Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
5.1 SYSTÈME DÉQUATIONS LINÉAIRES Cours 13

2
Au dernier cours nous avons vus Léquations vectoriel et léquation normale dun plan. Lintersection de deux plans. Langle entre deux plans. La distance entre un point et un plan.

3
Aujourdhui, nous allons voir Les systèmes déquations linéaires. Un algorithme pour les résoudre.

4
Définition: Une équation linéaire est nimporte quelle expression de la forme; oùet lessont des variables. Une solution de léquation linéaire est un n-plettel que Solutionner une équation linéaire revient à trouver lensemble de toutes ses solutions. Définition:

5
Un système déquations linéaires est un ensemble déquations linéaires. On met une accolade au début pour les délimiter. Les indices ici servent à indiquer à quelle variable et à quelle équation un coefficient appartient. Une solution dun système déquations linéaires est un n-uplet qui est solution de chaque équation du système. Définition:

6
Exemple: a comme solution Le système déquations linéaires suivant car et

7
On a vue comment solutionner un système déquations linéaires de 2 équations et 2 inconnues ainsi que de 3 équations et 3 inconnues avec la méthode de Cramer. On aimerait avoir une méthode pour solutionner des systèmes déquations de n équations et m inconnues.

8
Quest ce quon peut faire avec une équation sans changer lensemble solution?

9
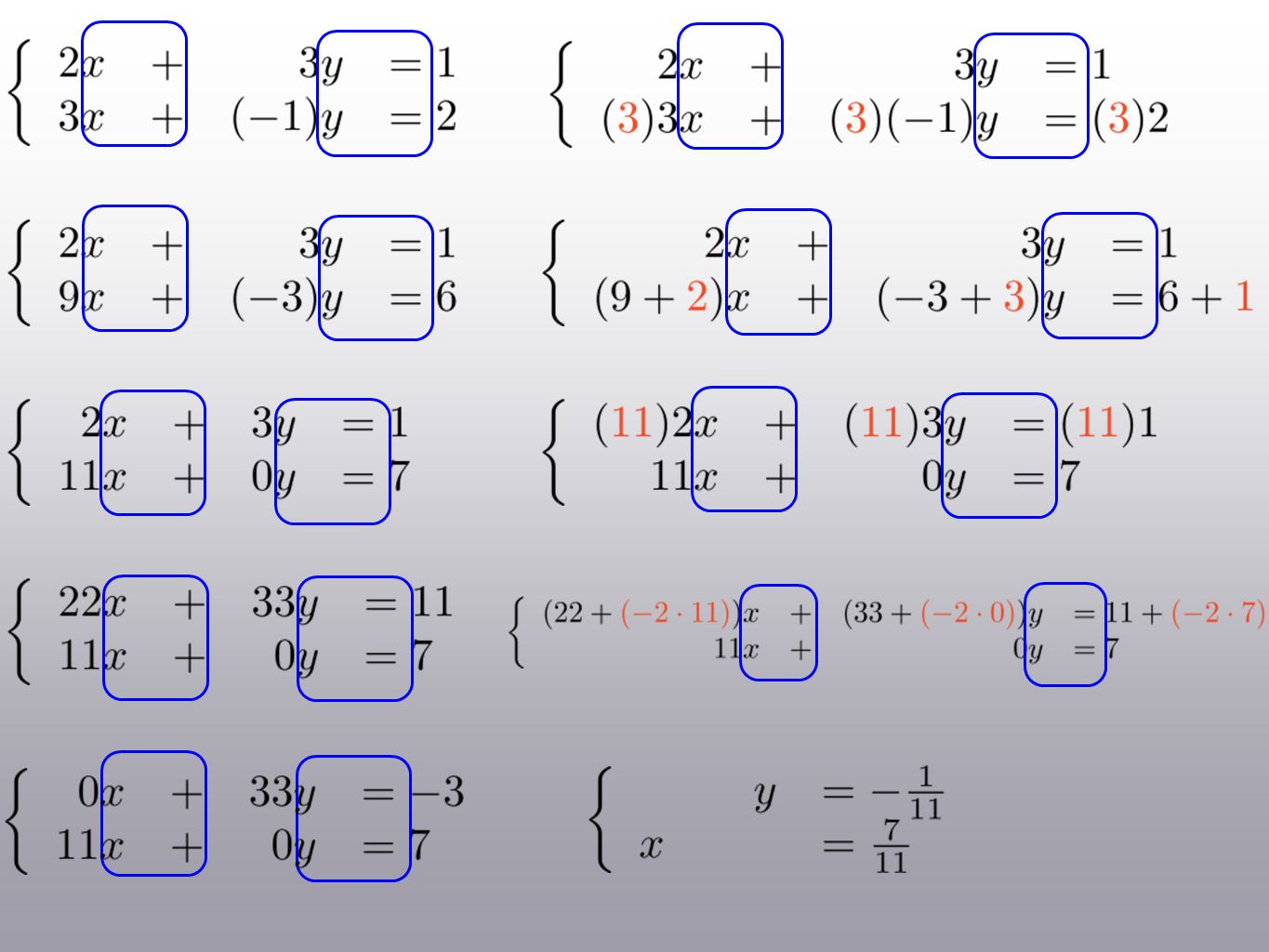
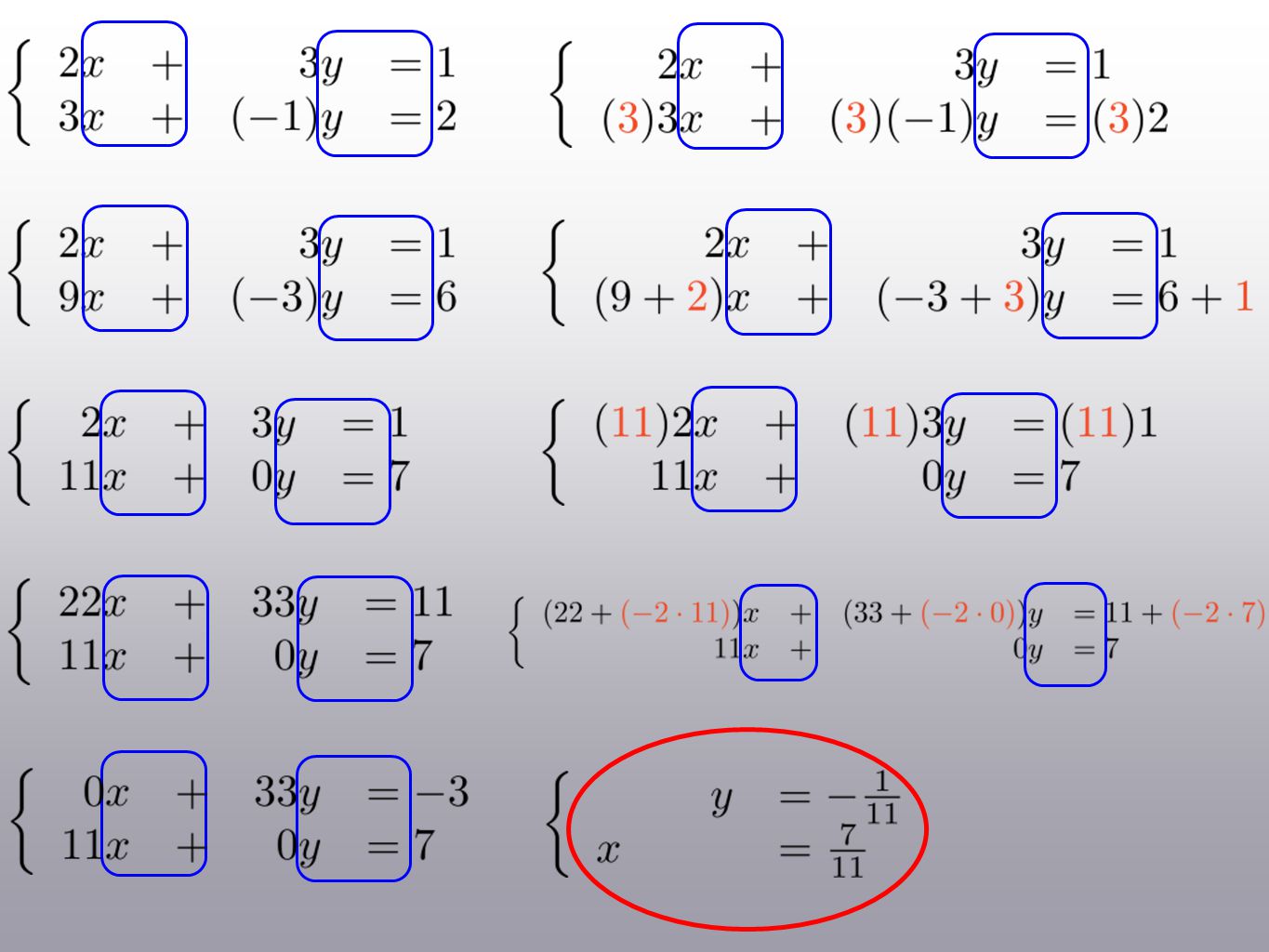
Pour comprendre la méthode, regardons ce quon peut faire à un système déquations sans changer lensemble solution. 1. Interchanger deux équations 2. Multiplier une équation par une constante

10
3. Additionner à une équation un multiple dune autre.

12
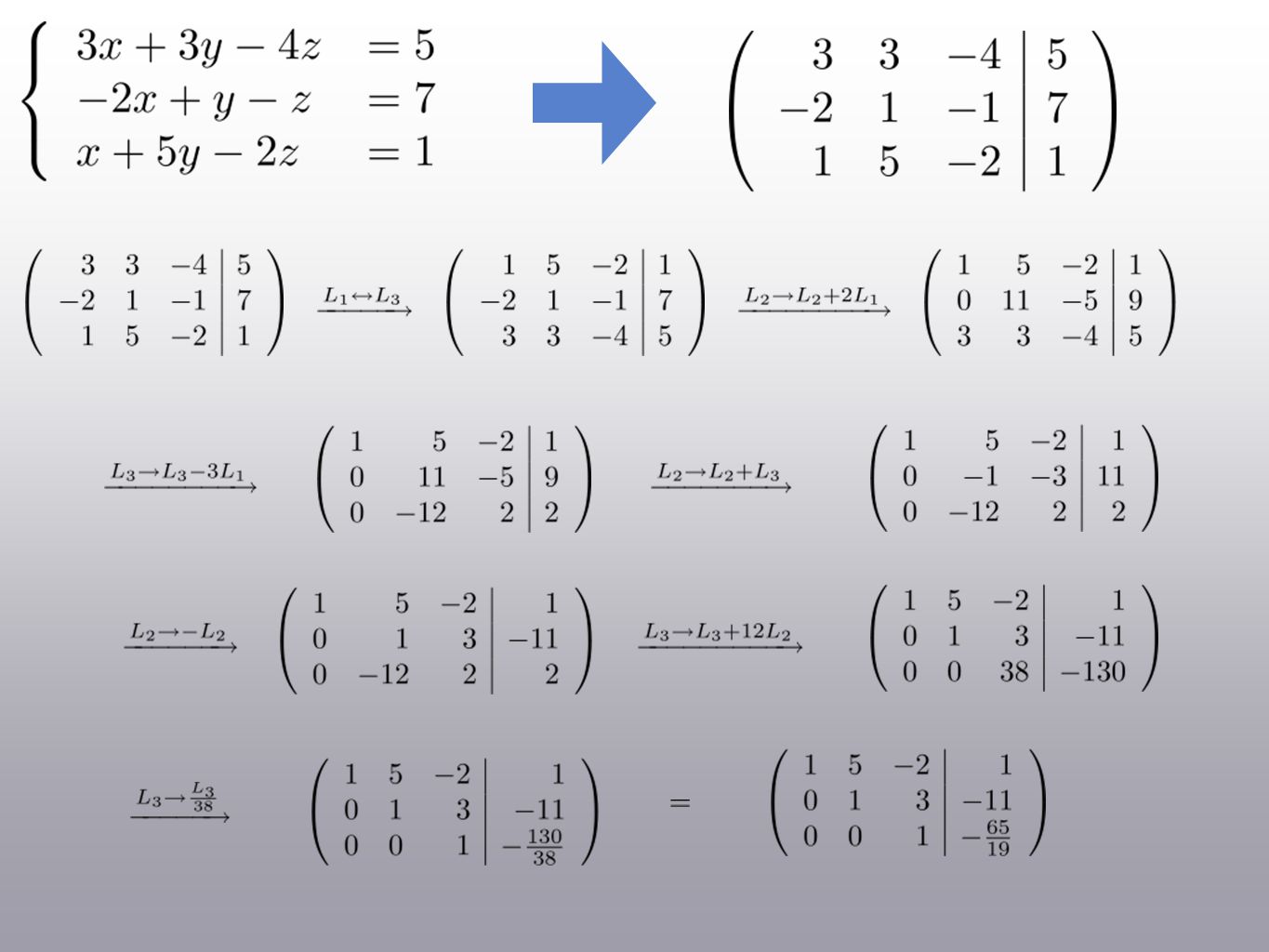
Matrice des coefficients Matrice augmentée

14
Matrice des coefficients Matrice augmenté ( ***** ) Li-»Lj
 Li-»Lj")
17
Pour quelles valeurs de x et de y léquation 0 = 8 est-t-elle vérifiée? Donc le système déquations linéaires nas pas de solution. Aucune!!!

18
La deuxième équation est toujours vrai donc inutile. Donc les points de cette droite; forment lensemble solution du système déquation.

19
Interprétation géométrique Deux droites dans le plan. Une solution de ce système est un point de lintersection de ces deux droites. Il y a une solution unique Il ny a pas de solution Il y a une infinité de solutions Deux droites sécantes Deux droites parallèles distinctes Deux droites parallèles confondues

20
Il y a une solution unique Il ny a pas de solution Il y a une infinité de solution Trois plans dans lespace.

21
On fait quoi avec ça?

22
Il y a donc une infinité de solutions. Il suffit de poser une des variables égale à un paramètre. Prenons par exemple Ou, si on préfère, lintersection de ces deux plans est la droite: doù

23
Eventuellement, vous serez tenté de faire plus dune opération ligne à la fois. Généralement il ny a pas de problème à faire ça, mais vous ne devez pas faire une opération ligne sur une ligne que vous venez de changer.

24
Exemple: Donc il y une infinité de solutions, mais... Il ny en a quune!

25
Définition: Un système déquations linéaires est dit homogène si toutes les constantes sont nuls. Les systèmes déquations linéaires homogènes ont toujours au moins une solution. Remarque:

26
Définition: Une matrice est dite échelonée réduite ligne (ERL) si Ex: Le premier coefficient non nul dune ligne est un 1 (on nomme ce coefficient le pivot). 1. Tous les coefficients de la colonne du pivot sont nuls. 3. Le pivot dune ligne est toujours à droite des pivots des lignes au dessus. 2.

27
Définition: En dautre terme, toutes matrices est l-équivalente à une unique matrice ERL. Sietavecet des matrices ERL, alors Deux matrices, et sont dites ligne- équivalente (l-équivalente) si peut sobtenir de par une suites dopérations lignes. On écrit alors; Proposition:
 si peut sobtenir de par une suites dopérations lignes. On écrit alors; Proposition:.")
28
Définition: Soit une matrice et sa matrice ERL l-équivalente. Le rang de, noté est le nombre de lignes non nulles de. Exemple:

29
Aujourdhui, nous avons vu Les systèmes déquations linéaires Les trois opérations ligne. Système déquations linéaires homogène. Matrices ERL.

30
Devoir: p.172 # 1 à 14

Présentations similaires






PRESENTATION avec x, y, z les inconnues.>")
, de constantes (0, 1), d’opérations (+, ), de relations (=, ) Axiomes : ce sont.>")












