Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Évaluation des interactions Guy Gauthier ing.Ph.D. SYS-823 - Été 2011

2
Exemple Soit le système suivant :

3
Exemple (suite) La valeur de lambda 11 sera : Donc la matrice de Bristol sera :
 La valeur de lambda 11 sera : Donc la matrice de Bristol sera :")
4
Cas #1 : k = 0 La matrice de Bristol devient : u 1 devrait contrôler y 1

5
Cas #1 : k = 0 La réponse si les systèmes sont contrôlés par des PI : λ=1 : cas idéal à rechercher

6
Cas #2 : k = -1 La matrice de Bristol devient : u 1 devrait contrôler y 1 50

7
Cas #2 : k = -1 La réponse si les systèmes sont contrôlés par des PI : 0.75 λ<1 : cas moins idéal, mais acceptable

8
Cas #3 : k = -8 La matrice de Bristol devient : u 1 peut contrôler y 1 ou y 2

9
Cas #3 : k = -8 La réponse si les systèmes sont contrôlés par des PI : 0λ<0.75 : cas à éviter

10
Cas #4 : k = 4 La matrice de Bristol devient : u 1 devrait contrôler y 1

11
Cas #4 : k = 4 La réponse si les systèmes sont contrôlés par des PI : λ>1, mais pas trop loin de 1, pas idéal, mais acceptable

12
Cas #5 : k = 7 La matrice de Bristol devient : u 1 devrait contrôler y 1

13
Cas #5 : k = 7 La réponse si les systèmes sont contrôlés par des PI : λ>>1 : cas à éviter

14
Cas #6 : k = 16 La matrice de Bristol devient : u 1 devrait contrôler y 2, mais persistons à vouloir contrôler y 1

15
Cas #6 : k = 16 La réponse si les systèmes sont contrôlés par des PI : λ<0 : cas à éviter

16
Interprétation de la valeur des éléments Si λ ij = 1, cela indique que le gain en boucle ouverte entre y i et m j est identique au gain en boucle fermée. Combinaison idéale, car les autres boucles nont aucun effets suite à un changement de m j. Recommandation : contrôler y i avec m j.

17
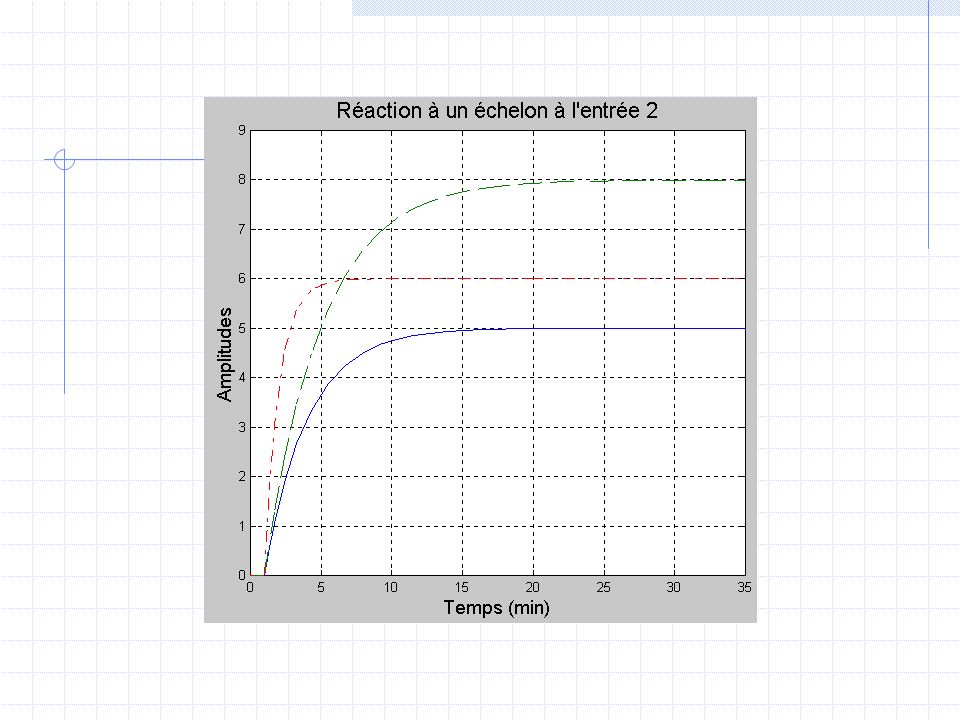
Interprétation de la valeur des éléments [2] λ ij = 0 indique que le gain en boucle ouverte entre y i et m j est égal à 0. m j na aucun effet sur y i. Recommandation : ne pas contrôler y i avec m j.
![Interprétation de la valeur des éléments [2] λ ij = 0 indique que le gain en boucle ouverte entre y i et m j est égal à 0.](http://images.slideplayer.fr/3/1147580/slides/slide_17.jpg "m j na aucun effet sur y i. Recommandation : ne pas contrôler y i avec m j..")
18
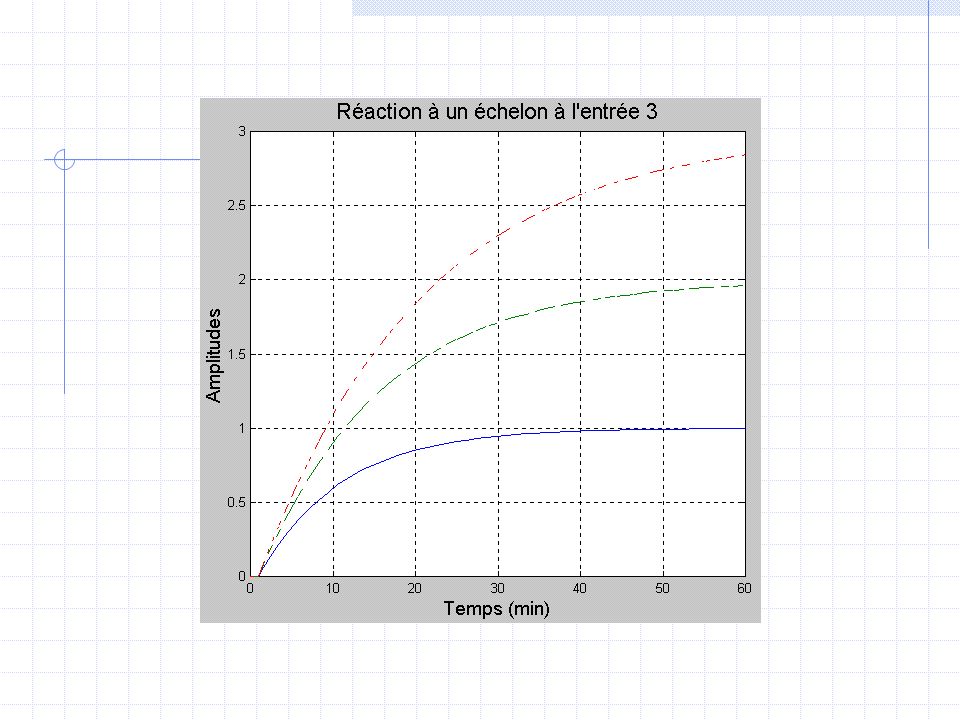
Interprétation de la valeur des éléments [3] 0< λ ij <1 indique que le gain en boucle ouverte entre y i et m j est inférieur au gain en boucle fermée. Une interaction existe. Recommandation : ne pas contrôler y i avec m j si λ ij 0.5
![Interprétation de la valeur des éléments [3] 0< λ ij <1 indique que le gain en boucle ouverte entre y i et m j est inférieur au gain en boucle fermée.](http://images.slideplayer.fr/3/1147580/slides/slide_18.jpg "Une interaction existe. Recommandation : ne pas contrôler y i avec m j si λ ij 0.5.")
19
Interprétation de la valeur des éléments [4] λ ij >1 indique que le gain en boucle ouverte entre y i et m j est supérieur au gain en boucle fermée. Une interaction existe, les autres boucles sopposent à leffet voulu. Peut entraîner une instabilité si λ ij est très élevé. Recommandation : ne pas contrôler y i avec m j si λ ij est très élevé.
![Interprétation de la valeur des éléments [4] λ ij >1 indique que le gain en boucle ouverte entre y i et m j est supérieur au gain en boucle fermée.](http://images.slideplayer.fr/3/1147580/slides/slide_19.jpg "Une interaction existe, les autres boucles sopposent à leffet voulu. Peut entraîner une instabilité si λ ij est très élevé. Recommandation : ne pas contrôler y i avec m j si λ ij est très élevé..")
20
Interprétation de la valeur des éléments [5] λ ij <0 indique que le gain en boucle ouverte entre y i et m j à un signe opposé au gain en boucle fermée. Une interaction existe, les autres boucles sopposent à leffet voulu et dominent. Situation dangereuse si une boucle est ouverte (instabilité de la boucle i). Recommandation : ne jamais tenter de contrôler y i avec m j si λ ij est négatif.
![Interprétation de la valeur des éléments [5] λ ij <0 indique que le gain en boucle ouverte entre y i et m j à un signe opposé au gain en boucle fermée.](http://images.slideplayer.fr/3/1147580/slides/slide_20.jpg "Une interaction existe, les autres boucles sopposent à leffet voulu et dominent. Situation dangereuse si une boucle est ouverte (instabilité de la boucle i). Recommandation : ne jamais tenter de contrôler y i avec m j si λ ij est négatif..")
21
Recommandation La paire de variable à combiner ensemble devrait avoir un gain relatif lambda aussi près de 1 que possible.

22
Exemple Soit le système suivant:

26
Matrice de Bristol Matrice de gain en régime permanent:

27
Matrice de Bristol Calcul de la transposée de linverse de K:

28
Matrice de Bristol Produit terme par terme: Situation très mauvaise.

29
Bilan Faute de mieux: m1 et y1; m2 et y2; m3 et y3.

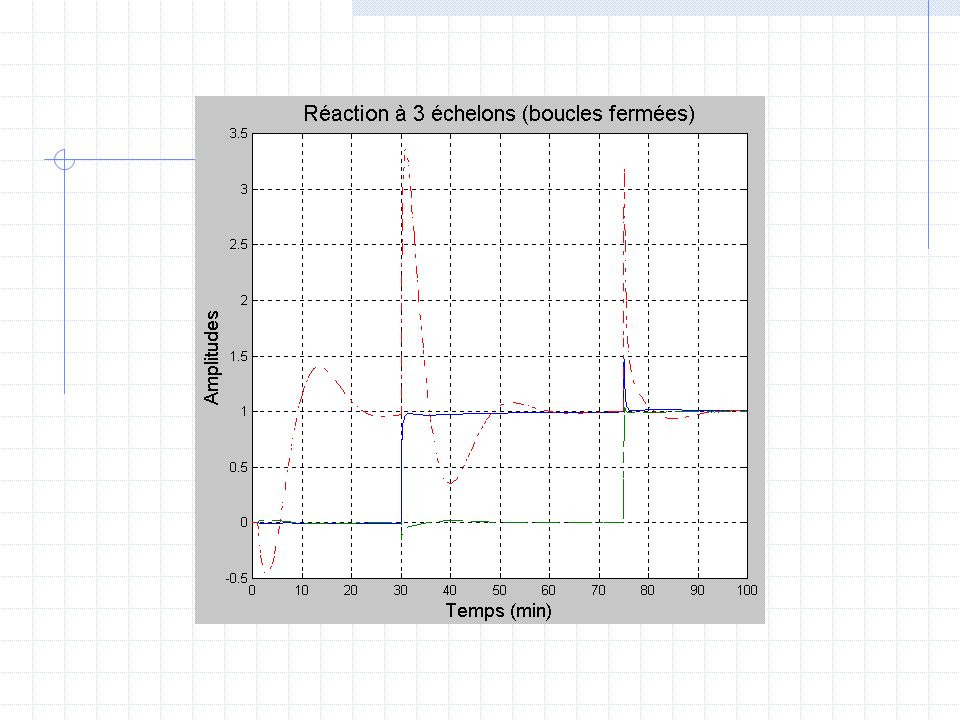
31
Contrôle Malgré les efforts, les effets du couplage se font sentir.

Présentations similaires