Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Avion convertible à décollage et atterrissage vertical
Directeurs de thèse: Rogelio LOZANO Isabelle FANTONI-COICHOT Présenté par TA Duc Anh

2
Plan 1. Introduction 2. Attitude 3. Avion convertible 4. Stratégie de commande 5. Conclusion

3
1. Introduction Applications des Véhicules Aériens Autonomes:
Domaine militaire: les missions de reconnaissance la surveillance Domaine civile : la surveillance de trafic routier la surveillance et la protection de l’environnement la recherche et le secours des blessés la gestion de grandes infrastructures telles que les lignes haute tension, les barrages et les ponts.

4
Objectif de la thèse Un drone combinant: Un avion:
la manœuvrabilité des véhicules à voilure tournante (hélicoptères): l'avance lente, le décollage et l’atterrissage vertical les performances d'un véhicule à voilure fixe (avions): l'avance rapide, la longue portée et une endurance supérieure Un avion: décollage/atterrissage vertical autonome vol stationnaire (hover) transition autonome vers un vol d’avancement rapide pas de piste de décollage
: l avance lente, le décollage et l’atterrissage vertical. les performances d un véhicule à voilure fixe (avions): l avance rapide, la longue portée et une endurance supérieure. Un avion: décollage/atterrissage vertical autonome. vol stationnaire (hover) transition autonome vers un vol d’avancement rapide. pas de piste de décollage.")
5
Difficultés rencontrées
bien conçu avant de réaliser la transition du vol vertical au vol horizontal Heliwing de Boeing : perdu lors de sa première transition T-wing de Hugh Stone: T-wing de Hugh Stone [University of Sydney] Heliwing chez Boeing

6
2. Attitude Deux systèmes de coordonnées : Les équations cinématiques:
: le repère fixe dans l’espace : le repère attaché au corps Les équations cinématiques: : la matrice de rotation : le vecteur de vitesse angulaire du repère par rapport au repère Singularité lorsque où

7
Quaternion Matrice de rotation:
La multiplication de deux quaternions Erreur d’attitude

8
Capteurs utilisés pour l'estimation de l'attitude

9
3. Avion convertible 3.1 Forces et Couples Aérodynamiques
3.2 Actionneur 3.3 Structure mécanique

10
3.1 Forces et Couples Aérodynamiques
Portance: : la masse volumique de l’air : la vitesse de l’air : la surface de référence sur l’aile : le coefficient de portance

11
3.1 Forces et Couples Aérodynamiques
Traînée: : le coefficient de traînée : coefficient constant de la traînée parasite Moment de Tangage :

12
3.2 Actionneur Théorème de Bernoulli:

13
3.3 Structure mécanique Les équations de mouvement :
Vol vertical (en mode hélicoptère) Force et torque issues des actionneurs
 Force et torque issues des actionneurs.")
14
Vol vertical Hypothèses: La traînée négligeable
force aérodynamique est fournie par la déflection des gouvernes aucun vent latéral

15
Vol horizontal

16
Dynamique longitudinale
Forces de l'aile Forces du canard Portant Traînée

17
4. Stratégie de commande

18
Loi de commande Pour commander l’altitude Pour commander l’attitude
Une simple trajectoire – le profil trapézoïdal de vitesse

19
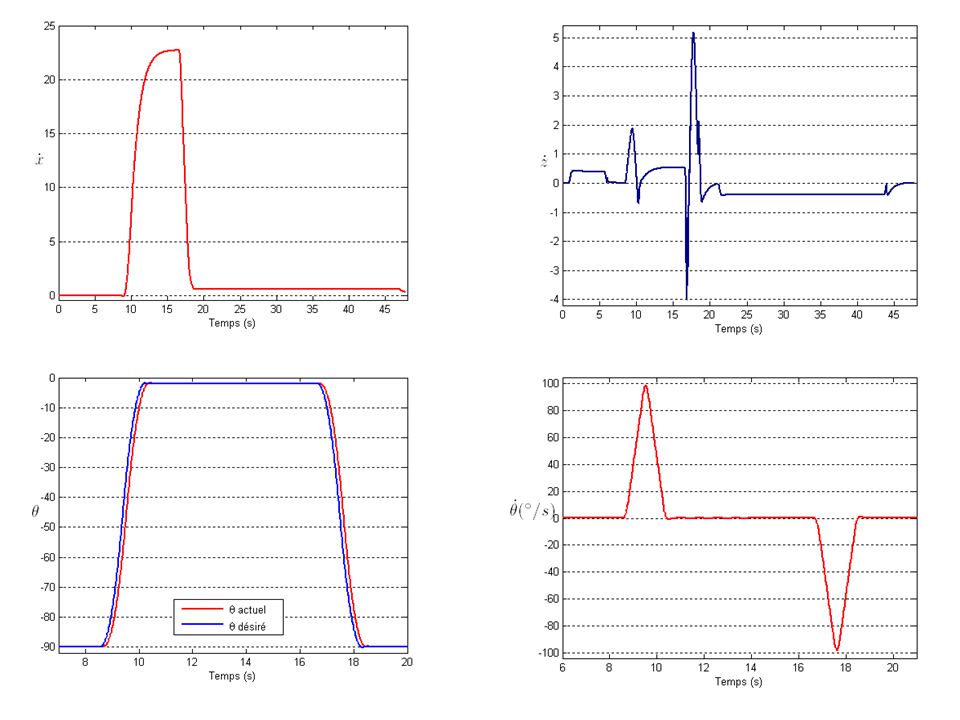
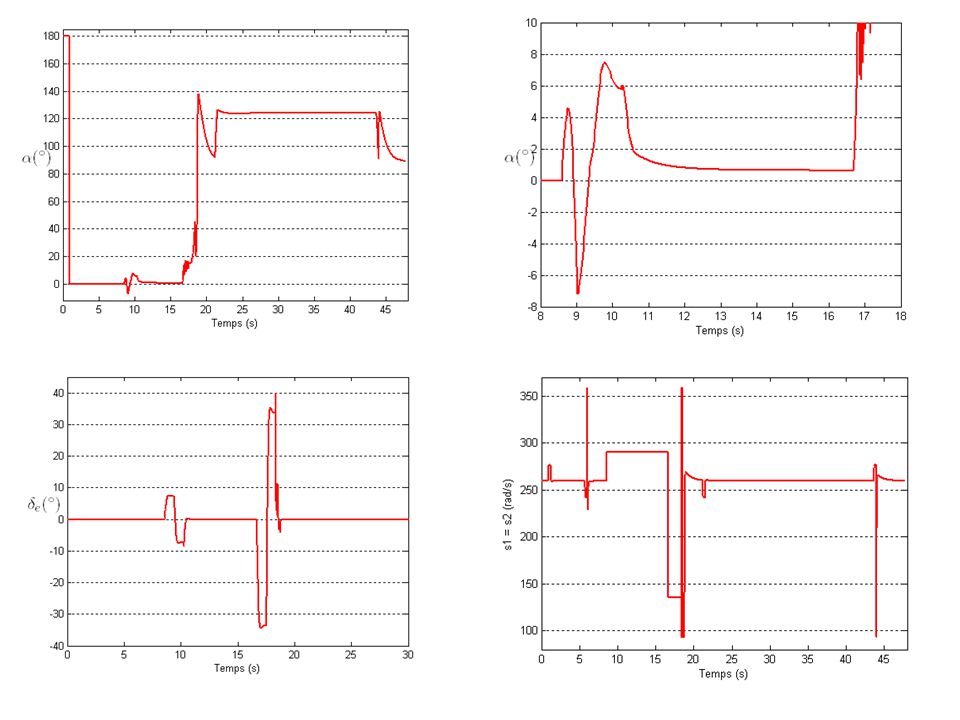
Résultats de simulation

22
5. Conclusion Conclusions générales:
La partie la plus importante a été résolue La loi de commande simple et applicable Perspectives: Changement correct des paramètres des systèmes Prise en compte la modèle latéral dans la modèle dynamique du drone Étude la robustesse de la loi de commande par rapport aux perturbations externes et par rapport aux erreurs dans le modèle Conception l'avion convertible Faire la carte électronique et Programmer le microcontrôleur avec la loi de commande proposée Tester la stratégie de commande dans la réalité

23
Merci de votre attention

Présentations similaires




 et C>")




 Le solide indéformable>")









