Télécharger la présentation
1
NOUVEAUTES DES NORMES Bernard ANSELMETTI Septembre 2015

2
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

3
PROBLEMATIQUE Comment positionner le modèle nominal sur les surfaces réelles de la pièce ? Modèle Nominal (CAO) Eléments de référence Les surfaces nominales sont en positions relatives parfaites.

4
PROBLEMATIQUE Liaison avec jeu : Au maximum ou au minimum de matière, il faut que l'état virtuel soit respecté. Liaison avec serrage : Il faut un critère d'association La norme propose un critère par défaut qui ne convient pas toujours… Les projets de norme vont permettre d'imposer un critère d'association A[G] moindres carrés A[X] inscrit A[N] circonscrit A[CE] Chebychev extérieur matière = minimax Qui choisit ? (concepteur ou métrologue) Quel critère faut-il choisir ?
 Quel critère faut-il choisir")
5
SITUATION ACTUELLE La question ne se pose que pour les liaisons sans jeu, référence sans ou . EXTRAIT 5459:2011 annexe A

6
CRITERE D'ASSOCIATION D'UNE REFERENCE SIMPLE
Sur des surfaces de bonne qualité, les surfaces associées sont assez proches quel que soit le critère, en comparant effectivement des surfaces "extérieures matière" ou "centrées". (ex : on a un écart de 2mm entre les axes aux extrémités d'un cylindre obtenue en tournage) Moindres carrés Minimax Rmini r = 2mm Minimax Moindres carrés Tangent 3mm La différence se fait sur les cylindres coaxiaux ou parallèles
 Moindres carrés. Minimax. Rmini. r = 2mm. Minimax. Moindres carrés. Tangent. 3mm. La différence se fait sur les cylindres coaxiaux ou parallèles.")
7
APPLICATIONS DONNEES PAR LA NORME
«minmax» à rayons différents éléments associés: avec diamètres variables, contrainte d'orientation (parallélisme) et contrainte de position Critère non précisé, mais seul minimax possible si diamètres variables => Le critère par défaut donné dans le tableau n'est pas applicable dès qu'il y a plusieurs cylindres
 et contrainte de position. Critère non précisé, mais seul minimax possible si diamètres variables. => Le critère par défaut donné dans le tableau n est pas applicable dès qu il y a plusieurs cylindres.")
8
NOTE DE LA NORME Lorsque la taille linéaire (de l'entité dimensionnelle) est considérée comme variable, le résultat de l'association peut donner lieu à plusieurs solutions avec le même élément de référence spécifiée («association instable»). Dans ce cas, le critère d'association complémentaire suivant doit être utilisé: minimiser la distance maximale, prise normalement à l'élément associé, entre l'élément associé et l'élément de référence ou entre les deux éléments associés et les deux éléments de référence spécifiée (cas de deux plans parallèles). Cas du cylindre circonscrit à un arbre Distance maxi très importante Problème d'optimisation : lorsque le diamètre est minimal, il n'y a plus de mobilité pour déplacer le cylindre associé de diamètre mini…sans augmenter le diamètre => le premier critère est inutile Distance maxi équilibrées Impossible à faire
 est considérée comme variable, le résultat de l association peut donner lieu à plusieurs solutions avec le même élément de référence spécifiée («association instable»). Dans ce cas, le critère d association complémentaire suivant doit être utilisé: minimiser la distance maximale, prise normalement à l élément associé, entre l élément associé et l élément de référence ou entre les deux éléments associés et les deux éléments de référence spécifiée (cas de deux plans parallèles). Cas du cylindre circonscrit à un arbre. Distance maxi très. importante. Problème d optimisation : lorsque le diamètre est minimal, il n y a plus de mobilité pour déplacer le cylindre associé de diamètre mini…sans augmenter le diamètre => le premier critère est inutile. Distance maxi. équilibrées. Impossible à faire.")
9
ATTENTION AUX AUTRES CRITERES !
Le concepteur pourrait imposer un autre critère dans le système de références. Æ 0,05 A[C] Ajout d'un point [N] CIRCONSCRIT ou [X] INSCRIT L'orientation dépend de la position des points palpés. [CE] Chebychev tangent Impossible d'être tangent extérieur matière si la pièce est fermée. Impossible d'être extérieur matière partout [C] Chebychev La surface nominale peut être contrainte par un défaut local. Position indéterminée Distances maxi

10
SERRAGE ENTRE 2 PLANS Que se passe t-il avec une bosse ?
Support infiniment rigide Bloc étudié (compressible) zs zb Mi(xi,yi,zi) Chaque surface élémentaire en Mi du bloc subit une compression qui génère un effort Fi dirigé vers l'intérieur de la pièce. ys y1 yb xb 2R xs Fi Que se passe t-il avec une bosse ? zb yb On cherche la position d'équilibre statique. Les points Mi du bloc ont pour coordonnées (xi,yi,zi) dans le repère b. Dans le repère s de la pièce support, on a : z'i = zi + w + a.yi – b.xi zs ys xb xs Aire Si Fi Mi(xi,yi,z'i) Sur la face supérieure, la compression est z'i - R. L'effort appliqué est Fi = k.si.(R-z'i) z R Plan xy R Fi Sur la face inférieure, la compression est -z'i - R. L'effort appliqué est Fi = -k.si.(R+z'i) z Mi(xi,yi,z'i) Aire Si
 zs. zb. Mi(xi,yi,zi) Chaque surface élémentaire en Mi du bloc subit une compression qui génère un effort Fi dirigé vers l intérieur de la pièce. ys. y1. yb. xb. 2R. xs. Fi. Que se passe t-il avec une bosse zb. yb. On cherche la position d équilibre statique. Les points Mi du bloc ont pour coordonnées (xi,yi,zi) dans le repère b. Dans le repère s de la pièce support, on a : z i = zi + w + a.yi – b.xi. zs. ys. xb. xs. Aire Si. Fi. Mi(xi,yi,z i) Sur la face supérieure, la compression est z i - R. L effort appliqué est Fi = k.si.(R-z i) z. R. Plan xy. R. Fi. Sur la face inférieure, la compression est -z i - R. L effort appliqué est Fi = -k.si.(R+z i) z. Mi(xi,yi,z i) Aire Si.")
11
EQUILIBRE STATIQUE L'équilibre est assuré si :
Moment en x =- k.[ S si.(xi .yi) + w. S si.yi + a. S si.yi² - b. S (si.xi.yi)] = 0 Moment en y =- k.[ S si.(xi .xi) + w. S si.xi + a. S (si.xi.yi) - b. S si.xi²] = 0 Résultante en z = - k.[ S si.(xi) + w. S si + a. S si.yi - b. S si.xi] = 0 La position est indépendante de la raideur k. Si la densité de points est constante, l'aire de la surface élémentaire si est la même pour tous les points. Le système d'équation devient : S (xi .yi) + w. S yi + a. S yi² - b. S (xi.yi)= 0 S (xi .xi) + w. S xi + a. S (xi.yi) - b. S xi²= 0 S (xi) + w. S si + a. S yi - b. S xi = 0 Avec S (xi) = S (zi- R) + S (zi +R) = S zi + (ninf – nsup) R S (xi .yi) = S (zi) + R (S yi - S yi ) Sup Inf Inf Sup =0 si les points sont face à face => Résultat indépendant de R Si les palpages sont aux mêmes points sur les 2 plans, la solution correspond exactement à la méthode des moindres carrés et est indépendante de la largeur nominale (R).
 + w. S si.yi + a. S si.yi² - b. S (si.xi.yi)] = 0. Moment en y =- k.[ S si.(xi .xi) + w. S si.xi + a. S (si.xi.yi) - b. S si.xi²] = 0. Résultante en z = - k.[ S si.(xi) + w. S si + a. S si.yi - b. S si.xi] = 0. La position est indépendante de la raideur k. Si la densité de points est constante, l aire de la surface élémentaire si est la même pour tous les points. Le système d équation devient : S (xi .yi) + w. S yi + a. S yi² - b. S (xi.yi)= 0. S (xi .xi) + w. S xi + a. S (xi.yi) - b. S xi²= 0. S (xi) + w. S si + a. S yi - b. S xi = 0. Avec S (xi) = S (zi- R) + S (zi +R) = S zi + (ninf – nsup) R. S (xi .yi) = S (zi) + R (S yi - S yi ) Sup. Inf. Inf. Sup. =0 si les points sont face à face. => Résultat indépendant de R. Si les palpages sont aux mêmes points sur les 2 plans, la solution correspond exactement à la méthode des moindres carrés et est indépendante de la largeur nominale (R).")
12
PRECONISATION Partager la surface en zones de même aire et palper un point au centre de chaque zone. Pour deux plans face à face avec des contours différents et/ou des palpages quelconques, il faudrait appliquer les relations complètes : S si.(xi .yi) + w. S si.yi + a. S si.yi² - b. S (si.xi.yi) = 0 S si.(xi .xi) + w. S si.xi + a. S (si.xi.yi) - b. S si.xi² = 0 S si.(xi) + w. S si + a. S si.yi - b. S si.xi = 0 L'aire si de chaque petit élément de surface autour de chaque point peut être donné par l'algorithme de Voronoi (faces élémentaires limitées par les médiatrices avec des points voisins)
 + w. S si.yi + a. S si.yi² - b. S (si.xi.yi) = 0. S si.(xi .xi) + w. S si.xi + a. S (si.xi.yi) - b. S si.xi² = 0. S si.(xi) + w. S si + a. S si.yi - b. S si.xi = 0. L aire si de chaque petit élément de surface autour de chaque point peut être donné par l algorithme de Voronoi (faces élémentaires limitées par les médiatrices avec des points voisins)")
13
ASSOCIATION MOINDRES CARRES
Critère le plus pratiqué (et souvent le seul disponible sur les machines). Certifiable. Théoriquement, ce critère n'est pas satisfaisant, car le résultat dépend de la répartition des points sur la surface (une surdensification "tire" la surface associée) => prélèvement uniforme. Correspond bien à une liaison avec serrage .
. Certifiable. Théoriquement, ce critère n est pas satisfaisant, car le résultat dépend de la répartition des points sur la surface (une surdensification tire la surface associée) => prélèvement uniforme. Correspond bien à une liaison avec serrage .")
14
PRECONISATION Liaison "surfacique" Autres cas
Critère d'association Chebychev tangent extérieur matière [CO] pour minimiser la distance maxi. Critère d'association des moindres carrés [G] (sans contrait de tangence). Surface fermée Contact plan ou surface "tendue" (si toute les normales sont comprises dans un cône d'angle 30°). 30° Surface bilatérale Surface gauche Pour un cylindre, le résultat est théorique indépendant du rayon si la densité est uniforme. Il est cependant possible de faire varier les rayons pour minimiser les écarts et être moins sensible aux variations de densité.
. Surface fermée. Contact plan ou surface tendue (si toute les normales sont comprises dans un cône d angle 30°). 30° Surface bilatérale. Surface gauche. Pour un cylindre, le résultat est théorique indépendant du rayon si la densité est uniforme. Il est cependant possible de faire varier les rayons pour minimiser les écarts et être moins sensible aux variations de densité.")
15
ECRITURE RECOMMANDEE DU SYSTÈME DE REFERENCES
Possible dans un futur proche ! Surface tendue 0,5 Surface nominale minimax extérieure matière A 0,5 A 0,5 A[CO] (CO par défaut) Surface fermée Surface nominale des moindres carrés Æ 0,1 A A 0,5 Æ 0,1 A A[GM] Surface nominale des moindres carrés A
 Surface fermée. Surface nominale des moindres carrés. Æ 0,1. A. A. 0,5. Æ 0,1. A. A[GM] Surface nominale des moindres carrés. A.")
16
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

17
PROBLEMATIQUE La norme ISO 5459 : 2011 "impose" de filtrer les éléments de références selon un processus par défaut 0,2 A Le projet de norme ISO va permettre d'imposer le critère de filtrage Le projet de norme ISO 5459 va permettre d'imposer le critère de filtrage

18
FILTRAGE DE L'ELEMENT DE REFERENCE
Extrait 5459:2011 Le filtrage doit retenir les points les plus hauts de l'élément intégral réel. Pour un élément nominal plat ou convexe, tel qu'un arbre, le filtrage doit résulter en un élément convexe (voir Figure A.2). Pour les autres types d'élément nominal, tel qu'un alésage, les cavités de surface doivent être supprimées de façon similaire (voir Figure A.3). Le filtrage n'est pas défini autrement dans la présente Norme internationale. NOTE Il est prévu de fournir plus de détails sur le filtrage dans une prochaine version de la présente Norme internationale. arbre Le filtrage n'est pas symétrique Il modifie la forme de la pièce et la densité de points Incompatible avec les moindres carrés Non certifiable => A éviter impérativement Après filtrage
. Pour les autres types d élément nominal, tel qu un alésage, les cavités de surface doivent être supprimées de façon similaire. (voir Figure A.3). Le filtrage n est pas défini autrement dans la présente Norme internationale. NOTE Il est prévu de fournir plus de détails sur le filtrage dans une prochaine version de la présente Norme internationale. arbre. Le filtrage n est pas symétrique. Il modifie la forme de la pièce et la densité de points. Incompatible avec les moindres carrés. Non certifiable. => A éviter impérativement. Après filtrage.")
19
FILTRAGE DE L'ELEMENT SPECIFIE
Exemple du projet de norme ISO 1101 Filtre tangent extérieur matière

20
EXEMPLE : FILTRAGE D'UN PLAN
Après filtrage Creux Comment définir et valider l'algorithme de filtrage sur tous les types de surface ? Après filtrage, la densité n'est plus uniforme…

21
PRECONISATION Ces normes sont publiées de façon prématurée.
Elles ne sont pas applicables. Seule solution actuelle : filtrage "indéterminé" Filtrage "naturel" du moyen de mesure => incertitude de mesure

22
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

23
PROBLEMATIQUE 0,1 A B 10 47 Cale R25 Distance maxi
0,2 A B L'orientation est assurée par la vis, indépendamment de la position du plan 10 47 Cale R25 A1 0,05 70°x45 A1 A Distance maxi Plan minimax extérieur matière parallèle à A 10 Le plan minimax ne peut pas respecter la cote encadrée 25 Secteur cylindrique d'angle 70° de rayon nominal 25 des moindres carrés à la surface réelle

24
PROBLEMATIQUE Le cylindre tertiaire doit-il être associé en imposant la distance nominale ou pas ? PL2 PL1 (a) (b) B C PL3 A Ym C YN Xm XN Om ON B A L Æ 0,05 A A B C Repère "CAO" T La réponse dépend de la pièce en vis-à-vis il est impossible de prendre la décision les normes "hésitent" sur la définition par défaut
 (b) B. C. PL3. A. Ym. C. YN. Xm. XN. Om. ON. B. A. L. Æ 0,05. A. A B C. Repère CAO T. La réponse dépend de la pièce en vis-à-vis. il est impossible de prendre la décision. les normes hésitent sur la définition par défaut.")
25
CONTRAINTE DE DISTANCE SUR LES ENTRAXES
La pièce en appui est rigide. Les écarts d'entraxes donnent des contraintes non uniformes => Distance fixe. Le carter "creux" se déforme, le serrage sera sur tout le pion. Un écart d'entraxe de faible amplitude est admissible. L'orientation est indépendante de l'entraxe => Distance variable La pièce est reliée à 2 bras articulés. Les axes doivent être parallèles, sans contraintes de distance. L'orientation est indépendante de l'entraxe => Distance variable La pièce en appui possède une lumière. La zone de contact doit être perpendiculaire. => Distance variable Contact sur zones partielles

26
DOMAINE D'EMPLOI Il y a très peu de cas d'utilisation d'une référence sur un groupe de trous sans modificateur : s'il y a du jeu, la référence est le plus souvent au minimum de matière ou au maximum de matière pour une fonction assemblage pour des pions serrés qui seront assemblés dans la pièce voisine avec du jeu, la référence doit être définie sur la projection des trous. jeu serrage Si l'une des deux pièces est déformable avec une déformation symétrique, les pièces sont auto-centrées. serrage

27
INSTABILITE DES NORMES
Les anciennes normes AFNOR NFE : 1988 § 5.1 (référence et système de référence) et E §4.5 (établissement des références spécifiées) précisaient " les éléments géométriques constituant un système de référence sont en position exacte les unes par rapport aux autres". Cette précision n'existe pas dans la norme ISO correspondante, ce qui laissait un doute (aucune mention ne contredisait la contrainte de position).. La nouvelle norme ISO 5459:2011 dit : Paragraphe : "Les éléments associés pour établir le système de références spécifiées sont obtenus successivement, dans l'ordre défini par la spécification géométrique. L'orientation relative des surfaces associées est théoriquement exacte mais leur position relative est variable." Cela signifie que la distance entre les références primaire, secondaire et/ou tertiaire est libre. Plusieurs constructions "classiques" sont devenues impossibles ou entachées d'une grosse incertitude, ce qui impose des constructions "hors normes" avec des commentaires. Par contre, la norme 2692 sur le maximum de matière semble confirmer le respect de la distance entre les références. Ces 2 normes n'appliquent pas la même règle !
 et E §4.5 (établissement des références spécifiées) précisaient les éléments géométriques constituant un système de référence sont en position exacte les unes par rapport aux autres . Cette précision n existe pas dans la norme ISO correspondante, ce qui laissait un doute (aucune mention ne contredisait la contrainte de position).. La nouvelle norme ISO 5459:2011 dit : Paragraphe : Les éléments associés pour établir le système de références spécifiées sont obtenus successivement, dans l ordre défini par la spécification géométrique. L orientation relative des surfaces associées est théoriquement exacte mais leur position relative est variable. Cela signifie que la distance entre les références primaire, secondaire et/ou tertiaire est libre. Plusieurs constructions classiques sont devenues impossibles ou entachées d une grosse incertitude, ce qui impose des constructions hors normes avec des commentaires. Par contre, la norme 2692 sur le maximum de matière semble confirmer le respect de la distance entre les références. Ces 2 normes n appliquent pas la même règle !")
28
CAS MIXTE B non positionné par rapport à A
Æ 0,2 A B C L C positionné par rapport à A et/ou B B positionné par rapport à A Æ 0,2 A B C L C non positionné par rapport à A et B

29
EVOLUTION DES NORMES EN ASME : la distance est imposée par défaut.
Le modificateur libérer la distance 0,1 A B B 47 ! NORME ASME A Le projet 5459 prévoit que par défaut, la distance est variable et un modificateur [DF] pour indiquer que la distance est fixe. Par contre au maximum de matière, il n'y a pas d'indication dans la 2692.

30
DEFINITION ACTUELLE Définition du repère par défaut sans contrainte de position 40 Æ 0,2 A B C Signification actuelle ( ) 25 A (3) C B 70 A B C [DF] Æ 0,2 En projet : Distance fixe
 25. A. (3) C. B. 70. A B C [DF] Æ 0,2. En projet : Distance fixe.")
31
PLAN / CENTREUR / RAINURE
A confirmer dans les futures 2692 Le problème ne se pose pas avec un modificateur 40 Æ 0,2 A B C L L A 25 (3) C B 70
 C. B. 70.")
32
EXEMPLE SANS SOLUTION DIRECTE
A B B B1,2 B B2 0,05 A B B1 A A B devient le point milieu de B1 et B2. Sans la contrainte de distance entre B et A Avec la contrainte de distance entre B et A B B A A = =

33
SYSTEME DE REFERENCES CYLINDRE / SPHERE
J mini 0,05 Æ12±0,05 (1) 0,5 A L Ø0,05 B B est une sphère de rayon 30 minimax extérieure matière à la surface réelle. R30 (2) A 0,05 A B L 80 Variante : Cette suppression de la contrainte de position traduit la mobilité radiale de la rondelle concave par rapport à A. B est une sphère de rayon 30, centrée sur l'état virtuel au mini matière de A (Ø11,95), minimax extérieure matière à la surface réelle.
 0,5 A. L. Ø0,05 B. B est une sphère de rayon 30 minimax extérieure matière à la surface réelle. R30. (2) A. 0,05 A B. L. 80. Variante : Cette suppression de la contrainte de position traduit la mobilité radiale de la rondelle concave par rapport à A. B est une sphère de rayon 30, centrée sur l état virtuel au mini matière de A (Ø11,95), minimax extérieure matière à la surface réelle.")
34
REFERENCE COMMUNE SUR 2 TROUS A DISTANCE VARIABLE
Dans le cas d'une pièce déformable symétrique, le modificateur [DV] libère la contrainte de distance entre les deux axes des cylindres associés. Ø7,96±0,02 Ø7,96±0,02 A UNIQUEMENT DANS LE CAS DE 2 TROUS, B et C sont 2 cylindres perpendiculaires à A, des moindres carrés à chaque alésage, sans contrainte de distance. (les diamètres des cylindres associés sont indépendants). Le modèle nominal est positionné sur A, et dans le plan formé par B-C avec un centrage au milieu de B et C. B C 80 Ø0,1 A A (B-C) [DV] référence Alésages réels y (Les axes de B et C peuvent être déterminés séparément). Les rayons ne sont pas contraints à être identiques même si les diamètres spécifiés sont identiques. x 80
. Le modèle nominal est positionné sur A, et dans le plan formé par B-C avec un centrage au milieu de B et C. B. C. 80. Ø0,1. A. A (B-C) [DV] référence. Alésages réels. y. (Les axes de B et C peuvent être déterminés séparément). Les rayons ne sont pas contraints à être identiques même si les diamètres spécifiés sont identiques. x. 80.")
35
LIMITATION DU [DV] Problème : où fixer l'origine pour positionner l'élément spécifié s'il y a plusieurs références en position indéterminée ? Le [DV] ne peut être appliqué que si les éléments de référence définissent un plan de symétrie et un centre. Conseil : limiter à 2 alésages parallèles de même diamètre. Remarque : un centrage par 3 pions serrés ou 3 roulements est très rare…
![LIMITATION DU [DV] Problème : où fixer l origine pour positionner l élément spécifié s il y a plusieurs références en position indéterminée](http://slideplayer.fr/slide/10467028/33/images/35/LIMITATION+DU+%5BDV%5D+Probl%C3%A8me+%3A+o%C3%B9+fixer+l+origine+pour+positionner+l+%C3%A9l%C3%A9ment+sp%C3%A9cifi%C3%A9+s+il+y+a+plusieurs+r%C3%A9f%C3%A9rences+en+position+ind%C3%A9termin%C3%A9e.jpg "Le [DV] ne peut être appliqué que si les éléments de référence définissent un plan de symétrie et un centre. Conseil : limiter à 2 alésages parallèles de même diamètre. Remarque : un centrage par 3 pions serrés ou 3 roulements est très rare…")
36
REFERENCE EN ORIENTATION SEULEMENT ><
La bague est rectifiée pour avoir un jeu axial J de 0,03 Embout Bague Arbre L maxi J =0,03 Carter B 0,05 A >< B A A plan minimax B plan parallèle à A tangent. Plan primaire orientant Centrage secondaire

37
CONTRAINTE D'ORIENTATION SEULEMENT
Le symbole >< n'impose que la contrainte d'orientation pour les références suivantes. 0,05 A >< B Zone de tolérance B1 50 50 50 B B1 B z 4,5 x 1 2 3 30 A A Origine pièce Origine programme (locale)
")
38
MODIFICATEUR ><
(b) Æ 0,05 A A >< B>< C D E E (1) 20 20 (2) D A B C Æ 0,05 A = = B 6 4,5 2 3 A 1 C B initial Le modèle nominal est centré sur D, avec B parallèle à B initial et C tangent à la surface réelle. B B Translation C C
 Æ 0,05. A. A >< B>< C D E. E. (1) (2) D. A B C. Æ 0,05. A. = = B. 6. 4, A. 1. C. B. initial. Le modèle nominal est centré sur D, avec B parallèle à B initial et C tangent à la surface réelle. B. B. Translation. C. C.")
39
MOBILITE D'UNE SURFACE QUELCONQUE
3x (1) 0,5 CZ A B 0,2 CZ >< A B (2) B A 0,5 CZ A B (1) 0,2 CZ >< A B (2) B B A A 0,2 CZ A>< B (3) 0,2 CZ A B>< (4) B B A A
 0,5 CZ A B. 0,2 CZ >< A B. (2) B. A. 0,5 CZ A B. (1) 0,2 CZ >< A B. (2) B. B. A. A. 0,2 CZ A>< B. (3) 0,2 CZ A B>< (4) B. B. A. A.")
40
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

41
PROBLEMATIQUE La référence bloque en principe tous les degrés de liberté correspondant à la classe de surface. L'élément de situation permet de limiter les degrés de liberté : 0,4 A[PL] B L La surface nominale est associée à la surface réelle A. Le plan A[PL] est défini par rapport à la surface nominale. Le système de référence est construit avec le plan A[PL] primaire. Les éléments de situations sont : Le plan [PL] La droite [SL] Le point [PT]

42
SYSTÈME DE REFERENCES Cette pièce est en appui sur deux petits plans. Les 2 centres instantanés de rotation sont quasi confondus. La liaison est équivalente à une cylindrique définie sur la droite intersection de 2 plans distants du 20mm des faces (axe du cylindre bitangent au milieu des faces). B Æ 0,2 A A[SL] B A est une seule surface non tendue. La référence spécifiée est définie dans un premier temps par 2 plans perpendiculaires des moindres carrés aux 2 plans réels. A[SL] est la droite intersection de 2 plans décalés de 20mm par rapport à ses plans de référence spécifiés(*). B est ensuite le plan médian de 2 plans parallèles, centrés sur cette droite et distants de la cote nominale , qui minimise la somme des carrés des écarts. 20 20 A[SL] 0,05 CZ A (*) la référence spécifiée est assez instable, mais la droite est très stable.
. B. Æ 0,2. A. A[SL] B. A est une seule surface non tendue. La référence spécifiée est définie dans un premier temps par 2 plans perpendiculaires des moindres carrés aux 2 plans réels. A[SL] est la droite intersection de 2 plans décalés de 20mm par rapport à ses plans de référence spécifiés(*). B est ensuite le plan médian de 2 plans parallèles, centrés sur cette droite et distants de la cote nominale , qui minimise la somme des carrés des écarts A[SL] 0,05 CZ. A. (*) la référence spécifiée est assez instable, mais la droite est très stable.")
43
SURFACE PRESQUE PLANE Bien que complexe, la surface A ne bloque que les ddl du plan équivalent. Le plan A[PL] est défini dans le modèle nominale La surface nominale de référence est associée à la surface réelle A. Le plan A[PL] est défini par rapport à la surface nominale. Elément de situation Le balançage est fait sans les mobilités du plan Les mobilités du plan restent disponibles - pour la localisation - pour construire le système de références 8x Ø10±0,2 Ø A[PL] M (1) B 0,4 A[PL] B L (2) 0,5 A[PL] A
![SURFACE PRESQUE PLANE Bien que complexe, la surface A ne bloque que les ddl du plan équivalent. Le plan A[PL] est défini dans le modèle nominale.](http://slideplayer.fr/slide/10467028/33/images/43/SURFACE+PRESQUE+PLANE+Bien+que+complexe%2C+la+surface+A+ne+bloque+que+les+ddl+du+plan+%C3%A9quivalent.+Le+plan+A%5BPL%5D+est+d%C3%A9fini+dans+le+mod%C3%A8le+nominale..jpg "La surface nominale de référence est associée à la surface réelle A. Le plan A[PL] est défini par rapport à la surface nominale. Elément de situation. Le balançage est fait sans les mobilités du plan. Les mobilités du plan restent disponibles. - pour la localisation. - pour construire le système de références. 8x Ø10±0,2. Ø0 A[PL] M. (1) B. 0,4 A[PL] B. L. (2) 0,5. A[PL] A.")
44
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

45
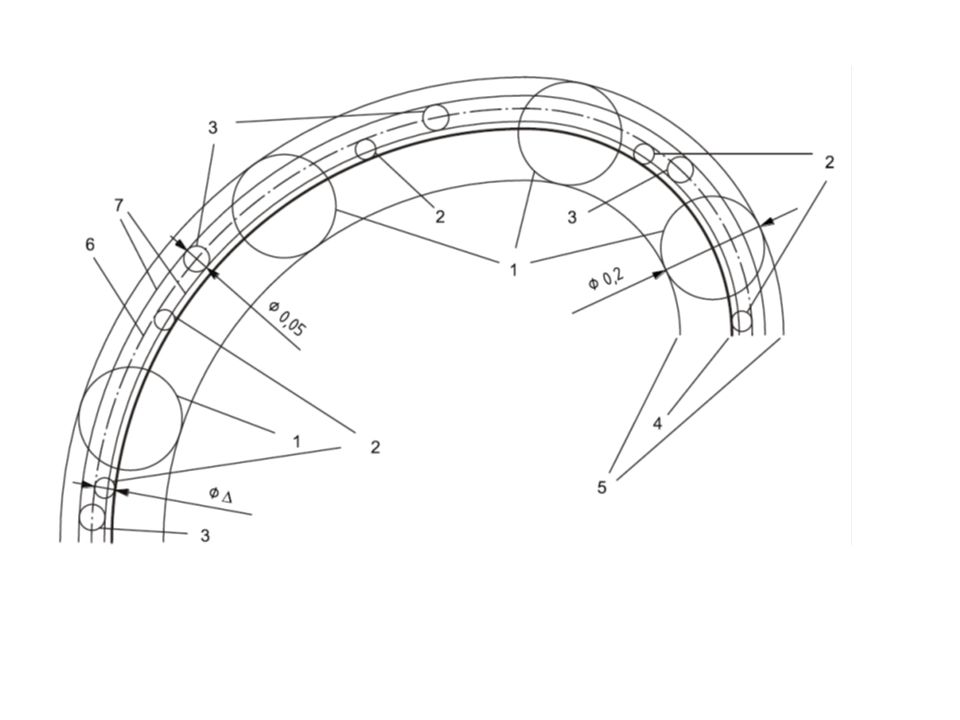
CRITERE D'ASSOCIATION Une zone partielle est une portion de la face d’une pièce. Une référence partielle est une référence définie sur une zone partielle A 1 2 3 (a) (b) Le critère est le même que pour une surface continue de même étendue 1 Elément de référence 2 Référence spécifiée (cylindre de rayon nominal) 3 Zones partielles de contact Cylindre minimax de rayon nominal (tangent extérieur matière) "Bosse" pouvant être extérieure à la référence spécifiée.
 (b) Le critère est le même que pour une surface continue de même étendue. 1 Elément de référence. 2 Référence spécifiée (cylindre de rayon nominal) 3 Zones partielles de contact. Cylindre minimax de rayon nominal. (tangent extérieur matière) Bosse pouvant être extérieure à la référence spécifiée.")
46
IDENTIFICATION DES POINTS
Les points doivent être mesurés au voisinage du point ou de la ligne ou dans la zone. Un écart de ±0,3 n'a quasi aucune influence sur le résultat car la surface nominale est tangente à la surface réelle (après association).
.")
47
LIMITES DE LA ZONE PARTIELLE
Limitation par des lignes Limitation par un contour

48
REPRESENTATION D'UNE ZONE PARTIELLE
Visible 40 Ø12x20 20x40 A1 A1 Cachée 40 20x40 A1 40 Sur le côté 20x40 A1

49
REPRESENTATION D'UNE ZONE PARTIELLE
Une zone partielle mobile est associée à une surface offset de la surface nominale 40x20 40 B1 B1 B1 B1 Point Point caché Ligne Surface

50
CONSTRUCTION DE LA REFERENCE
Indiquer la liste des zones partielles qui constitue une référence partielle B B1, A2 Même nom !

51
SYSTÈME DE REFERENCES PLAN|PLAN|PLAN
B1 ø4 B2 ø4 10 (1) ø14±0,1 E Ø0,2 A B C ø4 40 A1 ø4 C1 25 35 25 8 A 12 50 10 B ø4 A1,2,3 A3 B1,2 ø4 53 C C1 A2 Le système comporte 3 plans
 ø14±0,1. E. Ø0,2 A B C. ø A1. ø4. C A B. ø4. A1,2,3. A3. B1,2. ø C. C1. A2. Le système comporte 3 plans.")
52
REFERENCES PARTIELLES DANS LA RAINURE
40 Æ 0,4 A B C Æ25 12 C1,2 C1 2x12 0,2 A B R6 C 25 A Æ12 B 70 2x12 C2 B1 B1

53
REFERENCES SUR UN 6 POINTS
A1 A1,2,3,4,5,6 A4 A5 A6 Æ 0,2 A A4 A5 A6

54
SPECIFICATION DES ZONES PARTIELLES
(b) (c) 10x25 10x25 10x25 A2 10x25 A2 A1,2 A1 A1 0,05 CZ 0,05 A A1,2 A 0,05 A 0,05 A
 (c) 10x25. 10x25. 10x25. A2. 10x25. A2. A1,2. A1. A1. 0,05 CZ. 0,05. A. A1,2. A. 0,05. A. 0,05. A.")
55
SPECIFICATION DES ZONES PARTIELLES
Parties "rigides" en face des nervures 10x25 10x25 A1 A2 0,05 A A1,2 0,05 A

56
REFERENCES MOBILES Le plan A est primaire
Les 2 point B1 et B2 sont fixes, B3 et B4 sont "mobiles". n1 B1 : point nominal M1 : point Mesuré Après balançage : B1M1.n1=0 B2M2.n2=0 et B3M3.n3 = B4M4.n4 M1 et M2 sont en contact avec le nominal. M3 et M4 ont le même écart par rapport au nominal.

57
GENERALISATION En B1, B2 ei = NiMi.ni Critère des moindres carrés
B1 et B2 sont des appuis linéaires. B3 et B4 sont des appuis linéiques mobiles. B est donc primaire. A est une ponctuelle. A1 2 B B3 B1 B2 A A1 B B1,2,3,4 B4 Recherche du déplacement u,v à l'origine et les rotations a,b g, tels que : En B1, B2 ei = NiMi.ni Critère des moindres carrés En B3, B4 ei = NiMi.ni – d d est le même pour toutes les références mobiles avec la même lettre

58
2 Centres instantanés de rotation
REFERENCES PARTIELLES MOBILES Plan + plan = prismatique 2 Centres instantanés de rotation Liaison pivot (4 ddl) I1 I2 15° Cylindre + plan incliné = hélicoïdale (1ddl) Écart mini sur e5=0 Cylindre + plan médian incliné = hélicoïdale (1ddl) Écart mini sur 6 = Écart mini sur 7 Axe pivot Axe moteur
 I1. I2. 15° Cylindre + plan incliné. = hélicoïdale. (1ddl) Écart mini sur e5=0. Cylindre + plan médian incliné = hélicoïdale. (1ddl) Écart mini sur 6. = Écart mini sur 7. Axe pivot. Axe moteur.")
59
Zone commune implicite
COTATION ISO DE L'AUBE A est formé de 2 plans à 90° des moindres carrés aux faces du bulbe B2 B3 Pale 0,5 A[SL] B Même si A peut rouler sur le bulbe en raison des incertitudes, l'axe A[SL] sera très stable. B1,B2,B3 Zone commune implicite 0,05 A[SL] B Les mobilités résiduelles de A[SL] sont : Une rotation autour de A Une translation suivant A B1 0,05 CZ A A[SL] S 0,05 A B La secondaire B sera associée par les moindres carrés A [SL] : Axe défini sur la CAO par rapport à A. En B1 ei = NiMi.ni En B2, B3 ei = NiMi.ni – d (système classique 3 équations 3 inconnues)
")
60
REFERENCE SUR UNE SECTION
Normalement, pas en primaire…. A1 A1 A 0,05 A1 A A1 A1 Points supplémentaires A1 A A1 A1 A A1 A1 0,05

61
DEFINITION Pas de définition dans la norme !
Les éléments de contact sont des surfaces idéales définies sur le modèle nominal (d'étendue indéterminée). Les éléments de contact peuvent être fixes ou mobiles selon des ddl décrits par rapport au modèle nominal. Le modèle nominal et/ou les éléments de contact sont associés aux éléments de références .
. Les éléments de contact peuvent être fixes ou mobiles selon des ddl décrits par rapport au modèle nominal. Le modèle nominal et/ou les éléments de contact sont associés aux éléments de références .")
62
SIMULATION DU CONTACT La pièce est posée sur un plan. La référence est définie sur le plan. (a) (b) A[CF] Si la pièce est vrillée, calage de la pièce avec des cales de même hauteur…

63
Zone partielle de A (pas élément de contact)
EXEMPLE : CONTACT PLAN SUR SURFACE BOMBEE 60x120 A1 Zone partielle de A (pas élément de contact) 60 80±0,1 2x 0.2 M A [CF] B 0,2 A [CF] (1) (3) 40 A A1 3x A[CF] 0,1 CZ A[CF] (2) B A[CF] est un plan défini dans le modèle nominal, à mettre au contact avec des points prélevés au voisinage des deux lignes de longueur 60mm sur la surface A.
 ±0,1. 2x M. A [CF] B. 0,2. A [CF] (1) (3) 40. A. A1. 3x. A[CF] 0,1 CZ. A[CF] (2) B. A[CF] est un plan défini dans le modèle nominal, à mettre au contact avec des points prélevés au voisinage des deux lignes de longueur 60mm sur la surface A.")
64
ELEMENT DE CONTACT MOBILE
Contact sphérique Contact cylindrique (a) (b) (c) Comment faire l'association ???
 (b) (c) Comment faire l association")
65
REFERENCE SIMULEE F F-F F
B est le nom donné à la surface réelle (les 2 faces de la rainure). La sphère en pointillés représente une bille placée dans la gorge. Pour la localisation (1), l’indication [CF] (contacting feature ou élément de contact) précise que la référence secondaire est construite avec l’élément en pointillés noté B[CF] monté sur une prismatique Le système de références est défini par A et par la sphère en position nominale. L'association est réalisée en translatant la sphère dans la direction de mobilité. F B[CF] B[CF] sØ10 0,2 A A L (2) F-F -0,03 B Æ12 12 F Ø12x70 A A1 80 A1 0,2 A L B [CF] (1)
. La sphère en pointillés représente une bille placée dans la gorge. Pour la localisation (1), l’indication [CF] (contacting feature ou élément de contact) précise que la référence secondaire est construite avec l’élément en pointillés noté B[CF] monté sur une prismatique. Le système de références est défini par A et par la sphère en position nominale. L association est réalisée en translatant la sphère dans la direction de mobilité. F. B[CF] B[CF] sØ10. 0,2. A. A L. (2) F-F. -0,03. B. Æ F. Ø12x70. A. A A1. 0,2. A L B [CF] (1)")
66
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

67
INDICATION DE PLANS D'ANNOTATION
Rappel : initialement, lors du passage 2D -> 3D, le plan d'annotation donnait le plan de la vue contenant la spécification. Désigne le plan de coupe pour définir une ligne sur une surface Plan d'intersection // A Plan d'orientation Désigne l'orientation d'une zone de tolérance // A Désigne la direction de propagation pour réunir les faces de la pièce. Plan de collection A Élément de direction Désigne la direction de la largeur de la zone de tolérance. A

68
4 SYMBOLES Incluant Le plan d'annotation passe par B.
Axe nominal de l'élément spécifié B B B B

69
PLACE DU PLAN D'ANNOTATION
Le plan d'annotation doit être placé à droite de la spécification (afin de laisser la spécification au plus proche de la surface) 0,2 A B // B 0,2 A B // B Le plan d'annotation ne peut pas être placé au dessus du cadre. // B 0,1 A B 0,2 A B Le plan d'orientation n'a pas de sens avec une zone de tolérance cylindrique Ø0,4 D E
 0,2 A B. // B. 0,2 A B. // B. Le plan d annotation ne peut pas être placé au dessus du cadre. // B. 0,1 A B. 0,2 A B. Le plan d orientation n a pas de sens avec une zone de tolérance cylindrique. Ø0,4 D E.")
70
2 plans entre lesquels peut se déplacer l'état virtuel
ZONE DE TOLERANCE SUR UN CYLINDRE Sans symbole Ø, la zone est limitée par 2 plans parallèles distants de la tolérance. En 2D, les plans sont orientés perpendiculairement à la flèche. En 3D, l'orientation des plans est donnée par un plan d'orientation. Position ou orientation 0,05 A Ø20±0,1 0,05 L A // P 0,05 A // P 2 plans entre lesquels peut se déplacer l'état virtuel Plan d'orientation Plan d'orientation P P Jamais dit dans les normes Le plan d'annotation est défini dans le modèle nominal. Pour la position, la zone de tolérance est centrée sur l'axe nominal. Pour l'orientation, la zone de tolérance est parallèle à l'axe nominal. Pour la forme, la zone de tolérance est libre 10 nov 2014

71
EXIGENCE DANS UNE DIRECTION DONNEE
Cotation du corps Zone de tolérance Liaison sans jeu 0,05 0,05 A A A 0,1 A 30 30 30 A A A Liaison avec jeu Etat virtuel au minimum de matière Plans entre lesquels peut se déplacer l'état virtuel. 0,05 L A A Æ20,07 Ø20±0,02 30 30 A A

72
ZONE DE TOLERANCE ENTRE 2 PLANS
Il n'y a pas de Ø devant la tolérance : La zone de tolérance est comprise entre 2 plans distants de 0,1 parallèles au plan B défini dans l'indicateur d'orientation. // B (1) (2) (2) (1) Le modèle nominal comporte, les surfaces A et B et l'axe spécifié. Les zones de tolérance sont définies dans ce nominal. Pour la spécification (1), le modèle nominal est associé à la référence A. La rotation résiduelle autour de A permet d'orienter le modèle nominal dans la direction de l'axe spécifié. La zone de tolérance peut être translatée pour que l'axe réel doit, si possible, dans la zone de tolérance. Idem pour (2) 10 nov 2014
 (2) (2) (1) Le modèle nominal comporte, les surfaces A et B et l axe spécifié. Les zones de tolérance sont définies dans ce nominal. Pour la spécification (1), le modèle nominal est associé à la référence A. La rotation résiduelle autour de A permet d orienter le modèle nominal dans la direction de l axe spécifié. La zone de tolérance peut être translatée pour que l axe réel doit, si possible, dans la zone de tolérance. Idem pour (2) 10 nov")
73
PLAN D'ORIENTATION : SYSTÈME DE REFERENCES INCOMPLET
6x Ø10±0,02 0,2 0,2 0,2 F 0,2 A A // F (a) 0,1 A A F (b) 0,05 A A F (c) 25 20 20 20 20 A (b) (c) 0,05 0,1 25 25 0,1
 0,1. A. A. F. (b) 0,05. A. A. F. (c) A. (b) (c) 0,05. 0, ,1.")
74
PLAN D'ORIENTATION : SYSTÈME DE REFERENCES COMPLET
20 40 2x Ø10±0,02 0,1 ø0, A B A 0,1 A CZ A B // P ø0,2 25 B P P 15 A La zone de tolérance est définie dans le modèle nominal, centré sur les axes nominaux. La zone peut ensuite être translatée pour que les deux axes réels soient, si possible, dans la zone de tolérance

75
ZONE DE TOLERANCE DE FORME SUR UN CYLINDRE
0,05 // P Le modèle nominal est défini sur la surface P si P est une surface réelle ou sur d'autres surfaces de la pièce. La zone de tolérance est parallèle à P. La zone de tolérance peut ensuite être déplacée pour placer l'axe réel dans la zone de tolérance. Tous les degrés de liberté sauf la rotation autour de l'axe peuvent être utilisés. P Sur le plan incertitude de mesure, tout écart de quelques degrés sur l'orientation des plans autour de l'axe n'a aucun effet sur la conformité ou non de la pièce. Recommandation : Pour orienter une zone de tolérance sans référence, prendre un plan d'orientation sur une surface réelle. 10 nov 2014

76
RECTITUDE DES LIGNES DU PLAN
Le plan P est défini dans le modèle nominal. Elément spécifié : Elément spécifié : ligne intersection de la surface réelle supérieure avec les plans d’intersection parallèles à P. Zone de tolérance : zone comprise entre 2 droites distantes de 0,02 appartenant au plan d’intersection. La spécification est vérifiée si l’élément spécifié est contenu dans la zone de tolérance, pour tous les plans d’intersection. Garantir le contact selon une ligne mobile. 0,02 // P Plan d'intersection t P

77
PLANS D'INTERSECTION SUR UN PLAN
(b) 0,1 1 seule zone malgré le fractionnement
 0,1. 1 seule zone malgré le fractionnement.")
78
RECTITUDE DES GENERATRICE D'UN CYLINDRE
Elément spécifié : ligne intersection de la surface réelle du cylindre avec les plans d’intersection passant par l’axe du cylindre. Zone de tolérance : zone comprise entre 2 droites distantes de 0,02 appartenant au plan d’intersection. La spécification est vérifiée si l’élément spécifié est contenu dans la zone de tolérance, pour tous les plans d’intersection. Garantir le contact selon une génératrice 0,02 t Ex : roulement à rouleaux

79
PLAN D'INTERSECTION SUR SURFACE DE REVOLUTION
Plan passant par l'axe de A

80
SECTION D'UNE SURFACE COMPLEXE
La surface est coupée par des plans d'intersections parallèles à un plan ou perpendiculaires à une droite. Dans chaque plan, la ligne intersection doit appartenir à la zone de tolérance définie par la courbe offset de la courbe nominale. Surface nominale Zone de tolérance (entre deux surfaces offset de la surface nominale) 0,8 // S section Remarque : le symbole O "tout autour" génère implicitement une seule surface S. S
 0,8. // S. section. Remarque : le symbole O tout autour génère implicitement une seule surface S. S.")
81
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

82
ZONE COMMUNE La zone commune s'applique a priori sur des éléments coaxiaux ou coplanaires pouvant être inclus dans une seule zone de tolérance. Exemple : La surface est interrompue par une gorge. Une seule zone commune à toutes les surfaces. B représente l'ensemble des surfaces. 0,05 CZ A B 0,05 A A

83
RECTITUDE EN ZONE COMMUNE
Les axes doivent appartenir à la même zone 0,05 Æ0,05 CZ B Les cylindres doivent appartenir au même état virtuel défini par deux cylindres coaxiaux. Æ0,05 CZ B B désigne les 2 surfaces

84
SPECIFICATIONS DE SURFACES EN ZONE COMMUNE
Les 3 plans constituent une seule surface, avec une seule zone commune. UF 0,2 CZ A B 0, A B 0,1>< CZ A B 0,1>< A B 0,05 CZ 0,05 30 90° C C 20 C est l'ensemble des 3 plans 15 B A Position Orientation Forme 0,1 0,05 0,2 La zone est centrée sur le nominal La zone est construite centrée sur le nominal puis translatée dans toutes les directions La zone est construite centrée sur le nominal puis déplacée librement 3x = 0, A B

85
SPECIFICATIONS DE SURFACES EN ZONE COMMUNE
UF 0,5 CZ A B 0, A B 0,2 >< CZ A B 0,2 >< A B 0,1 CZ 0,1 C C B C est l'ensemble des 3 surfaces A

86
ENTRE P↔Q ; R↔S CZ P↔Q Q R C P P S Q C A Les trous et rainures sensiblement perpendiculaires à la surface sont exclus. Si doute => commentaires

87
ZONE EXPLICITE La juxtaposition de zones restreintes est très difficile à faire sur surfaces complexe. Il est indispensable d'admettre qu'une zone restreinte puisse regrouper plusieurs surfaces. C CZ C La zone restreinte est aussi considérée comme zone commune implicite (si la zone restreinte est fractionnée, il faut créer la collection)
")
88
"EPAISSEUR" D'UNE PIECE COMPLEXE
La spécification en orientation libère la position par rapport à A, pour ne garder que l'épaisseur. (b) (a) P Q,R S 0,06 CZ >< A B 0,06 CZ A P Q S R A A
 (a) P Q,R S. 0,06 CZ >< A. B. 0,06 CZ. A. P. Q. S. R. A. A.")
89
TOUT AUTOUR Association de l'ensemble des surfaces du contour en une seule surface. // B 0,2 A 0,1 // B P P↔Q Q 0,05 B Par défaut, le contour est continu. Les trous et rainures sensiblement perpendiculaires à la surface sont exclus. Si doute => commentaires En projet 0, A B C

90
ENVELOPPE COMMUNE A PLUSIEURS CYLINDRES
2x Æ29,90, CT 2x Æ29,90,02 A Les deux enveloppes sont indépendantes (comme pour les enveloppes du groupe de trous. Avec CT, les deux cylindres sont considérés comme une seule surface. L'enveloppe est commune aux deux cylindres. (norme )
")
91
INSTABILITE DES NORMES
Jusqu'à présent, les surfaces associées par ces symboles étaient implicitement considérées comme une seule surface 2c P↔Q P↔Q ; R↔S A A A A La norme étudie la possibilité de considérer par défaut chaque surface comme indépendante. Cela impose de mettre des CZ partout. Cette décomposition en éléments indépendants est sujette à beaucoup de litiges. CZ A 0,2 // A 0,1 A Une seule zone ! A

92
REPETITION Pas de CZ ni nx au dessus
La spécification est considérée comme répétée Pour chaque surface C Actuellement, il n'y a aucun moyen pour répéter une spécification avec CZ . => Mettre un commentaire 4 fois sur les 4 faces de la pièce 0,05CZ

93
REPETITION D'INDICATIONS LOCALES EQUIVALENTES
3x Par définition, les spécifications de forme sont libres par rapport au nominal 0,05 Répétition d'indications locales 4x R 3±0,4 4x Ø 10±0,2 4x ch 3 à 45° 4x Rz 1,7

94
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

95
ZONE DE TOLERANCE VARIABLE
ISO 1101 La tolérance est 0,1 sur la ligne J et 0,2 sur la ligne K. La tolérance varie linéairement entre ces deux lignes J↔K K J marge 0,1-0,2 A 0,2 0,1 J K 30 30 A Pour une surface, la variation est linéaire en fonction de l'abscisse curviligne.

96
ZONE DE TOLERANCE VARIABLE
Contour ouvert Contour fermé P,Q,R↔S P,Q,R,S↔P 0,1-0,2-0,1-0,3 0,1-0,2-0,1-0,3-0,1 P Q R S

97
ZONE DE TOLERANCE ASYMETRIQUE
0,6 UZ [-0,2] A B Sens extérieur matière Surface nominale (CAO) Profil théorique défini par un offset de 0,2 dans la matière 0,2 0,6 Zone de tolérance de largeur 0,6 centrée sur le profil théorique 0,05 UZ [-0,2] Le UZ doit être répété dans toutes les spécifications relatives à la surface. 0,3 UZ [-0,2] >< A B 0,6 UZ [-0,2] A B Attention, si la surface est utilisée comme référence, il faut également mettre le UZ dans le système de références. Æ 0,2 C UZ[-0,2] L'emploi d'un UZ est à éviter. Il est préférable de remettre à jour le modèle nominal à l'aide de la notion d'offset.
 Profil théorique défini par un offset de 0,2 dans la matière. 0,2. 0,6. Zone de tolérance de largeur 0,6 centrée sur le profil théorique. 0,05 UZ [-0,2] Le UZ doit être répété dans toutes les spécifications relatives à la surface. 0,3 UZ [-0,2] >< A B. 0,6 UZ [-0,2] A B. Attention, si la surface est utilisée comme référence, il faut également mettre le UZ dans le système de références. Æ 0,2. C UZ[-0,2] L emploi d un UZ est à éviter. Il est préférable de remettre à jour le modèle nominal à l aide de la notion d offset.")
98
ZONE DE TOLERANCE ASYMETRIQUE LIBRE AVEC OZ

100
PLAN Les critères d’association Le filtrage
Modificateurs de distance entre références Les éléments de situation Les références partielles, les éléments de contact fixes et mobiles Les plans d'annotation Composition et répétition Les zones de tolérances particulières Pièces déformables

101
PLAN Principe Spécification à l'état libre et à l'état contraint Redressage numérique Suppression de la gravité

102
PROBLEMATIQUE Une pièce peu rigide peut être relativement déformée, mais elle sera remise en forme lors de son assemblage dans le mécanisme. La norme ISO NR propose donc de définir les conditions de mesure de la pièce pour la mettre dans une forme la plus proche possible de sa forme en fonctionnement, afin de vérifier les spécifications fonctionnelles de la pièce. En parallèle, le dessin peut comporter des spécifications à l'état libre avec le modificateur qui seront donc vérifiées avec une simple fixation de la pièce sur le moyen de mesure (par de la pâte à modeler par exemple). La description de l'état contraint est un simple texte ou un dessin, qui décrit généralement le bridage de la pièce sur un montage. On peut aussi avoir des conditions de pression, voire de température. F
. La description de l état contraint est un simple texte ou un dessin, qui décrit généralement le bridage de la pièce sur un montage. On peut aussi avoir des conditions de pression, voire de température. F.")
103
SPECIFICATION D'UNE PIECE NON RIGIDE
Mettre l'indication ISO NR dans le cartouche et spécifier les conditions de mesure à l'état contraint. 0,04 0,1 A 0,2 F 0,5 F A 1000.05 E 1000.2 F A Condition de contraintes : ISO NR La pièce est plaquée face A sur un marbre avec 8 vis M6 placées dans les 8 trous périphériques. Le couple de serrage des vis est de 10 Nm.

104
PIECE NON RIGIDE S S S S S S S
Une pièce souple peut être plaquée sur de multiple points de contact pour la remettre en forme lors de la fabrication et du contrôle. S S S S S S B1,2,3, 4 B Condition de contrainte : norme ISO NR La pièce doit être plaquée sur les 10 points A1 à A10 et les 4 points B1 à B4 sur deux plans perpendiculaires. ø4 B3 ø4 B1 A ø4 ø4 A1 à 10 ø4 ø4 ø4 A1 A3 A5 A7 A9 Comme il est impossible de palper les points de la pièce dans le montage, le système de références AB est construit sur les surfaces du montage de contrôle. Sans l'indication de contrainte, la référence A serait le plan minimax extérieur matière aux 10 points palpés sur la surface réelle, la référence B serait le plan perpendiculaire à A, minimax extérieur matière aux 4 points.

105
TUBULURE SUR SPHERES AVEC ERGOT
Ecrou C 4 F A B C 1 A B C Clip pour recevoir C 100 Repère mesure A 100 B Condition de contrainte : norme ISO NR La pièce est bridée dans 2 cônes d'angle 90° tels que l'entraxe de 2 sphères Ø10 soit 100 mm. Elle est orientée sur C par un clips en position nominale.

106
TUBULURE SUR CONES AVEC POINT D'APPUI
Ø0,1 A A[CF] B[CF] C (4) 0,05 (2) C1 1,5±0,2 A A[CF] 1 A[CF] –B[CF] C Ø6 (1) C 100 C1 Ø0,1 A A[CF] B[CF] C (4) 0,05 (2) Condition de contrainte : norme ISO NR Les cônes A et B sont bridées sur deux sphères Ø6 distantes de 100mm. Le tube est en appui ponctuel sur C1 B B[CF] Ø6 sØ1 A A [CF] (3)
 0,05 (2) C1. 1,5±0,2. A. A[CF] 1 A[CF] –B[CF] C. Ø6. (1) C C1. Ø0,1 A A[CF] B[CF] C. (4) 0,05 (2) Condition de contrainte : norme ISO NR. Les cônes A et B sont bridées sur deux sphères Ø6 distantes de 100mm. Le tube est en appui ponctuel sur C1. B. B[CF] Ø6. sØ1 A A [CF] (3)")
107
CONDITION DE CONTRAINTES SUR ZONES PARTIELLES
La pièce peut-être mise en position sur un montage 1x0,5 Ø4 (2) 0,5 A A9 A2 Ø4 A1 1x0,5 Ø4 A7 Ø4 A3 A4 Ø4 G B1 Ø4 (1) 0,8 A B2 B1,2,3 Ø4 (3) 0,3 A 1x0,5 B3 A8 Ø4 A5 Ø4 A A1,2…9 A6 ISO NR : Conditions de mesure : zones A1 à A9 en position nominale. Le vecteur G doit être orienté selon la gravité. Le système de références A doit être mesuré sur le montage, avant de placer la pièce.
 0,5 A. A9. A2. Ø4. A1. 1x0,5. Ø4. A7. Ø4. A3. A4. Ø4. G. B1. Ø4. (1) 0,8 A. B2. B1,2,3. Ø4. (3) 0,3 A. 1x0,5. B3. A8. Ø4. A5. Ø4. A. A1,2…9. A6. ISO NR : Conditions de mesure : zones A1 à A9 en position nominale. Le vecteur G doit être orienté selon la gravité. Le système de références A doit être mesuré sur le montage, avant de placer la pièce.")
108
AUTRES MODIFICATEURS SPECIALISE

109
ISO 8015 :1991, Technical drawings –Fundamental tolerancingprincipal.
SO 286-1:1988 [1], ISO system of limits and fits —Part 1: Bases of tolerances, deviations and fits SO 14405: [1], Dimensional tolerancing—Linear sizes. ISO :1999, Geometrical features —Part 1: General terms and definitions.ISO :1999, Geometrical features —Part 2: Extracted median line of a cylinder and a cone, extracted median surface, local size of an extracted feature. ISO 1101:2005, Tolerancingof form, orientation, location and run-out.ISO 1101:2004/DAM 1[2], Tolerancingof form, orientation, location and run-out —Amendment 1:Representation of specifications in the form of a 3D model. ISO :1989, General tolerances –Part1 –Tolerances for linear and angular dimensions without individualtolerance indications. ISO :1989, General tolerances –Part2 –Geometrical tolerances for features without individual tolerance indications.ISO 3040:1990, Technical drawings –Dimensioning and tolerancing-cones. ISO 1660:1987, Geometrical tolerancing—Dimensioning and tolerancingof profiles.ISO 5458:1998, Geometrical tolerancing—Positional tolerancing. ISO 2692:1988 [2], Maximum material requirement (MMR) and least material requirement (LMR) ISO 5459:1981 —[2], Datumsand datum-systems for geometrical tolerances. ISO 10578:1992, Tolerancingof orientation and location –Projected tolerance zone. ISO 10579:1993, Dimensioning and tolerancing Non-rigid parts
 and least material requirement (LMR) ISO 5459:1981 —[2], Datumsand datum-systems for geometrical tolerances. ISO 10578:1992, Tolerancingof orientation and location –Projected tolerance zone. ISO 10579:1993, Dimensioning and tolerancing Non-rigid parts.")
111
GROUPE OU REPETITION AVEC "TOUT AUTOUR"
Impose impérativement une zone commune On ne peut pas imposer que le "Tout autour" donne implicitement un groupe ou une répétition sans donner le nombre d'éléments du groupe ou le nombre de motifs considérés. Il serait très difficile d'établir de manière contractuelle, la séparation du contour en zones indépendantes. On pourrait se baser sur la continuité en tangence du contour, ou la continuité en courbure, mais il serait curieux que la définition ne soit pas la même avec ou sans congé de raccordement, ou soit perturbée par la façon dont est modélisée certaines surfaces. Quid autour d'un trou ? Cylindre ou plan en 2 parties

112
SURFACE AVEC ARETES VIVES
Surface offset Les surfaces (ou lignes) offset extérieures à l'angle sont prolongées selon le vecteur tangent t pour définir une courbe intersection. Surface nominale Surface offset n : normale à la surface sur la courbe limite. u : vecteur tangent à la courbe limite. t= u ^ n : vecteur tangent n u t Surface nominale Application à un cube Courbe limite de la surface offset (obtenue lorsque la sphère parcours la courbe intersection) Courbe intersection des surfaces nominales Etat vituel au maxi matière
 offset extérieures à l angle sont prolongées selon le vecteur tangent t pour définir une courbe intersection. Surface nominale. Surface offset. n : normale à la surface sur la courbe limite. u : vecteur tangent à la courbe limite. t= u ^ n : vecteur tangent. n. u. t. Surface nominale. Application à un cube. Courbe limite de la surface offset (obtenue lorsque la sphère parcours la courbe intersection) Courbe intersection des surfaces nominales. Etat vituel au maxi matière.")
113
TUBULURE COUDEE AVEC ERGOT
Ecrou Pour certaines pièces, il est très difficile d'exprimer le système de références à l'état libre, car la déformation peut être très importante. C'est notamment le cas des tubes métalliques coudés souvent mis en position par un contact sphère/cône à chaque extrémité. C En fonctionnement, la pièce sera donc placée dans 2 cônes, ce qui va imposer la distance entre les sphères. L'orientation du tuyau autour de l'axe défini par les centres de sphères est donné par un ergot logé dans un clip (sans jeu) 4 F A B C 1 A B C Dans l'état contraint, le montage de contrôle impose une distance de 100 mm entre les centres de sphères, par exemple en bloquant les 2 sphères dans 2 cônes. A l'état libre, la distance entre les 2 sphères peut être sensiblement différente. A 100 B Clip pour recevoir C 100 Repère mesure Condition de contrainte : norme ISO NR La pièce est bridée dans 2 cônes d'angle 90° tels que l'entraxe de 2 sphères Ø10 soit 100 mm. Elle est orientée sur C par un clips en position nominale.
 4 F A B C. 1 A B C. Dans l état contraint, le montage de contrôle impose une distance de 100 mm entre les centres de sphères, par exemple en bloquant les 2 sphères dans 2 cônes. A l état libre, la distance entre les 2 sphères peut être sensiblement différente. A B. Clip pour recevoir C Repère mesure. Condition de contrainte : norme ISO NR. La pièce est bridée dans 2 cônes d angle 90° tels que l entraxe de 2 sphères Ø10 soit 100 mm. Elle est orientée sur C par un clips en position nominale.")
114
TUBULURE COUDEE AVEC ERGOT
4 F A B C A est la sphère de rayon nominal des moindres carrés associé à la zone partielle. B est la sphère de rayon nominal des moindres carrés associé à la zone partielle, sans contrainte de distance par rapport à A. C est la surface nominale des moindres carrés en position parfaite par rapport à l'axe défini par A et B. 1 A B C 2 F A A B 100 Le modèle CAO est donc centré sur A, aligné sur AB et orienté par l'axe AB et C. Cette définition est la même à l'état libre et à l'état contraint, la tolérance est plus large à l'état libre. A l'état contraint, il ne sera plus possible de palper les sphères. Il faut donc créer un repère mesure sur le montage de contrôle et identifier la position de l'axe des sphères dans ce repère mesure. A l'état contraint, il est possible d'enlever le symbole , mais cela ne change rien. Par contre, sans ce symbole, à l'état libre, la contrainte de distance donnerait une mauvaise image de la sphère B. La spécification est quasi identique, sans contrainte de distance entre A et B, mais avec une origine placée au milieu des 2 sphères. 2 (A-B) [DV] C Il ne serait pas possible de constituer un groupe avec les 2 sphères, car les contacts ne sont pas symétriques. La référence sur le groupe ne représenterait pas bien les sphères.
 [DV] C. Il ne serait pas possible de constituer un groupe avec les 2 sphères, car les contacts ne sont pas symétriques. La référence sur le groupe ne représenterait pas bien les sphères.")
115
TUBULURE COUDEE AVEC APPUI PLAN
Dans cette version, le tube se termine par un cône. L'orientation est donnée par le serrage du le plan à l'arrière du cône. Le contrôle est effectué à l'état libre et à l'état contraint dans un montage. (1) 0,2 (4) (2) Ø0,3 A F A[PT] B 4 F A[PT] B C [OP] (3) 2 F A[PT] B 1 A[PT] B C[OP] Le contrôle est effectué à l'état libre et à l'état contraint dans un montage. Les spécifications (1) garantissent la forme des 2 cônes. (2) spécifie l'orientation du cône par rapport à AB. (3) impose la position à l'état libre pour être sûr qu'il n'y aura pas trop de déformation lors de l'assemblage. (4) garantissent la forme générale de toute la pièce par rapport aux appuis. Ø6 A1[PT] B (1) 0,2 C Ø6 A C1 C1[OP] A1 Condition de contrainte : norme ISO NR La pièce est bridée dans 2 portées toriques avec un plan de jauge Ø6 sur une pente de 15° en position nominale. Elle est orientée sur B par un appui plan mobile dans la direction nominale
 0,2. (4) (2) Ø0,3 A F A[PT] B. 4 F A[PT] B C [OP] (3) 2 F A[PT] B. 1 A[PT] B C[OP] Le contrôle est effectué à l état libre et à l état contraint dans un montage. Les spécifications (1) garantissent la forme des 2 cônes. (2) spécifie l orientation du cône par rapport à AB. (3) impose la position à l état libre pour être sûr qu il n y aura pas trop de déformation lors de l assemblage. (4) garantissent la forme générale de toute la pièce par rapport aux appuis. Ø6. A1[PT] B. (1) 0,2. C. Ø6. A. C1. C1[OP] A1. Condition de contrainte : norme ISO NR. La pièce est bridée dans 2 portées toriques avec un plan de jauge Ø6 sur une pente de 15° en position nominale. Elle est orientée sur B par un appui plan mobile dans la direction nominale.")
116
TUBULURE COUDEE AVEC APPUI PLAN
0,2 Ø0,3 A F A[PT] B 4 F A[PT] B C [OP] 2 F A[PT] B A[PT] est un point situé sur l'axe du cône des moindres carrés, sur un plan de jauge Ø6. (3 coordonnées). B est un plan minimax à la collerette, sans contrainte de distance par rapport à A. C[OP] est un point situé sur l'axe du cône des moindres carrés, sur un plan de jauge Ø6 sans contrainte de distance par rapport à A. 1 A[PT] B C[OP] Ø6 A1[PT] B (1) 0,2 C Ø6 A C1 C1[OP] A1 Axe nominal A[PT]B Axe nominal de C Le modèle CAO est centré sur l'axe le point A[PT]. Il est orienté selon la normale au plan B. L'orientation autour de l'axe A[PT] B est donnée en annulant la distance entre le point C[OP] et l'axe nominal du cône C dans la direction du point orienté C[OP] donnée par le trait rouge. C(OP]
. B est un plan minimax à la collerette, sans contrainte de distance par rapport à A. C[OP] est un point situé sur l axe du cône des moindres carrés, sur un plan de jauge Ø6 sans contrainte de distance par rapport à A. 1 A[PT] B C[OP] Ø6. A1[PT] B. (1) 0,2. C. Ø6. A. C1. C1[OP] A1. Axe nominal A[PT]B. Axe nominal de C. Le modèle CAO est centré sur l axe le point A[PT]. Il est orienté selon la normale au plan B. L orientation autour de l axe A[PT] B est donnée en annulant la distance entre le point C[OP] et l axe nominal du cône C dans la direction du point orienté C[OP] donnée par le trait rouge. C(OP]")
117
TUBULURE COUDEE AVEC ERGOT
Dans cette version, l'orientation est donnée par un ergot qui bloque la rotation autour des 2 cônes. C (2) 4 F (A[PT]-B(PT]) [DV] C 1 (A[PT]-B(PT]) [DV] C (1) Les spécifications (1) garantissent la forme des 2 cônes. (2) garantissent la forme générale de toute la pièce par rapport aux appuis. Il est éventuellement possible d'ajouter une spécification à l'état libre pour chacun des 2 cônes pour imposer une orientation des cônes plus précise que le tolérancement général. Ø6 0,2 A1[PT] B Ø6 0,2 A B1 A1 B1[PT] (1) Condition de contrainte : norme ISO NR La pièce est bridée dans 2 portées toriques avec un plan de jauge Ø6 sur une pente de 15° Elle est orientée sur C par un clips en position nominale. 0,4 F (A[PT]-B(PT]) [DV] C
 4 F (A[PT]-B(PT]) [DV] C. 1 (A[PT]-B(PT]) [DV] C. (1) Les spécifications (1) garantissent la forme des 2 cônes. (2) garantissent la forme générale de toute la pièce par rapport aux appuis. Il est éventuellement possible d ajouter une spécification à l état libre pour chacun des 2 cônes pour imposer une orientation des cônes plus précise que le tolérancement général. Ø6. 0,2. A1[PT] B. Ø6. 0,2. A. B1. A1. B1[PT] (1) Condition de contrainte : norme ISO NR. La pièce est bridée dans 2 portées toriques avec un plan de jauge Ø6 sur une pente de 15° Elle est orientée sur C par un clips en position nominale. 0,4 F (A[PT]-B(PT]) [DV] C.")
118
TUBULURE COUDEE AVEC ERGOT
A[PT] est un point situé sur l'axe du cône des moindres carrés, sur un plan de jauge Ø6. B[PT] est un point situé sur l'axe du cône des moindres carrés, sur un plan de jauge Ø6. (l'indication [DV] libère la contrainte de distance entre les 2 points). (A[PT]-B(PT]) [DV] est l'axe passant par ces 2 points. C est la surface nominale des moindres carrés en position parfaite par rapport à l'axe défini par A - B. C (2) 4 F (A[PT]-B(PT]) [DV] C 1 (A[PT]-B(PT]) [DV] C (1) Ø6 0,2 A1[PT] B Ø6 0,2 A B1 A1 B1[PT] (1) Le modèle CAO est donc centré sur le milieu de A[PT] et B[PT], aligné sur A-B et orienté par l'axe A-B et C.
. (A[PT]-B(PT]) [DV] est l axe passant par ces 2 points. C est la surface nominale des moindres carrés en position parfaite par rapport à l axe défini par A - B. C. (2) 4 F (A[PT]-B(PT]) [DV] C. 1 (A[PT]-B(PT]) [DV] C. (1) Ø6. 0,2. A1[PT] B. Ø6. 0,2. A. B1. A1. B1[PT] (1) Le modèle CAO est donc centré sur le milieu de A[PT] et B[PT], aligné sur A-B et orienté par l axe A-B et C.")
119
C SYNTHESE 1 A B C La pièce est supposée plus rigide du côté A. Le montage sera réalisé en déformant le côté B. L'origine du modèle CAO est sur A. A B C 1 (A-B) [DV] C La déformation est symétrique. L'origine est fixée au milieu. A B Les chaînes de cotes sont réalisées à l'état contraint, donc à entraxe parfait. Il n'y a pas de différence majeure entre les 2 modèles. Seule la variation d'entraxe sur les pièces appuis ont une influence sur la position des nominaux (ce n'est pas l'écart à l'état libre).
 [DV] C. La déformation est symétrique. L origine est fixée au milieu. A. B. Les chaînes de cotes sont réalisées à l état contraint, donc à entraxe parfait. Il n y a pas de différence majeure entre les 2 modèles. Seule la variation d entraxe sur les pièces appuis ont une influence sur la position des nominaux (ce n est pas l écart à l état libre).")
120
PLAN Principe Spécification à l'état libre et à l'état contraint Redressage numérique Suppression de la gravité

121
PROBLEMATIQUE Une pièce peut être déformée sous son propre poids. Pour assurer la répétabilité des mesures, les conditions de contraintes pour la mesure doivent préciser les appuis, le bridage et l'orientation de la pièce. Pour que la mesure soit fonctionnelle, on cherche le plus souvent à placer la pièce dans sa configuration de fonctionnement. Une solution simple consiste à faire la mesure verticalement, pour minimiser les flèches. Le positionnement sur de multiple points d'appui est possible, mais il n'est plus possible de mesurer des spécifications de type forme sur de grandes longueurs.

122
ESTIMATION PAR REDRESSAGE NUMERIQUE
Le principe consiste à modéliser la pièce dans sonl montage de contrôle, avec les appuis et le bridage et calculer la déformation due au efforts appliqués et au poids par éléments finis (un seul calcul). Pour chaque pièce, chaque point de mesure est alors corrigé de la déviation estimée par ce calcul pour obtenir une géométrie en apesanteur.
. Pour chaque pièce, chaque point de mesure est alors corrigé de la déviation estimée par ce calcul pour obtenir une géométrie en apesanteur.")
123
ESTIMATION PAR RETOURNEMENT
Sur une pièce indéformable, l'écart de rectitude peut être mesuré par retournement r = (v2-v1)/2 v2 v1 r r Déformation due au poids On peut supposer que la déformation due au poids est identique dans les 2 positions. La rectitude peut donc bien être estimée par ce moyen. -
/2. v2. v1. r. r. Déformation due au poids. On peut supposer que la déformation due au poids est identique dans les 2 positions. La rectitude peut donc bien être estimée par ce moyen. -")
124
ESTIMATION PAR RETOURNEMENT
Il est aussi possible de fixer une pièce sur un support qui sera retourné dessus-dessous. x y z z y x Chaque point de la pièce est mesuré dans le repère xyz dans les deux positions. La neutralisation de la gravité est obtenue en calculant le point moyen. (Les déformations dues aux efforts de bridages ne sont pas compensées).
.")












 RÉVISION : MOMENTS ET COUPLES>")








