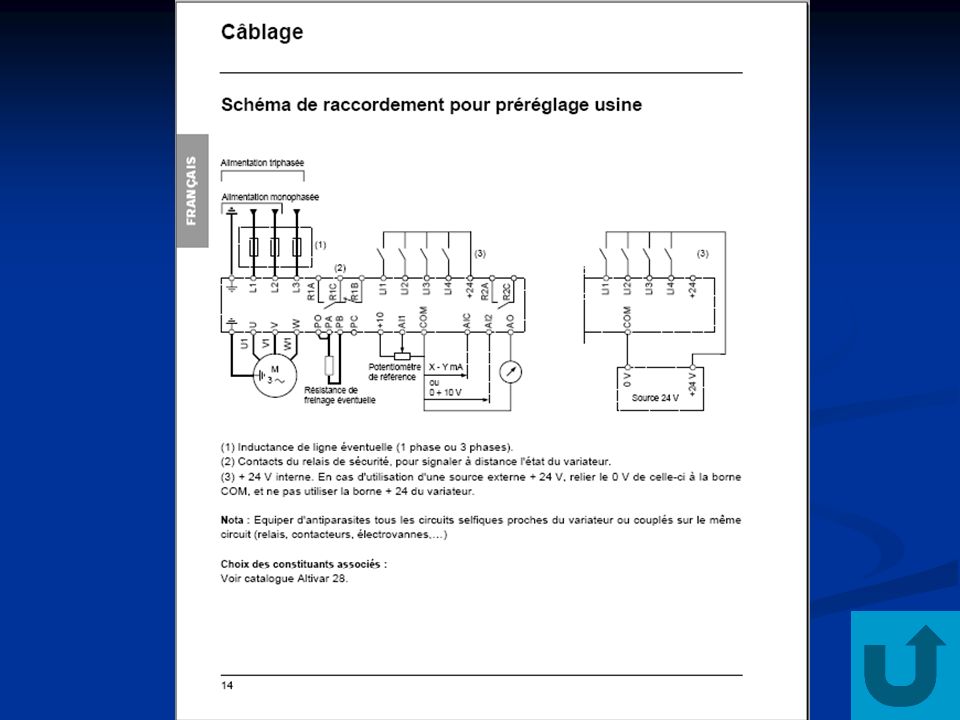
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) Réalisation: 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Réalisation: 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
43
4- ACTION SUR LA FRÉQUENCE
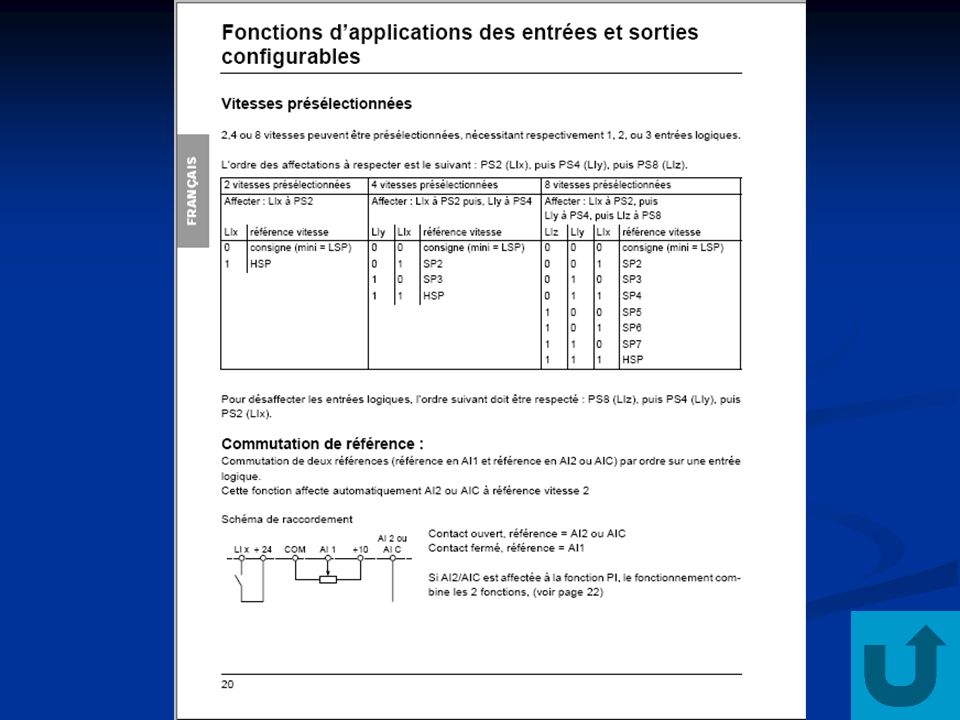
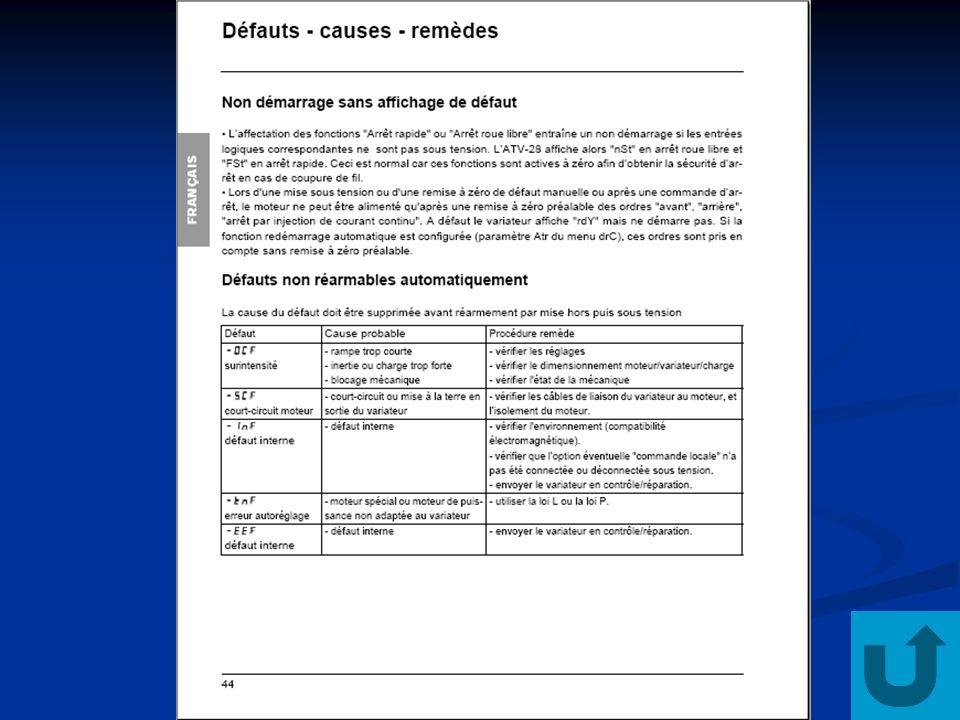
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Variation de fréquence avec Modulation de Largeur d’Impulsion (MLI) Exemple: ATV 28 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Exemple: ATV Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
44
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Contrôle vectoriel du flux But: Dissocier et gérer séparément le courant magnétisant et le courant actif du moteur asynchrone. le moteur asynchrone acquière les performances du moteur à courant continu sans ses inconvénients. Mas I actif et magnétisant Mcc I actif i magnétisant 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

45
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Contrôle vectoriel du flux Propriétés: - Montée en couple dix fois plus rapide - Couple nominal de l’arrêt à la vitesse nominale - Coût modulateur + moteur inférieur à celui d’un moteur à courant continu + modulateur Deux possibilités: - Boucle ouverte: le microprocesseur calcule par lecture du courant la position relative rotor/stator (pas de couple à l’arrêt) ex ATV28 - Boucle fermée: un codeur incrémental donne la position relative rotor/stator) ex VNTV - TGV 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 ex ATV28. - Boucle fermée: un codeur incrémental donne la position. relative rotor/stator) ex VNTV - TGV. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
46
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 5- Combinaison d’un redresseur et d’un onduleur autonome -Contrôle vectoriel du flux 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

47
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 6- Conversion directe : CYCLOCONVERTISSEUR Principe L’onde de tension de sortie est obtenue par juxtaposition de fragments de sinusoïdes successives empruntées aux diverses phases du réseau d’alimentation. U T OU T=cste 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

48
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 6- Conversion directe : CYCLOCONVERTISSEUR - Forme d’onde Onde souhaitée Onde obtenue Tensions réseau 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

49
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 6- Conversion directe : CYCLOCONVERTISSEUR - Schéma de principe 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

50
4- ACTION SUR LA FRÉQUENCE
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL 6- Conversion directe : CYCLOCONVERTISSEUR Caractéristiques Avantaqes: Conversion directe donc rendement élevé (~97%) Puissance jusqu’à 30Mw Couple important à basse vitesse Inconvénients: Nombre de thyristors important (36 en~) Fréquence limitée à 20Hz -Applications Broyeurs, laminoires, ensemble de moteurs 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 Puissance jusqu’à 30Mw. Couple important à basse vitesse. Inconvénients: Nombre de thyristors important (36 en~) Fréquence limitée à 20Hz. -Applications. Broyeurs, laminoires, ensemble de moteurs. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
51
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX
5- ACTION LE NBRE DE PAIRES DE PÔLES MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX 1- Moteur à couplage de pôles Principe : ce type de moteur possède 2 bobinages distincts par phase, qui peuvent être couplés en série (4 pôles) ou en parallèle (2 pôles). 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 ou en. parallèle (2 pôles). 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
52
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX
5- ACTION LE NBRE DE PAIRES DE PÔLES MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX 1- Moteur à couplage de pôles Couplage triangle-série / étoile-parallèle ( Dahlander) La puissance en Gv = 2x la puissance en Pv L2 L1 L3 U1 W2 V1 V2 W1 U2 L1 L2 L3 U2 W2 V2 U1 V1 W1 Gv Pv 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p
 La puissance en Gv = 2x la puissance en Pv. L2. L1. L3. U1. W2. V1. V2. W1. U2. L1. L2. L3. U2. W2. V2. U1. V1. W1. Gv. Pv. 1-Historique. 2-Solutions générales. 3-Action sur g. 4-Action sur f. 5-Action sur p.")
53
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX
5- ACTION LE NBRE DE PAIRES DE PÔLES MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX 1- Moteur à couplage de pôles Schéma de puissance 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

54
Couplage 1-Historique 2-Solutions générales 3-Action sur g
4-Action sur f 5-Action sur p

55
MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX
5- ACTION LE NBRE DE PAIRES DE PÔLES MOTEUR ASYNCHRONE Á CAGE D’ÉCUREUIL SPÉCIAUX 2- Moteur à enroulements indépendants Le stator de ces moteurs est constitué de plusieurs enroulements totalement indépendants. On considère chacun des enroulements comme appartenant à un moteur distinct. Exemple: paletticc Schéma de puissance 1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

56
1-Historique 2-Solutions générales 3-Action sur g 4-Action sur f 5-Action sur p

57
RÉSUMÉ

58
FIN









>")

















