Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Commande d’actionneurs à l’aide d’un microprocesseur
8 Moteur pas-à-pas Christian Koechli

2
Objectifs du cours Fonctionnement moteur pas-à-pas
Exemples de réalisation Réalisation de la commande Problèmes liés à la boucle ouverte Asservissement

3
+ - U0 - + U0 N N S N S N S N S N S N N N + - U0 - + U0

4
Classification Fx = ½ dLbb/dx.ib2 + ½ dΛaa/dx.Θa2 + dLab/dx.ib.Θa
Réluctant polarisé (hybride)
")
5
Caractéristiques souhaitables
Peu de couple réluctant (lié à l’aimant seul) Grand nombre de pas par tour Grande densité de couple (vitesse faible) Prix de production très faible
 Grand nombre de pas par tour. Grande densité de couple (vitesse faible) Prix de production très faible.")
6
Exemple: moteur à griffes

7
Principe de fonctionnement
S N N S N S S N N S N S Rotor à aimant

8
Moteur à griffes: fonctionnement
S N I

9
Deuxième phase

11
Moteur à griffes Au moins 2 phases Simplicité de fabrication
Limitation du flux /pertes fer

12
Exemple: moteur hybride

13
Moteur pas à pas hybride:rotor

14
Flux rotorique N N

15
Déphasage des pôles du rotor
N

16
Stator

17
Flux Statorique + - - + N N N N N N S S S S S S S S S S S S

18
Flux Statorique + S N - N N N N - N S +

19
Chemin du flux statorique

20
Chemin du flux rotorique

21
Génération du couple

22
Propriétés des moteurs de ce type (hybrides et à griffes)
Nombre de pas par tour élevé (200 pour les solutions hybrides) Densité de couple élevée Bon-marché Pertes fers limitant la vitesse
 Densité de couple élevée. Bon-marché. Pertes fers limitant la vitesse.")
23
Alimentation électronique
2* pont H Unipolaire= bobinage double

24
Alimentations électroniques: types
2 phases ON => plus de couple Milipas, micropas par modulation de la tension sur les phases

25
- + U0 + - U0 N N S N N N + - U0 - + U0

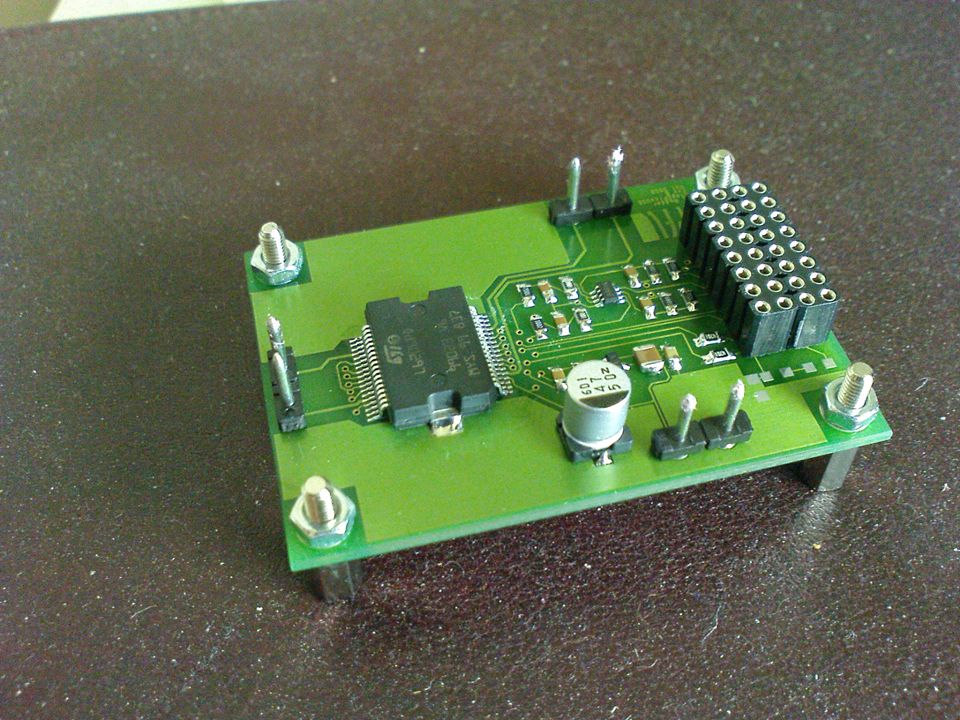
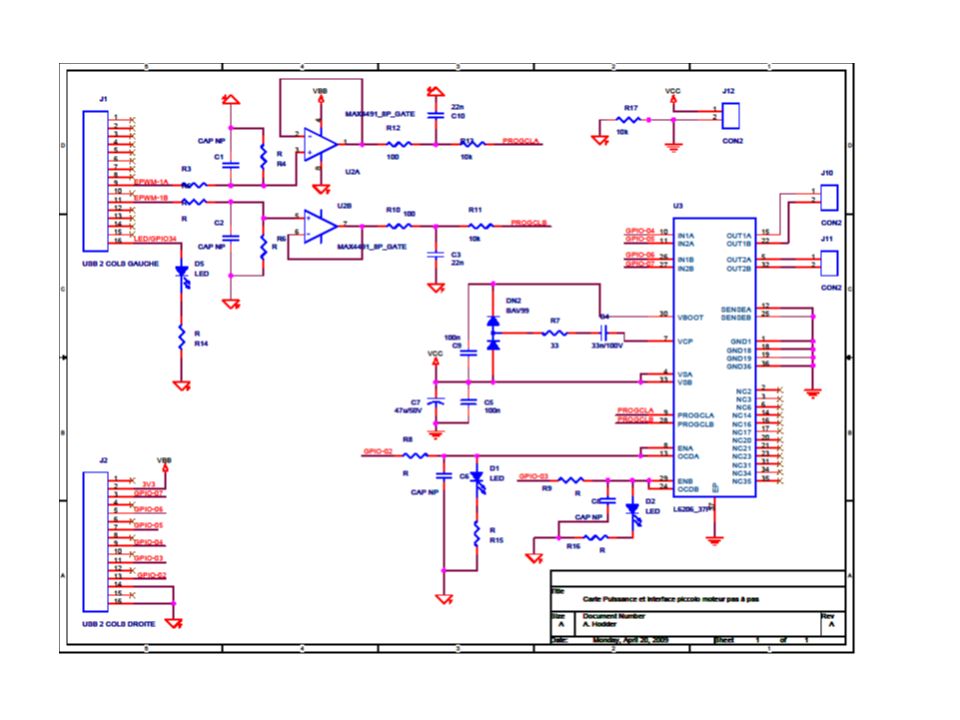
27
Pont intégré L6206

29
Alimentation en boucle ouverte
On impose la tension ou le courant Pas de capteur de position => on doit prendre de la marge Mauvais rendement / mauvaises performances dynamiques Alimentation en milli/micro pas ( 2 phases ON) Facile à implémenter => bon marché
 Facile à implémenter => bon marché.")
30
Asservissement Détection de passage du pas (horlogerie)
Adjonction d’un capteur (précis) Sensorless
 Sensorless.")
31
Objectifs du TP Déplacement d’un moteur pas-à-pas à griffes avec vis pour suivre une consigne de position donnée par l’utilisateur sur le port série Table de commutation Lecture le la consigne et « réglage » de position dans l’interruption

Présentations similaires




>")















