Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Etude cinématique du Robot Rovio.
Etude préliminaire sur le roulement d’une roue au sol. Etude du comportement du robot Roviot par la cinématique graphique.

2
Etude préliminaire. Comparaison entre le comportement d’une roue ordinaire et d’une roue holonome.

3
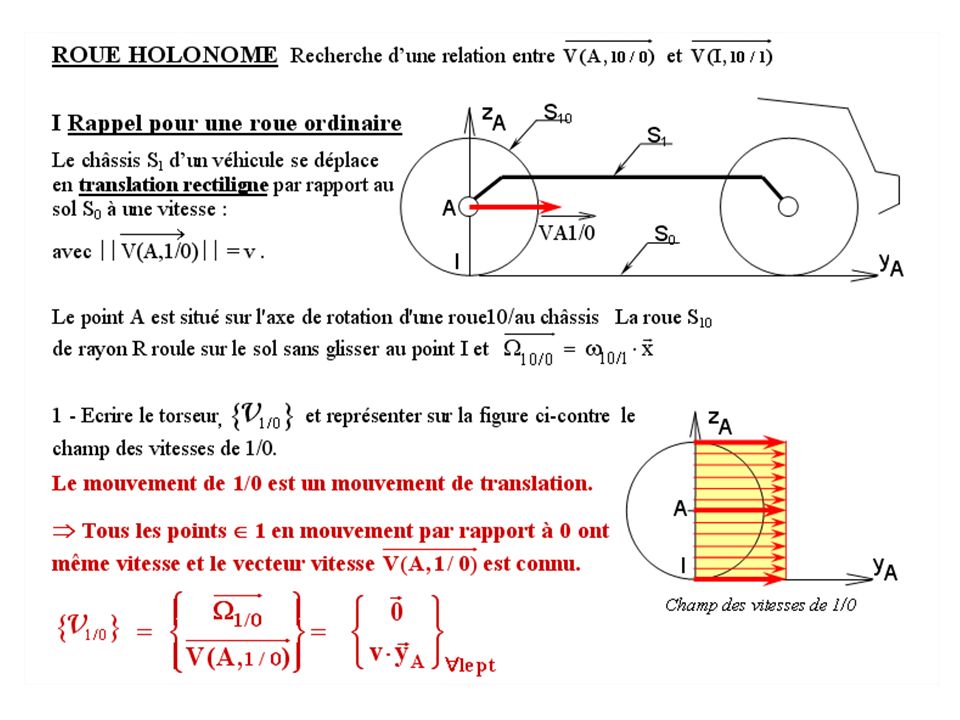
Cherchons d’abord une relation entre et
La rotation de la roues 10 par rapport au corps 1 permet de déterminer les vitesses des points I et I’ : et I’ A roue 10 I Cherchons d’abord une relation entre et

4
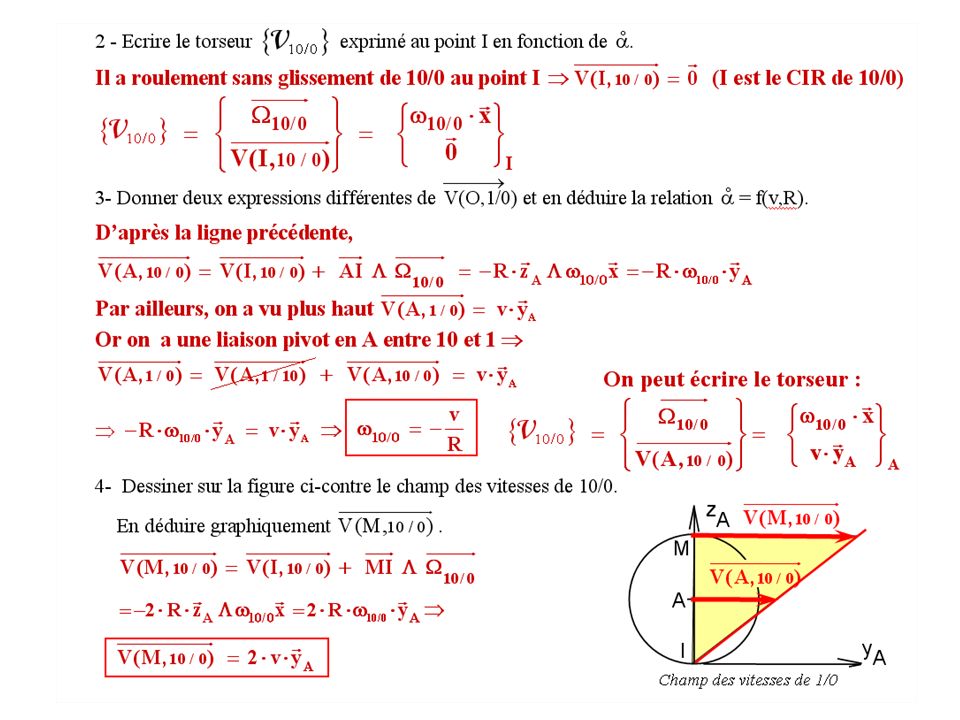
Cherchons d’abord une relation entre et
La rotation de la roues 10 par rapport au corps 1 permet de déterminer les vitesses des points I et I’ : et I’ A roue 10 I Cherchons d’abord une relation entre et

11
Cinématique graphique
Robot Rovio - Etude dans le cas général - Etude dans le cas général - Etude du cas de la translation - Etude du cas de la rotation

12
? On en déduit la projection de la vitesses
sur la direction perpendiculaire à l’axe de rotation de la roue 10 par rapport au corps 1. On la note ? On ne connaît pas la composante

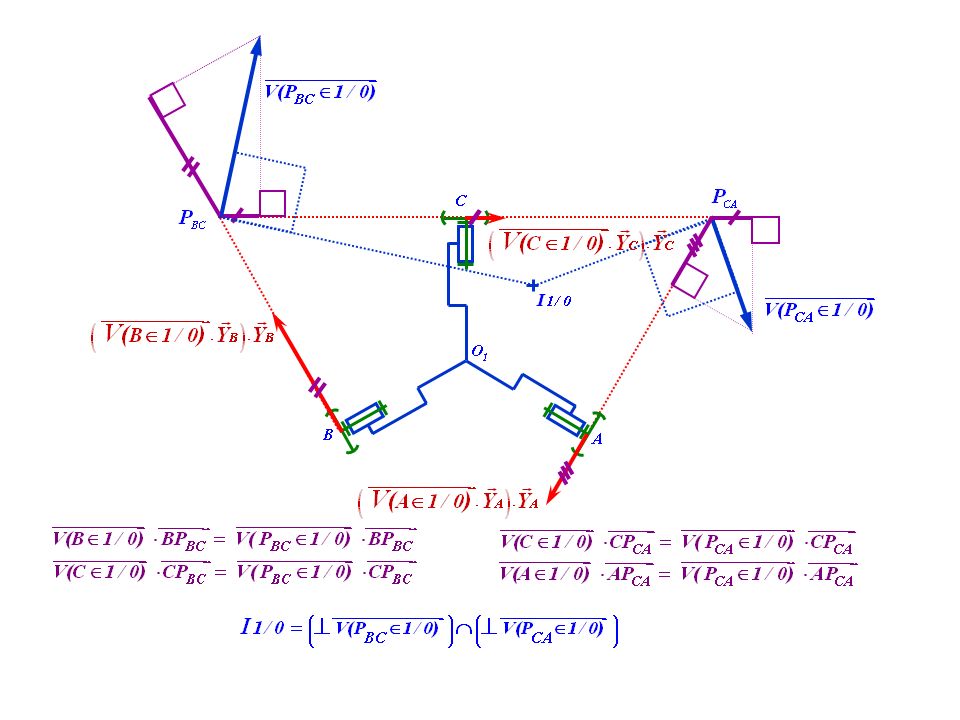
13
On se donne aussi les projections pour les points B et C
Question : Déterminer le CIR de 1/0. et en déduire les vitesses et

17
Cinématique graphique
Robot Rovio - Etude dans le cas général - Etude du cas de la translation - Etude du cas de la translation - Etude du cas de la rotation

18
? ? Etude d’un mouvement particulier de 1/0 On donne :
Appliquer deux fois l’équiprojectivité à partir des deux projections non nulles. En déduire ? ?

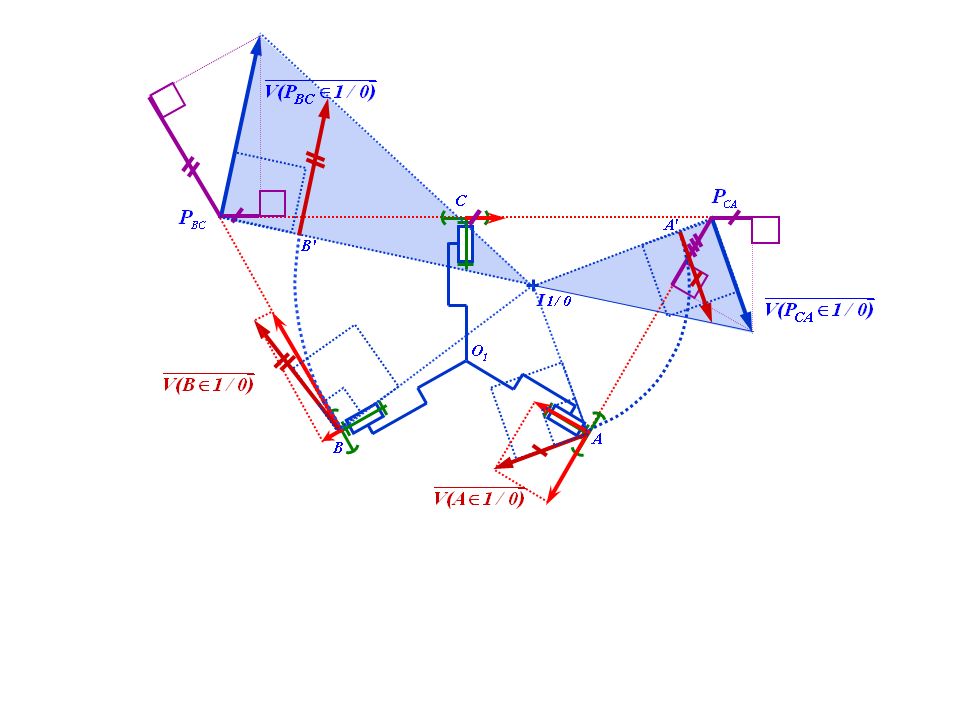
19
? ? Etude d’un mouvement particulier de 1/0
Appliquer deux fois l’équiprojectivité Entre les points C et PAB En déduire la nature du mouvement ? ? Dans ce mouvement plan de 1/0, deux points on même vitesse : Il s’agit donc d’un mouvement de translation. En particulier ,

20
Cinématique graphique
Robot Rovio - Etude dans le cas général - Etude du cas de la translation - Etude du cas de la rotation - Etude du cas de la rotation

21
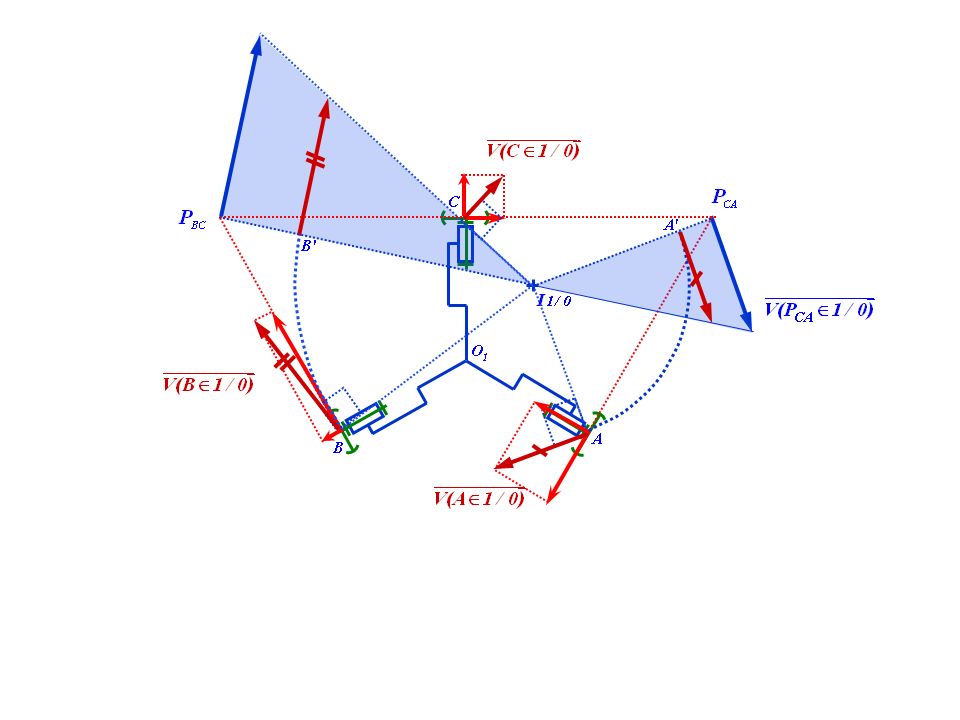
? ? ? FIN Etude du mouvement de rotation de 1/0
Attention, Montrer que le point O1 est CIR du mouvement n’est pas immédiat. En effet, on ne connaît pas les vitesses en A, B, C de 1/0 Appliquer deux fois l’équiprojectivité En déduire ? ? FIN

22
? ? ? FIN Etude du mouvement de rotation de 1/0
Appliquer maintenant l’équiprojectivité entre PAB et C En déduire ? ? Or on voit que FIN Maintenant on peut dire que

Présentations similaires


 Trajectoire d’un mobile>")


 Moments angulaires>")








 Diagramme d’interaction (0,5)>")






