Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Détecteurs de proximité
Choix d ’un détecteur de proximité Courant résiduel Ir Tension de déchet Ud

2
Exemple Détecteur de proximité inductif, deux fils, alimentation non polarisée Réf. 3S1.M DA 210 TELEMECANIQUE Courant résiduel (Ir), état ouvert 0.6 mA Tension de déchet (Ud), état fermé 5.2 V Carte automate SIEMENS Module d ’entrée de l ’API SIEMENS Réf. 6E S MB1 Caractéristiques d ’entrée pour un signal 4,5 mA sous 24V
, état ouvert 0.6 mA. Tension de déchet (Ud), état fermé 5.2 V. Carte automate SIEMENS. Module d ’entrée de l ’API SIEMENS. Réf. 6E S MB1. Caractéristiques d ’entrée pour un signal 4,5 mA sous 24V.")
3
Branchement Technique 2 fils Alimentation en courant continu (DC)
")
4
Branchement Technique 2 fils
Alimentation en courant alternatif ( AC) et alternatif - continu (AC-DC)
 et alternatif - continu (AC-DC)")
5
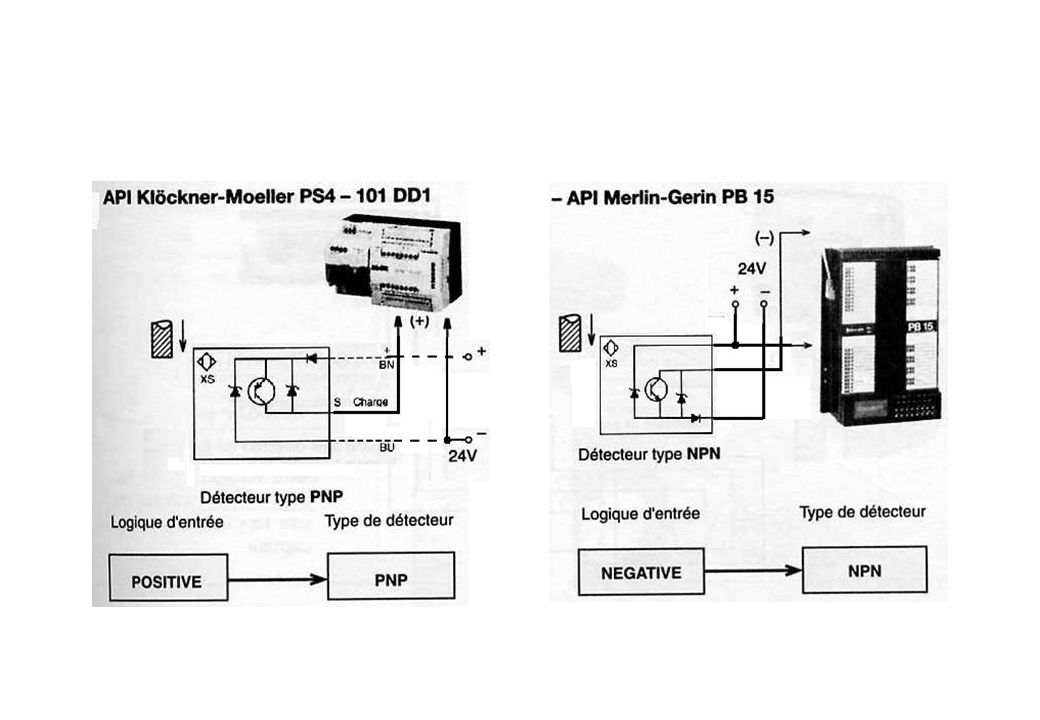
Branchement Technique 3 fils

7
(-)
")
8
Carte d ’entrée automate
Détecteur mécanique Mise en œuvre d ’interrupteur de position Alimentation et raccordement Unité de traitement A.P.I. Alimentation Carte d ’entrée automate Raccordement Détection

9
Unité de traitement Raccordement A.P.I. Alimentation
Mise en œuvre d ’interrupteur de position Alimentation et raccordement Unité de traitement A.P.I. Raccordement Alimentation

10
Détecteurs photo-électriques
Mise en oeuvre

11
Codeurs Optiques Choix et mise en œuvre d ’un codeur optique incrémental Exemple d ’utilisation d ’un codeur optique incrémental Caractéristiques de la machine : Longueur des profilés : 0.02 m < L < 1m Précision de la longueur de coupe : 1 mm Vitesse de rotation des rouleaux d ’entraînement : 60 tr . Min -1 La prise de cote de à longueur du profilé est contrôlée par un codeur incrémental. Contrôle barre en position initiale avant prise de cote, longueur pièce (L), réalisé par le détecteur inductif.
, réalisé par le détecteur inductif.")
12
CODEUR CHOISI / RESOLUTION POINTS / TOUR
Choix et mise en œuvre d ’un codeur optique incrémental Choix du codeur incrémental Calcul du nombre de point (n) nombre d ’impulsion électrique par tour du codeur. K : rapport de réduction entre le rouleau et le codeur axe du codeur monté sur l ’axe du rouleau K = 1 P : conversion du mouvement de rotation en mouvement de translation D ’où Le nombre de points par tour d ’un capteur se nomme la résolution CODEUR CHOISI / RESOLUTION POINTS / TOUR
 nombre d ’impulsion électrique par tour du codeur. K : rapport de réduction entre le rouleau et le codeur. axe du codeur monté sur l ’axe du rouleau K = 1. P : conversion du mouvement de rotation en mouvement de translation. D ’où. Le nombre de points par tour d ’un capteur se nomme la résolution. CODEUR CHOISI / RESOLUTION POINTS / TOUR.")
13
Choix et mise en œuvre d ’un codeur optique incrémental
Calcul de la fréquence (f) des impulsion de sortir du codeur N : vitesse de l ’axe d ’entraînement en tr/mn R : résolution du codeur choisi en points/tour. Remarque : pour un codeur incrémental, il est indispensable de calculer la fréquence maximale d ’utilisation afin de s ’assurer des compatibilités des caractéristiques électriques avec les entrées du système de traitement (fréquence de traitement des cartes d ’entrées de base, des cartes de comptage rapide, des comptages rapides intégrés à l ’automate…) Caractristiques du codeur optique incrémental choisi : TELEMECANIQUE XCC - HD 0 H 20 Étage de sortie PNP nombre de voies, A,B,Z Résolution 360 p.tr-1
 des impulsion de sortir du codeur. N : vitesse de l ’axe d ’entraînement en tr/mn. R : résolution du codeur choisi en points/tour. Remarque : pour un codeur incrémental, il est indispensable de calculer la fréquence maximale d ’utilisation afin de s ’assurer des compatibilités des caractéristiques électriques avec les entrées du système de traitement (fréquence de traitement des cartes d ’entrées de base, des cartes de comptage rapide, des comptages rapides intégrés à l ’automate…) Caractristiques du codeur optique incrémental choisi : TELEMECANIQUE XCC - HD 0 H 20. Étage de sortie PNP. nombre de voies, A,B,Z. Résolution 360 p.tr-1.")
14
Choix et mise en œuvre d ’un codeur optique incrémental
Raccordement

15
Choix et mise en œuvre d ’un codeur optique absolu
Exemple : contrôle du positionnement d ’un plateau Contrôle du positionnement d ’un plateau dont le déplacement linéaire est obtenu par une chaîne cinématique avec vis à billes entraînées par un moteur asynchrone Vis à bille : Pas : 20 mm * tour -1 Longueur : 1 mètre

16
Calculs : Calcul du nombre de points (n) nombre de solutions codables par tour K : rapport de réduction entre la vis et l ’axe du codeur si l ’axe du codeur est monté directement sur l ’axe de la vis : K = 1 P : conversion du mouvement de rotation en mouvement de translation pas de lavis : 20 mm.tr-1 Précision du positionnement 0.01 mm n = points par tour : RESOLUTION DU CODEUR Il faut choisir un codeur absolu de plus de points en puissance de 2 = points Si l ’on souhaite également connaître le nombre de tours effectuées, il faut choisir un codeur absolu multi-tours permettant de compter au minimum jusqu ’à : Capteur choisi :

17
Choix et mise en œuvre d ’un codeur optique

18
Choix et mise en œuvre d ’un codeur optique Exemple
Calcul du déplacement du plateau Position initiale : état de sorties du codeur G1 à G17 : état binaire (0) soit l ’état suivant des sorties du codeur : Code gray Code Binaire Code Décimal Nombre de points pour un déplacement de 1 mètre Déplacement du plateau pour le code Gray ci-dessus :
 soit l ’état suivant des sorties du codeur : Code gray. Code Binaire. Code Décimal. Nombre de points pour un déplacement de 1 mètre. Déplacement du plateau pour le code Gray ci-dessus :")
19
Rappel sur le fonctionnement des Interfaces d ’Entrée et Sortie Tout Ou Rien (T.O.R.)
A.P.I. Schéma de principe : interface d ’entré 24 V Alternatif

20
Rappel sur le fonctionnement des Interfaces d ’Entrée et Sortie Tout Ou Rien (T.O.R.)
A.P.I. Schéma de principe : interface de sortie à triac 24 V Alternatif

Présentations similaires