Télécharger la présentation
3
Les moteurs électriques
Il existe un grand nombre de type de moteurs : Moteurs à courant continu Moteurs asynchrones Moteurs synchrones Moteurs pas à pas…

4
moteur à courant continu
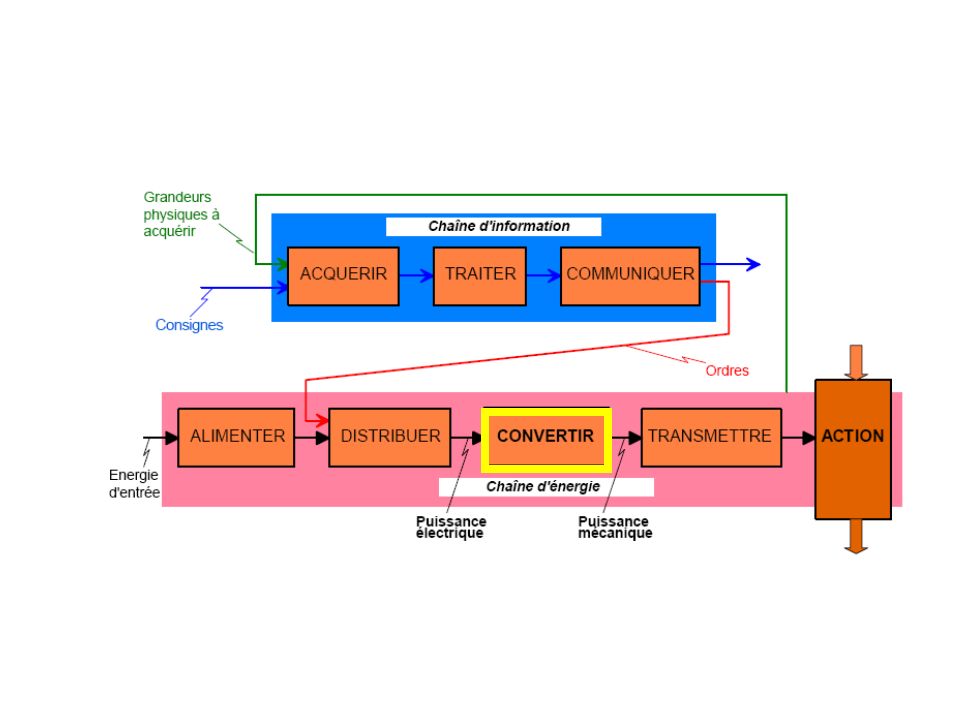
Axe de sortie Broches électriques Un moteur électrique c’est un actionneur. Il crée un mouvement de rotation à partir d’énergie électrique. Moteur électrique Énergie électrique mécanique Corps-bâti Si on regarde à l’intérieur :

5
moteur à courant continu
Il y a deux ensembles cinématiques : Le rotor : Qui tourne et transmet le mouvement. Le stator : Qui est fixé au bâti.

6
moteur à courant continu
Le stator (ensemble fixe): On distingue : Deux aimants Des balais Distribuant l’électricité au rotor. Champ magnétique
: On distingue : Deux aimants. Des balais. Distribuant l’électricité au rotor. Champ magnétique.")
7
moteur à courant continu
Le rotor (ensemble tournant): On distingue : Un collecteur qui reçoit l’électricité provenant des balais. Des bobines
: On distingue : Un collecteur qui reçoit l’électricité provenant des balais. Des bobines.")
8
moteur à courant continu
Le rotor (ensemble tournant): Force générée Champ magnétique Courant électrique Loi de Laplace : Un fil conducteur d’électricité (I) qui baigne dans un champ magnétique (B) est alors soumis à une force (F). B I F
: Force générée. Champ magnétique. Courant électrique. Loi de Laplace : Un fil conducteur d’électricité (I) qui baigne dans un champ magnétique (B) est alors soumis à une force (F). B. I. F.")
9
moteur à courant continu
Le rotor (ensemble tournant): Forces générées Les forces rouges font tourner le rotor. Les Vertes ne servent à rien. Champ magnétique
: Forces générées. Les forces rouges font tourner le rotor. Les Vertes ne servent à rien. Champ magnétique.")
10
moteur à courant continu
Le rotor (ensemble tournant): Forces générées Globalement on a un couple moteur Champ magnétique
: Forces générées. Globalement on a un couple moteur. Champ magnétique.")
11
moteur à courant continu
Le rotor (ensemble tournant): Globalement on a un couple moteur anim electricmotor
: Globalement on a un couple moteur. anim electricmotor.")
12
moteur à courant continu
Le rotor (ensemble tournant): Le courant électrique passant dans des fils ayant une certaine résistance « R », l’effet joule « RI2 » entraîne une perte d’énergie par chaleur. C’est là la principale perte énergétique des moteurs électrique mais elle reste assez faible comparativement à d’autres actionneurs.
: Le courant électrique passant dans des fils ayant une certaine résistance « R », l’effet joule « RI2 » entraîne une perte d’énergie par chaleur. C’est là la principale perte énergétique des moteurs électrique mais elle reste assez faible comparativement à d’autres actionneurs.")
13
RENDEMENT : h = Pu / Pa moteur à courant continu Energie Moteur
électrique mécanique Pertes Puissance utile (puissance mécanique) Pu = Cu x W RENDEMENT : h = Pu / Pa Puissance absorbée (puissance électrique) Pa = U x I Puissance utile Pu = Pa - pertes
 Pu = Cu x W. RENDEMENT : h = Pu / Pa. Puissance. absorbée. (puissance électrique) Pa = U x I. Puissance utile Pu = Pa - pertes.")
14
moteur à courant continu
résistance de l’induit Dépend de la vitesse de rotation : E = K x W Force électromotrice ou fcem

15
Le moteur tourne « vite » .
(3000 tr/minutes ou plus) Le couple moteur est assez faible On y remédie (dans la plupart des cas) en ajoutant un réducteur. Le réducteur : Couple de sortie : Vitesse de rotation : Réducteur
 Le couple moteur est assez faible. On y remédie (dans la plupart des cas) en ajoutant un réducteur. Le réducteur : Couple de sortie : Vitesse de rotation : Réducteur.")
16
exercice moteur à courant continu La plaque signalétique d’un moteur
à courant continu indique : Pu = 36,3kw W = 120,4 rad/s U = 440V I = 68,5A Calculer le couple utile, la puissance absorbée, le rendement.

17
exercice moteur à courant continu
La plaque signalétique d’un moteur à courant continu indique : Pu = 36,3kw W = 120,4 rad/s U = 440V I = 68,5A Calculer le couple utile, la puissance absorbée, le rendement. exercice Pu = Cu x W d’où Cu = Pu / W = 301,4 N.m Pa = U x I = 42 kW h = Pu / Pa = 36,3kw/42kw = 0,86 = 86%

18
moteur à courant continu
Couple de démarrage Le couple que fournit le moteur et la vitesse de rotation sont dépendants l’un de l’autre. Vitesse à vide

19
moteur à courant continu
De la courbe couple vitesse se déduit la courbe puissance utile du moteur Pu = C(N.m).W(rad/s) Pu = (2p/60). C(N.m). N(tr/min)
.W(rad/s) Pu = (2p/60). C(N.m). N(tr/min)")
20
moteur à courant continu
Le rendement d’un moteur est le rapport entre la puissance mécanique utile qu’il peut fournir et la puissance qu’il absorbe. La puissance utile et la puissance absorbée variant différemment avec la vitesse de rotation, le rendement est lui aussi fonction de la vitesse du moteur. Le rendement est maximum pour une vitesse de rotation donnée supérieure à la moitié de la vitesse à vide.

21
exercice TONDEUSE ROBOT RL500

22
exercice TONDEUSE ROBOT RL500
Les courbes fournies donnent, en fonction du couple résistant: - la vitesse de rotation du rotor en tours par minute, - la puissance électrique absorbée, - la puissance mécanique disponible sur l'arbre moteur, le rendement. À l'aide du tableau de valeurs numériques, remplir le tableau récapitulatif:

23
exercice

24
h maxi à vide Bloqué P maxi

25
exercice TONDEUSE ROBOT RL500
Les courbes fournies donnent, en fonction du couple résistant: - la vitesse de rotation du rotor en tours par minute, - la puissance électrique absorbée, - la puissance mécanique disponible sur l'arbre moteur, le rendement. À l'aide du tableau de valeurs numériques, remplir le tableau récapitulatif:

26
exercice moteur à courant continu FAIRE VARIER LA VITESSE
HACHEUR SÉRIE Bloqué v Saturé Vcc

27
exercice moteur à courant continu FAIRE VARIER LA VITESSE ?????
HACHEUR SÉRIE ?????

28
moteur à courant continu
FAIRE VARIER LA VITESSE Modulation par Largeur d’Impulsion (MLI ou PWM)
")
29
moteur à courant continu
INVERSER LE SENS DE ROTATION Commande par pont en H

30
exercice Afin d'inverser le sens de rotation du moteur M on utilise le schéma électrique ci-dessous. Tracer sur ce schéma, le sens de circulation des courants pour les 2 sens de fonctionnement du moteur (utiliser 2 couleurs différentes). Dans chaque cas pour la tension aux bornes du moteur Umot compléter le tableau en indiquant l'état de chaque transistor (P pour passant ou N pour non passant). D’après bac 2006 compléter le schéma pour assurer la commande par les ordres A et B.
. Dans chaque cas pour la tension aux bornes du moteur Umot compléter le tableau en indiquant l état de chaque transistor (P pour passant ou N pour non passant). D’après bac compléter le schéma pour assurer la commande par les ordres A et B.")
31
exercices sup. A/ Le moteur utilisé pour la commande d’ouverture et de fermeture de la porte STANLEY est un moteur à courant continu de type AXEM de vitesse 1500 tr/min (Tension nominale: 110v, Résistance d’induit R: 1,8 W, Coeff du couple du moteur Kt: 0,286 Nm/A, Coeff de f.e.m du moteur Ke: 0,286 v/rad/s) CALCULER la force électromotrice du moteur et DONNER son schéma équivalent B/ Soit un moteur de 8 kW alimenté sous U=460v prévu pour 1580 tr/min, couple utile 48 N.m, courant nominal de 21A et de résistance d’induit 2,78 W. Q1: CALCULER sa vitesse angulaire Q2: DONNER son schéma équivalent (régime continu) et en déduire la f.e.m du moteur Q3: En DEDUIRE le coefficient de f.e.m du moteur
 CALCULER la force électromotrice du moteur et DONNER son schéma équivalent. B/ Soit un moteur de 8 kW alimenté sous U=460v prévu pour 1580 tr/min, couple utile 48 N.m, courant nominal de 21A et de résistance d’induit 2,78 W. Q1: CALCULER sa vitesse angulaire. Q2: DONNER son schéma équivalent (régime continu) et en déduire la f.e.m du moteur. Q3: En DEDUIRE le coefficient de f.e.m du moteur.")