Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
© Jerome Boccond-Gibod, Flickr
Panoramas, etcetera © Jerome Boccond-Gibod, Flickr GIF-4105/7105 Photographie Algorithmique Jean-François Lalonde Merci à A. Efros, R. Szeliski, S. Seitz!

2
Retour sur les TPs!

3
TP1: meilleur projet Razieh Toony!
4
TP1 mention honorable: Tom Toulouse

5
TP2: meilleur projet Tom Toulouse!
6
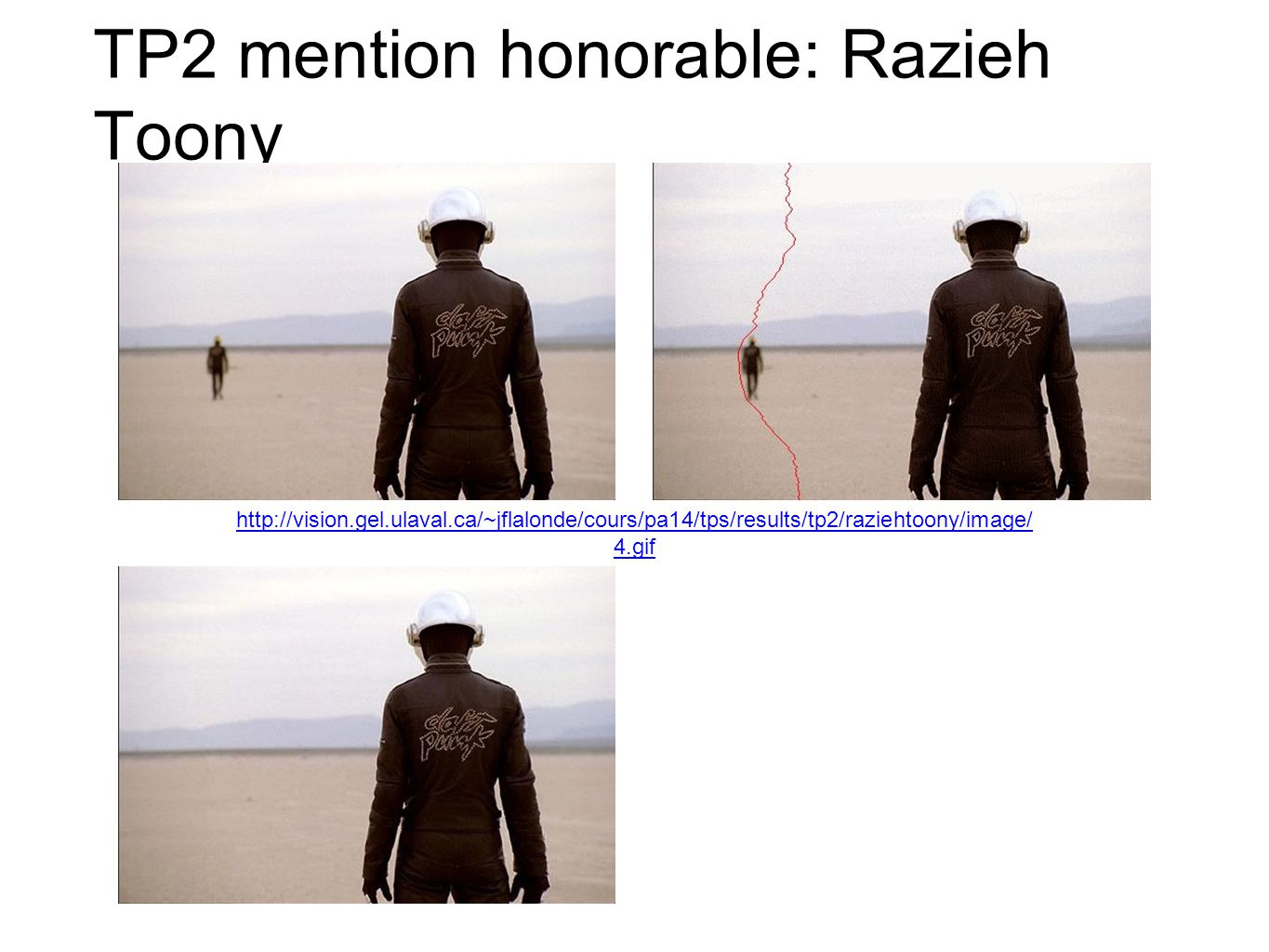
TP2 mention honorable: Razieh Toony
7
TP2 mention honorable: Razieh Toony

8
TP3: meilleur projet Ming Hou!

9
TP3 mention honorable: Jingwei Cao
Avec triangulation: Sans triangulation:

10
Homographies Transformation entre deux caméras ayant le même centre de projection transformation entre deux plans (quadrilatères) on perd le parallélisme mais les droites sont préservées PP2 PP1

11
Homographies Pour appliquer une homographie H
Calculer p’ = Hp (en coordonnées homogènes) Convertir p’ en coordonnées dans l’image PP1
 Convertir p’ en coordonnées dans l’image. PP1.")
12
Mosaïques de rotation Si on sait que notre centre de projection reste le même est-ce qu’on peut contraindre H?

13
3D → 2D Projection de perspective
(Xc,Yc,Zc) f K
 f. K.")
14
Rotation 3D Projeter de l’image vers le point 3D
(x0,y0,z0) = (u0-uc,v0-vc,f) Appliquer la rotation (x1,y1,z1) = R01 (x0,y0,z0) Reprojeter dans la nouvelle image (u1,v1) = (fx1/z1+uc,fy1/z1+vc) Alors Notre homographie a alors : 3 DDL si la distance focale est connue 4 si elle est la même (et inconnue) 5 si elles sont différentes (x,y,z) (u,v,f) R (x,y,z) f (u,v,f)
 = (u0-uc,v0-vc,f) Appliquer la rotation. (x1,y1,z1) = R01 (x0,y0,z0) Reprojeter dans la nouvelle image. (u1,v1) = (fx1/z1+uc,fy1/z1+vc) Alors. Notre homographie a alors : 3 DDL si la distance focale est connue. 4 si elle est la même (et inconnue) 5 si elles sont différentes. (x,y,z) (u,v,f) R. (x,y,z) f. (u,v,f)")
15
Pairwise alignment Given two sets of matching points, compute R
Procrustes Algorithm [Golub & VanLoan] Given two sets of matching points, compute R pi’ = R pi with 3D rays pi = N(xi,yi,zi) = N(ui-uc,vi-vc,f) A = Σi pi pi’T = Σi pi piT RT = U S VT = (U S UT) RT VT = UT RT R = V UT
 = N(ui-uc,vi-vc,f) A = Σi pi pi’T = Σi pi piT RT = U S VT = (U S UT) RT. VT = UT RT. R = V UT.")
16
Rotation autour de l’axe vertical
Si notre caméra est sur un trépied Quelle est la structure de H?

17
Projection sur un plan? plan virtuel

18
Cylindre de projection!
Panoramas complets Comment générer des panoramas 360°? Cylindre de projection!

19
Projection cylindrique
Projeter point 3D (X,Y,Z) sur le cylindre X Y Z cylindre déroulé Convertir en coordonnées cylindriques image cylindrique Convertir en coordonnées image (cylindre) cylindre unitaire
 sur le cylindre. X. Y. Z. cylindre déroulé. Convertir en coordonnées cylindriques. image cylindrique. Convertir en coordonnées image (cylindre) cylindre unitaire.")
20
Projection cylindrique
X

21
Projection cylindrique inverse
X Y Z (X,Y,Z) (sinθ,h,cosθ)
 (sinθ,h,cosθ)")
22
Panoramas cylindriques
Étapes (si l’on connaît les rotations) Reprojeter les images sur un cylindre Composer les images
 Reprojeter les images sur un cylindre. Composer les images.")
23
Panoramas cylindriques
Si l’on ne connaît pas la matrice de rotation? Il faut la trouver… Rotation de la caméra = translation du cylindre!

24
Créer le panorama Aligner les paires ensemble, composer, et rogner

25
Problème: dérive Erreur verticale Erreur horizontale
calculer la correction de telle sorte que la somme = 0 Erreur horizontale ré-utiliser la première (ou dernière) image
 image.")
26
Re-projection cylindrique
Le secret est dans la … distance focale Image 384x300 vue de haut Therefore, it is desirable if the global motion model we need to recover is translation, which has only two parameters. It turns out that for a pure panning motion, if we convert two images to their cylindrical maps with known focal length, the relationship between them can be represented by a translation. Here is an example of how cylindrical maps are constructed with differently with f’s. Note how straight lines are curved. Similarly, we can map an image to its longitude/latitude spherical coordinates as well if f is given. f = 180 (pixels) f = 280 f = 380
 f = 280. f = 380.")
27
Panorama 360°

28
Notre amie la focale La distance focale dépend de la caméra:
On peut l’estimer: à partir du champ de vue de l’information dans l’EXIF (peut être imprécis) en essayant plusieurs valeurs et garder celle qui aligne le panorama en utilisant un objet 3D dont on connaît les dimensions Etc. Il y a d’autres paramètres! Centre optique, ratio des pixels, distorsions, etc.
 en essayant plusieurs valeurs et garder celle qui aligne le panorama. en utilisant un objet 3D dont on connaît les dimensions. Etc. Il y a d’autres paramètres! Centre optique, ratio des pixels, distorsions, etc.")
29
Distorsion radiale straight lines curve around the image center

30
Distorsion radiale Causée par lentilles imparfaites
Pas de distorsion “Pin cushion” “Barrel” Causée par lentilles imparfaites Encore une fois, plus important en bordure de l’image

31
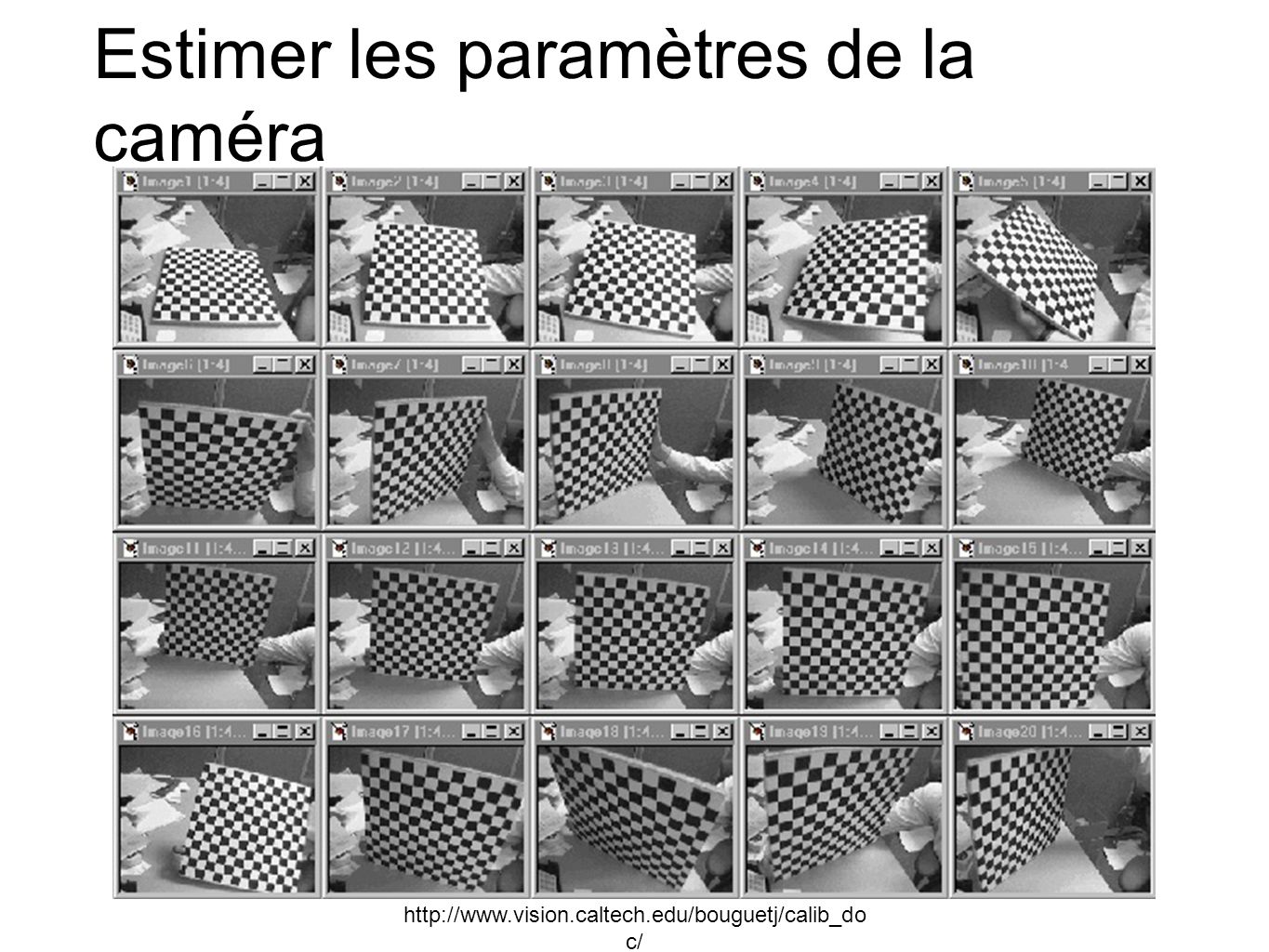
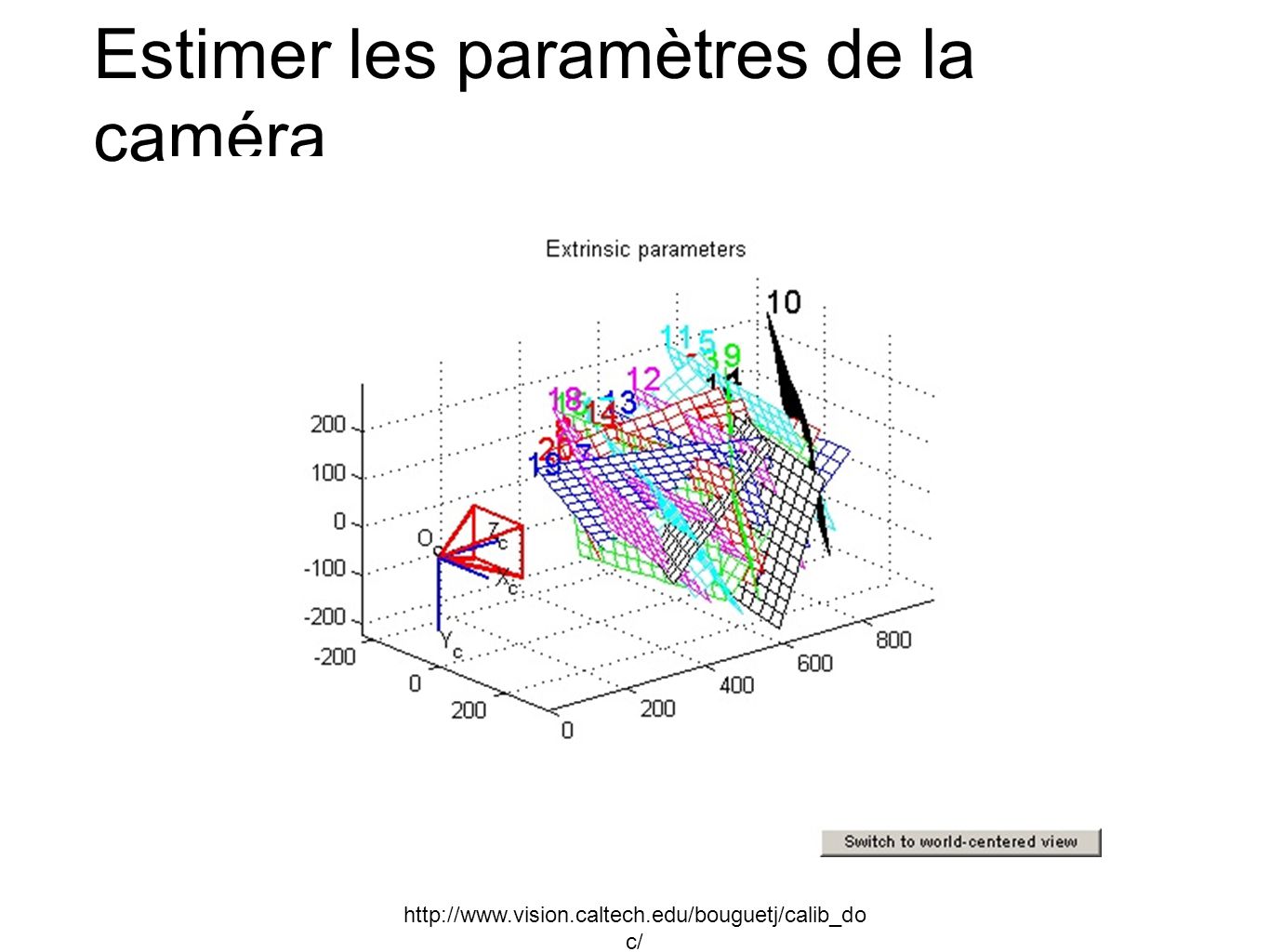
Estimer les paramètres de la caméra?
Intrinsèques Extrinsèques Déterminer les paramètres de la caméra à partir d’objets 3D connus

32
Calculer matrice de projection
Placer un objet connu devant la caméra déterminer correspondances entre points 3D et dans la caméra calculer la transformation entre la scène et l’image

33
Calibrage linéaire Résoudre en minimisant la somme des différences au carré (comme dans le TP) Avantages: Une seule matrice! Désavantages: On ne connaît pas la valeur des paramètres indépendamment Mélange paramètres intrinsèques et extrinsèques dépend de la pose: si on déplace la caméra, ça ne fonctionne plus!

34
Estimer les paramètres de la caméra
35
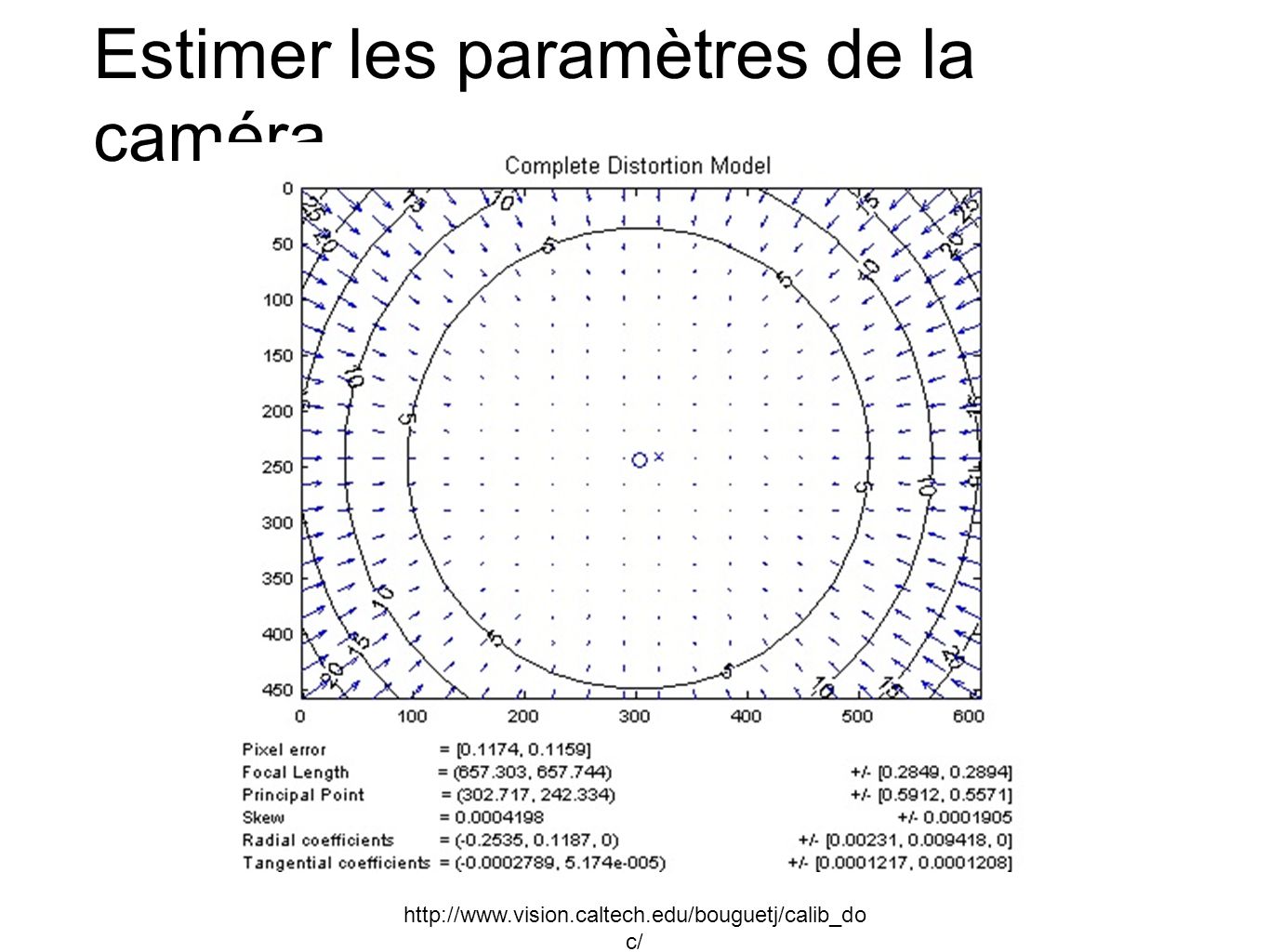
Estimer les paramètres de la caméra
36
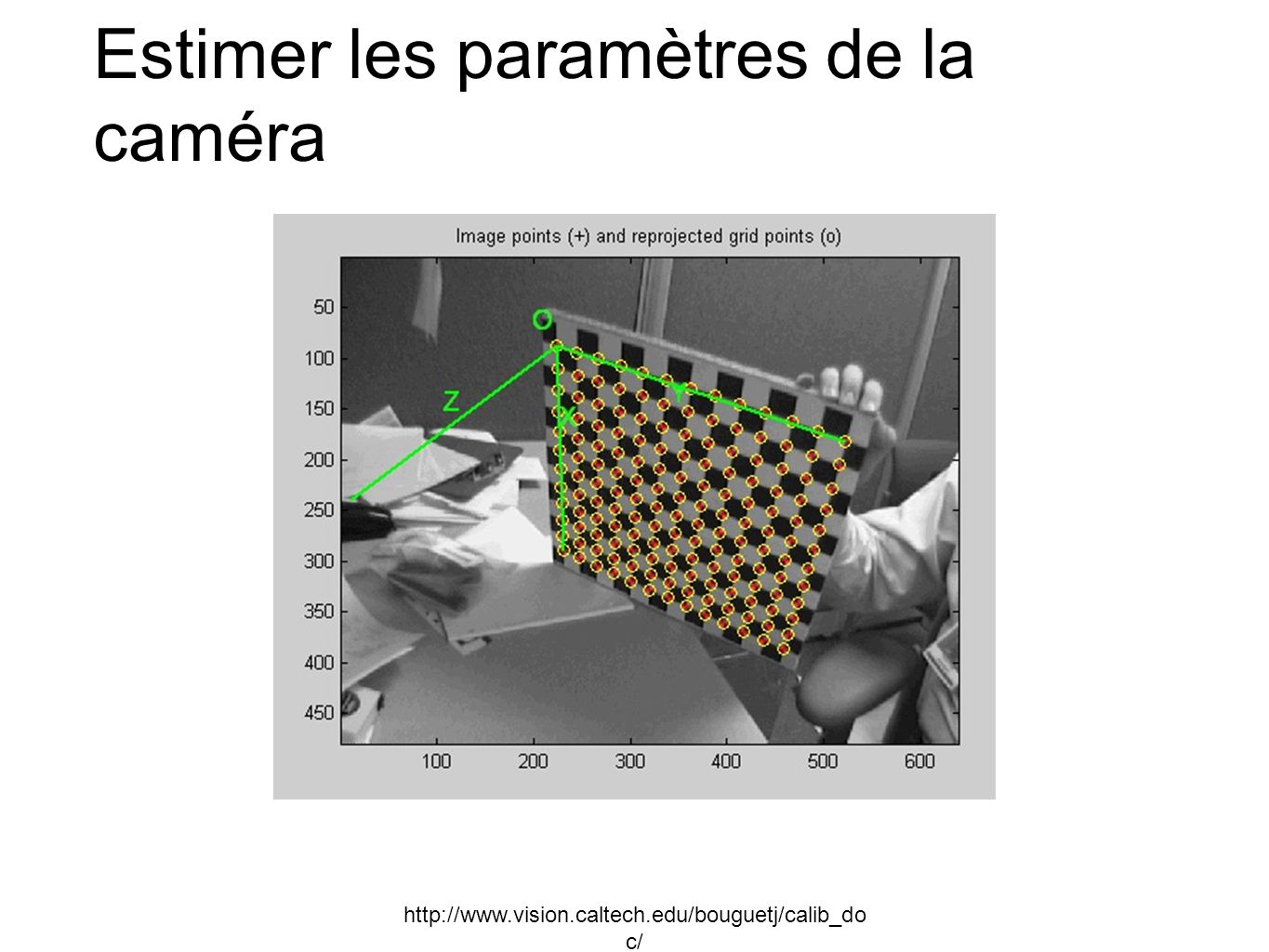
Estimer les paramètres de la caméra
37
Estimer les paramètres de la caméra
38
Projection sphérique Projeter point 3D (X,Y,Z) sur la sphère
Convertir en coordonnées sphériques image sphérique Convertir en coordonnées images φ sphère déroulée

39
Projection sphérique Y X

40
Projection sphérique inverse
φ (x,y,z) cos φ sin φ (sinθcosφ,cosθcosφ,sinφ) Y Z cos θ cos φ X
 cos φ. sin φ. (sinθcosφ,cosθcosφ,sinφ) Y. Z. cos θ cos φ. X.")
41
3D rotation Rotate image before placing on unrolled sphere φ cos φ
(x,y,z) X Y Z cos φ (sinθcosφ,cosθcosφ,sinφ) sin φ cos θ cos φ p = R p _ _ _ _
 X. Y. Z. cos φ. (sinθcosφ,cosθcosφ,sinφ) sin φ. cos θ cos φ. p = R p. _ _. _ _.")
42
Panorama complet + + + +

43
Autres projections

44
Autres projections

45
Demo! Hugin

46
Exemple: Reconnaître des panoramas
M. Brown et D. Lowe, University of British Columbia

47
Pourquoi? Rotations 1D (θ) Ordre des images = l’ordre des rotations
 Ordre des images = l’ordre des rotations")
48
Pourquoi? Rotations 1D (θ) Ordre des images = l’ordre des rotations
 Ordre des images = l’ordre des rotations")
49
Pourquoi? Rotations 1D (θ) Rotations 2D (θ)
Ordre des images = l’ordre des rotations Rotations 2D (θ) Ordre des images ≠ l’ordre des rotations
 Ordre des images ≠ l’ordre des rotations.")
50
Pourquoi? Rotations 1D (θ) Rotations 2D (θ)
Ordre des images = l’ordre des rotations Rotations 2D (θ) Ordre des images ≠ l’ordre des rotations
 Ordre des images ≠ l’ordre des rotations.")
51
Pourquoi? Rotations 1D (θ) Rotations 2D (θ)
Ordre des images = l’ordre des rotations Rotations 2D (θ) Ordre des images ≠ l’ordre des rotations
 Ordre des images ≠ l’ordre des rotations.")
52
But

53
Calculer l’homographie avec RANSAC

54
Calculer l’homographie avec RANSAC

55
Calculer l’homographie avec RANSAC

56
Modèle probabiliste pour vérification

57
Trouver les panoramas

58
Trouver les panoramas

59
Trouver les panoramas

60
Trouver les panoramas

61
Résultats

62
Planification TP4: dû dimanche soir, 23h59 TP5: disponible mercredi
Mercredi: plage dynamique en préparation pour le TP5…

Présentations similaires



















