Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Deux systèmes de coordonnées : : le repère fixe dans lespace : le repère attaché au corps Les équations de mouvement de lavion:

2
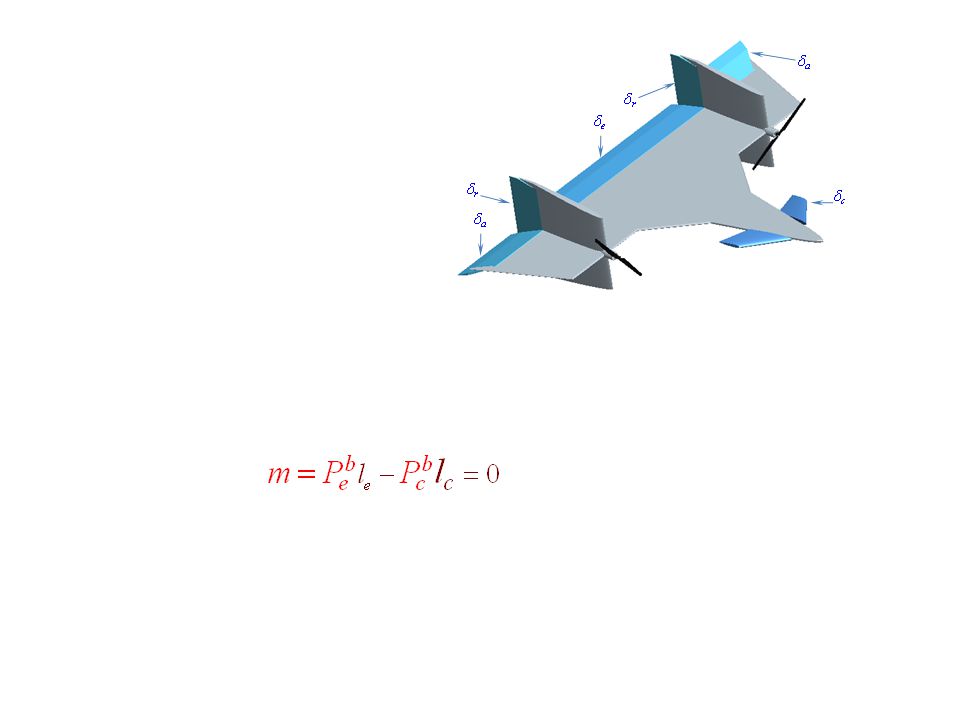
x y z x y x z A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder

3
x y z z x y : la vitesse de rotation de chaque moteur A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder slip: slipstream Théorème de Bernoulli:

5
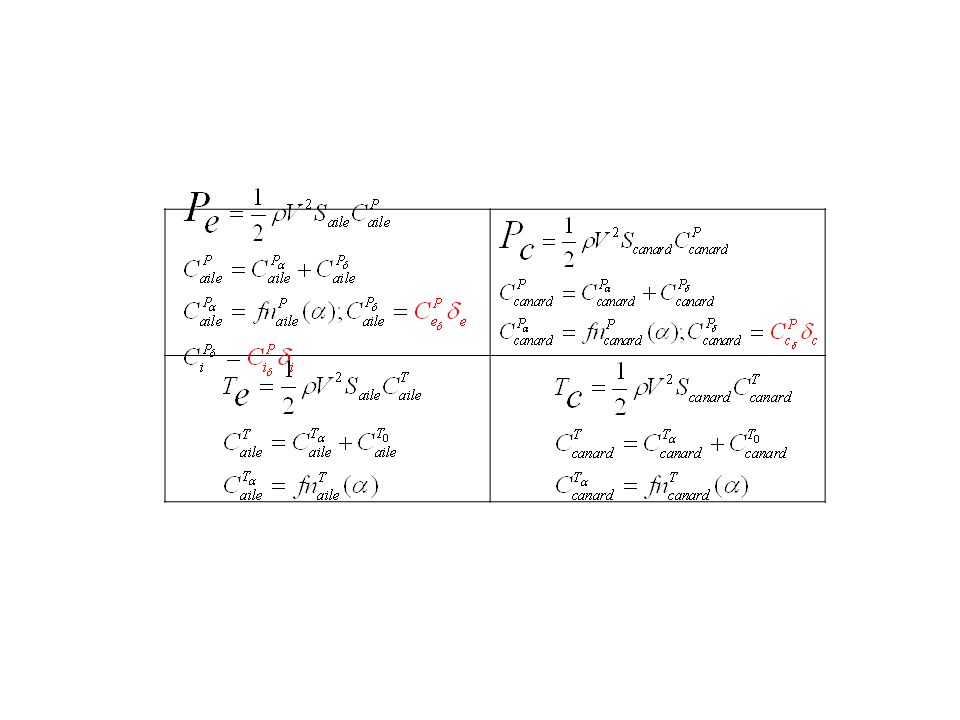
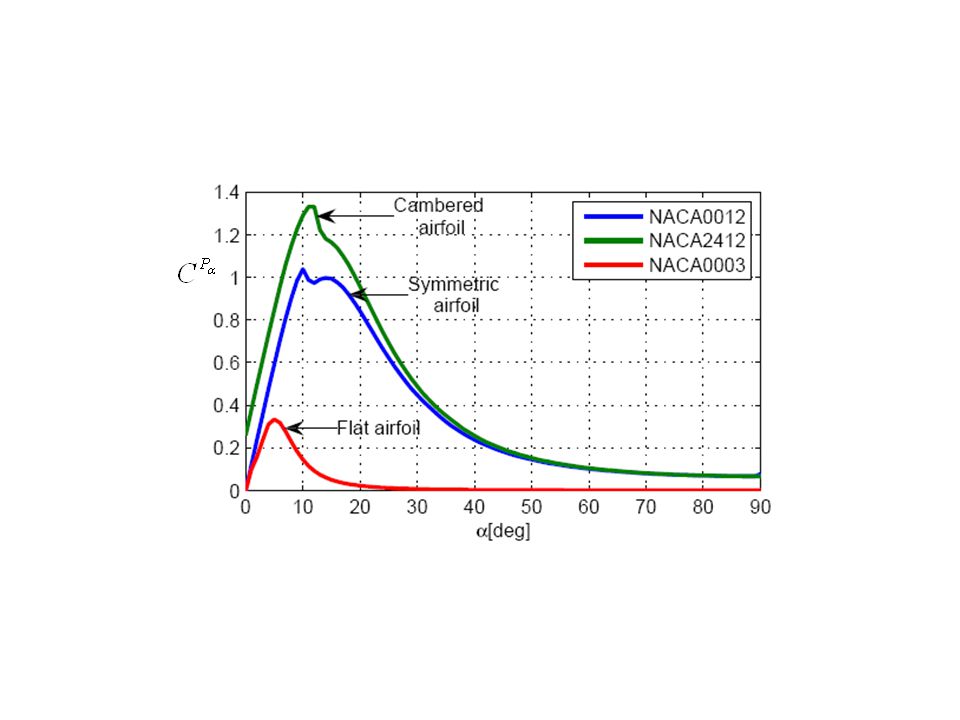
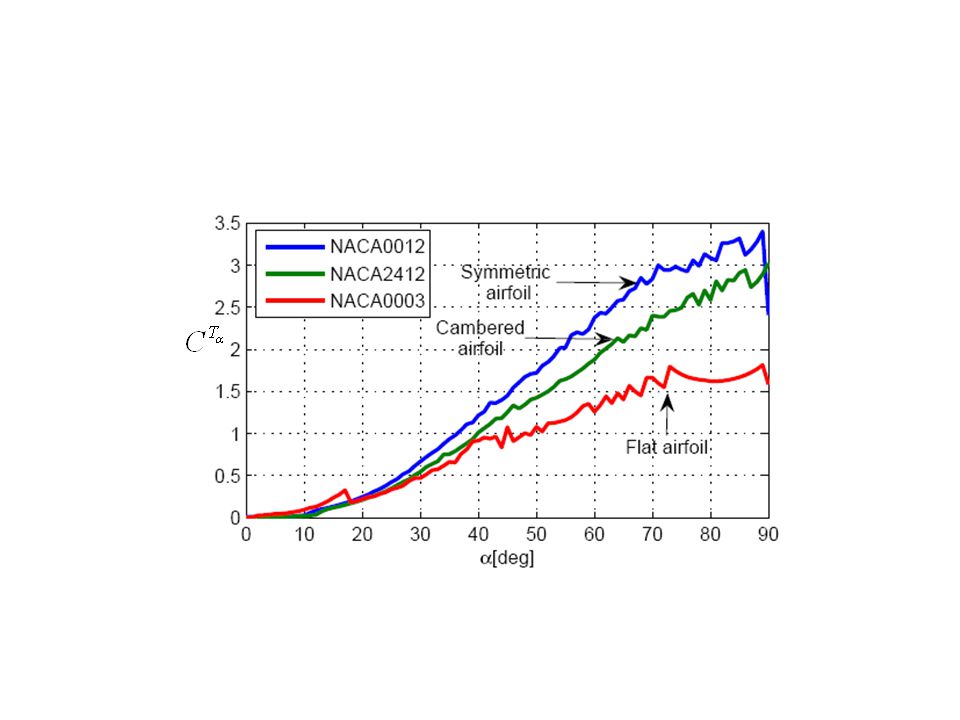
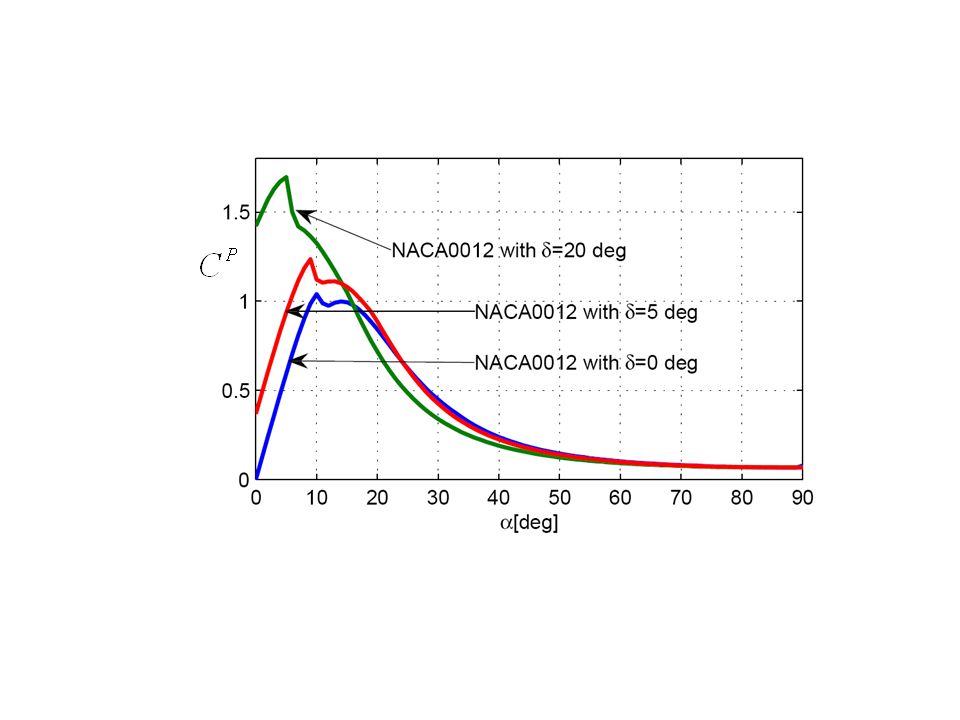
free: freestream fn(): fonction nonlinéaire dépendant à alpha et le profil des ailes (voir la figure)
: fonction nonlinéaire dépendant à alpha et le profil des ailes (voir la figure)")
7
Contrôleur de vol vertical Décélération Accélération Contrôleur de vol horizontal Contrôleur de décollage Trans. flag = 0 Contrôleur de transition θ < 10° Trans. flag = 0 Contrôleur de transition θ > 80° flag = 0 Contrôleur datterrissage flag = 1 NON OUI NON OUI Intervention de lopérateur en cas urgent Radio Actionneurs (servomoteurs, BLDCs) Actionneurs (servomoteurs, BLDCs) Avion Convertible Estimation détats Radio.flag 0 1 Changement des contrôleurs Trans.flag flag SYSTÈME DE COMMANDE
 Actionneurs (servomoteurs, BLDCs) Avion Convertible Estimation détats Radio.flag 0 1 Changement des contrôleurs Trans.flag flag SYSTÈME DE COMMANDE.")
11
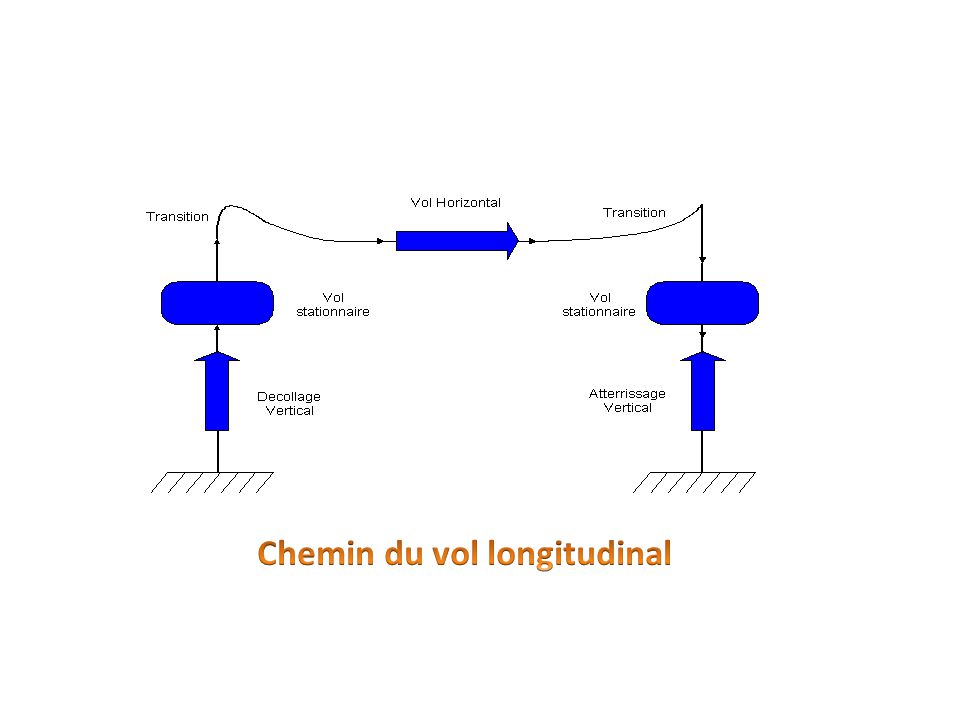
Décollage vertical Vol stationnaire Vol stationnaire Transition à lhorizontale Transition à la verticale Vol horizontal Atterrissage vertical : Trajectoire de vol : Orientation des deux rotors davant

18
Vertical takeoff Hover mode Transition to horizontal Transition to vertical Horizontal flight Vertical Landing : Flight Path : Orientation of the drone (Arrowhead = front of vehicle)
")
20
z x y z x y

22
z x y x y z

23
x y z x y x z A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder

24
x y z z x y : la vitesse de rotation de chaque moteur A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder slip: slipstream Théorème de Bernoulli:

Présentations similaires




 Lois de pilotage A) Canal TANGAGE (Pitch)>")















 RÉVISION : MOMENTS ET COUPLES>")


