Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Traitement d’images : concepts fondamentaux
Introduction à la morphologie mathématique (cas binaire) : Erosion, dilatation, ouverture et fermeture binaires, Reconstruction géodésique, étiquetage en composantes connexes, Squelette. Introduction à la classification : cas pixelique, algorithme des k-moyennes
 : Erosion, dilatation, ouverture et fermeture binaires, Reconstruction géodésique, étiquetage en composantes connexes, Squelette. Introduction à la classification : cas pixelique, algorithme des k-moyennes.")
2
Bibliographie H. Maître, Le traitement des images, Hermès éditions.
J.-P. Cocquerez & S. Philipp, Analyse d’images : filtrage et segmentation, Masson éditions. S. Bres, J.-M. Jolion & F. Lebourgeois, Traitement et analyse des images numériques, Hermès éditions.

3
Pavage et maillage Pavage = partition de l’espace continu en cellules élémentaires Cas de pavages plan réguliers : cellules identiques et régulières Maillage = ensemble des segments reliant les ‘centroïdes’ des cellules ayant une arête commune Dualité pavage et maillage

4
Notion de voisinage élémentaire
Image discrète = graphe Connexité trame carrée trame hexagonale chemin sur le graphe = succession de nœuds du graphe joints par des arcs chemin 4-connexe : chemin 8-connexe :

5
Notion d’ « entourage » Théorème de Jordan : toute courbe simple fermée sépare l’espace en 2 composantes : l’intérieur et l’extérieur de la courbe. Cas de la trame carrée : tout chemin 4-connexe (resp. 8-connexe) simple fermé (Ai=Aj i=j et Ai voisin de Aj |i-j|=1[n]) sépare l’espace en 2 composantes 8-connexes (resp. 4-connexes) Nombre d’Euler = différence entre le # composantes connexes et le # de trous. Soit : s=#singletons, a=#couples ligne ou colonne, d=#couples diagonaux, t=#trinômes, q=#quadrinômes, alors en 4-connexité E=s-a+q en 8-connexité E=s-a-d+t-q
 simple fermé (Ai=Aj i=j et Ai voisin de Aj |i-j|=1[n]) sépare l’espace en 2 composantes 8-connexes (resp. 4-connexes) Nombre d’Euler = différence entre le # composantes connexes et le # de trous. Soit : s=#singletons, a=#couples ligne ou colonne, d=#couples diagonaux, t=#trinômes, q=#quadrinômes, alors en 4-connexité E=s-a+q. en 8-connexité E=s-a-d+t-q.")
6
Exemple : nombre d’Euler
Cas 4-connexe : # composantes 4-connexes = 3 # de trous (8-connexes) = 1 E4=2 Cas 8-connexe : # composantes 8-connexes = 1 # de trous (4-connexes) = 2 E8=-1 s=16, a=14, d=13, t=10, q=0 En 4-connexité E4=s-a+q=2 En 8-connexité E8=s-a-d+t-q=-1
 = 1. E4=2. Cas 8-connexe : # composantes 8-connexes = 1. # de trous (4-connexes) = 2. E8=-1. s=16, a=14, d=13, t=10, q=0. En 4-connexité E4=s-a+q=2. En 8-connexité E8=s-a-d+t-q=-1.")
7
Distances discrètes (I)
Distance à 1 objet minimum des distances euclidiennes (approximées) aux points de l’objet Propagation de distances locales Distances définies à partir d’un ensemble de vecteurs de déplacement Utilisation de masques Exemple : 1 1 1 0 1 1 1 1 4 3 4 3 0 3 11 11 5 0 5 1
 aux points de l’objet. Propagation de distances locales. Distances définies à partir d’un ensemble de vecteurs de déplacement. Utilisation de masques. Exemple :")
8
Distances discrètes (II)
Partition du masque en 2 sous-masques g1 et g2 causaux ULLR et LRUL Algorithme de calcul séquentiel 1) Poser 2) f0 image / points de l’objet 0 et les autres + 3) pour k=1,2 si k=1, balayer l’image dans le sens UL LR si k=2, balayer l’image dans le sens LR UL 4) image des distances f2 4 3 4 3 0 3
 Poser. 2) f0 image / points de l’objet 0 et les autres + 3) pour k=1,2. si k=1, balayer l’image dans le sens UL LR. si k=2, balayer l’image dans le sens LR UL. 4) image des distances f")
9
Distances discrètes : exemple
∞ ∞ 1 2 3 4 5 4 3 2 1 5

10
Distances géodésiques
Intérêt des métriques géodésiques : tient compte des obstacles ( dist. euclidienne ou versions digitales). distance géodésique : étant donnés 2 points a et b d’un compact X, toujours un plus court chemin de a à b qui soit X; la longueur de ce chemin est dX(a,b). Propriétés : dX est une distance généralisée, i.e. a b d c
. distance géodésique : étant donnés 2 points a et b d’un compact X, toujours un plus court chemin de a à b qui soit X; la longueur de ce chemin est dX(a,b). Propriétés : dX est une distance généralisée, i.e. a. b. d. c.")
11
Pavage de Voronoï Ensemble de germes {P1, P2, …, Pn}
V(Pi)={PR2 / j[1,n], d(P,Pi)d(P,Pj)} Propriétés : tout sommet de Voronoï est le centre d’un cercle (de Delaunay) passant par 3 germes et ne contenant aucun autre germe ; V(Pi) non borné ssi Pi la frontière de l’enveloppe convexe des Pj Triangulation de Delaunay Algorithmes sous optimaux : insérer les points un par un Applications, e.g. : enveloppe convexe de points, distance de 2 ensembles de points Cas discret : distance discrète
={PR2 / j[1,n], d(P,Pi)d(P,Pj)} Propriétés : tout sommet de Voronoï est le centre d’un cercle (de Delaunay) passant par 3 germes et ne contenant aucun autre germe ; V(Pi) non borné ssi Pi la frontière de l’enveloppe convexe des Pj. Triangulation de Delaunay. Algorithmes sous optimaux : insérer les points un par un. Applications, e.g. : enveloppe convexe de points, distance de 2 ensembles de points. Cas discret : distance discrète.")
12
Morphologie mathématique
Traitement non linéaire de l’information Analyse morphologique : extraction des informations à partir de tests Exemples de problèmes : Repose sur la théorie des ensembles, des treillis complets, … – s’applique aux ensembles, aux fonctions, … Comment éliminer le bruit ? Comment séparer 2 composantes ? Comment étiqueter différemment 2 formes connexes ? Comment comparer 2 formes ?

13
Définition: 1 treillis est 1 ensemble ordonné (E,) tel que toute partie de E admette 1 borne supérieure et 1 borne inférieure : réflexive (xE, xx), antisymétrique ((x,y)E2, xy et yx x=y), transitive ((x,y,z)E3, xy et yz xz ) Exemple de treillis: plus petit des majorants plus grand des minorants ensembliste éléments parties de S relation d’ordre inclusion borne supérieure union borne inférieure intersection involution complémentaire
, antisymétrique ((x,y)E2, xy et yx x=y), transitive ((x,y,z)E3, xy et yz xz ) Exemple de treillis: plus petit des majorants. plus grand des minorants. ensembliste. éléments. parties de S. relation d’ordre. inclusion. borne supérieure. union. borne inférieure. intersection. involution. complémentaire.")
14
Opérateurs de MM : fondements mathématiques
principes fondamentaux Compatibilité avec les translations Compatibilité avec les homothéties Localité Semi-continuité propriétés Croissance Extensivité / anti-extensivité Idempotence Dualité Indépendance par rapport à l’origine de l’espace: t, y(f+t)=y(f)+t Indépendance par rapport au paramètre d’échelle: l, y(lf)=ly(f) E’ borné, E borné / y(f)E’=y(fE)E’ A,B AB y(A) y(B) Extensivité: A, Ay(A) y(y(.))=y(.) y et f duales :
=y(f)+t. Indépendance par rapport au paramètre d’échelle: l, y(lf)=ly(f) E’ borné, E borné / y(f)E’=y(fE)E’ A,B AB y(A) y(B) Extensivité: A, Ay(A) y(y(.))=y(.) y et f duales :")
15
Erosion / dilatation : définitions (1)
Élément structurant B relations de l’objet X avec l’élément (taille, forme données) Addition de Minkowski : lieu géométr. des points de Bx (translaté de B en x) lorsque x décrit X propriétés : commutative, associative, croissante, élément neutre Soustraction de Minkowski : Intersection des translatés de X par chaque point de B propriétés : non commutative, associative, croissante, élément neutre Ө
 Addition de Minkowski : lieu géométr. des points de Bx (translaté de B en x) lorsque x décrit X. propriétés : commutative, associative, croissante, élément neutre. Soustraction de Minkowski : Intersection des translatés de X par chaque point de B. propriétés : non commutative, associative, croissante, élément neutre. Ө.")
16
Erosion / dilatation : définitions (2)
Dilatation (binaire) : lieu géométr. des points x tels que Bx intersecte X Erosion (binaire) : lieu géométr. des points x tels que Bx soit inclus X
 : lieu géométr. des points x tels que Bx intersecte X. Erosion (binaire) : lieu géométr. des points x tels que Bx soit inclus X.")
17
Erosion / dilatation : propriétés (1)
Croissance par rapport à X En effet : Extensivité / anti-extensivité (si centre de B inclus dans B) Croissance / décroissance par rapport à B
 Croissance / décroissance par rapport à B.")
18
Erosion / dilatation : propriétés (2)
Commutations démonstration : cf exercices Adjonction en effet :

19
Erosion / dilatation : algorithmes (1)
Cas général (binaire) : En chaque pixel z de l’image examiner la relation entre l’élément struct. Bz et l’objet X Dilatation: pour i[1,#lignes] // boucle sur les lignes pour j[1,#colonnes] { // boucle sur les colonnes initializer z à 0 pour i’[iBmin,iBmax] // origine de tB en 0 tB inclus dans [iBmin,iBmax] [jBmin,jBmax] pour j’[jBmin,jBmax] si (z nul et ima(i+i’,j+j’) non nul et tB(i’,j’) non nul) alors z 1 ima_dilate(i,j) z } Erosion: initializer z à 1 si (z non nul et ima(i+i’,j+j’) nul et tB(i’,j’) non nul) alors z 0 ima_erode(i,j) z
 : En chaque pixel z de l’image examiner la relation entre l’élément struct. Bz et l’objet X. Dilatation: pour i[1,#lignes] // boucle sur les lignes. pour j[1,#colonnes] { // boucle sur les colonnes. initializer z à 0. pour i’[iBmin,iBmax] // origine de tB en 0 tB inclus dans [iBmin,iBmax] [jBmin,jBmax] pour j’[jBmin,jBmax] si (z nul et ima(i+i’,j+j’) non nul et tB(i’,j’) non nul) alors z 1. ima_dilate(i,j) z. } Erosion: initializer z à 1. si (z non nul et ima(i+i’,j+j’) nul et tB(i’,j’) non nul) alors z 0. ima_erode(i,j) z.")
20
Erosion / dilatation : algorithmes (2)
Exploitation de l’associativité de la dilatation / érosion Cas d’un élément B qui est le résultat de l’addition de Minkovski de et avec B1 (B à la taille élémentaire) : Itérer la dilatation (érosion) par B1 Cas d’un élément convexe : Dilatations (érosions) successives par 2 segments Cas d’un élément structurant ‘boule’ : Seuillage de la transformée en distance de l’image binaire ou de son complémentaire
 : Itérer la dilatation (érosion) par B1. Cas d’un élément convexe : Dilatations (érosions) successives par 2 segments. Cas d’un élément structurant ‘boule’ : Seuillage de la transformée en distance de l’image binaire ou de son complémentaire.")
21
Dilatation binaire : exemples
dB4(X) , B4: dB2(X), B2: dB2(dB2(X)) dB2(dB2(dB2(X))) dB0(X), B0: dB0(dB0(X)) dB0(dB0(dB0(X))) dB1(dB0(dB0(dB0(X)))), B1: dB1(dB1(dB0 (dB0(dB0(X))))) dB1(dB1(dB1(dB0 (dB0(dB0(X)))))) Dist1 4 3 4 3 0 3 11 11 5 0 5 Dist1 Dist1,5 Dist1,5 Dist2 Dist2 Dist2,5 Dist2,5
 , B4: dB2(X), B2: dB2(dB2(X)) dB2(dB2(dB2(X))) dB0(X), B0: dB0(dB0(X)) dB0(dB0(dB0(X))) dB1(dB0(dB0(dB0(X)))), B1: dB1(dB1(dB0 (dB0(dB0(X))))) dB1(dB1(dB1(dB0 (dB0(dB0(X)))))) Dist Dist1. Dist1,5. Dist1,5. Dist2. Dist2. Dist2,5. Dist2,5.")
22
Érosion binaire : exemples
eB4(X) , B4: eB2(X), B2: eB2(eB2(X)) eB2(eB2(eB2(X))) eB0(X), B0: eB0(eB0(X)) eB0(eB0(eB0(X))) eB1(eB0(eB0(eB0(X)))), B1: eB1(eB1(eB0 (eB0(eB0(X))))) eB1(eB1(eB1(eB0 (eB0(eB0(X)))))) Dist1 Dist1,5 4 3 4 3 0 3 11 11 5 0 5 Dist2 Dist2,5
 , B4: eB2(X), B2: eB2(eB2(X)) eB2(eB2(eB2(X))) eB0(X), B0: eB0(eB0(X)) eB0(eB0(eB0(X))) eB1(eB0(eB0(eB0(X)))), B1: eB1(eB1(eB0 (eB0(eB0(X))))) eB1(eB1(eB1(eB0 (eB0(eB0(X)))))) Dist1. Dist1, Dist2. Dist2,5.")
23
Ouverture / fermeture : cas binaire
Propriétés Croissance / X trivial car eB et dB / X Extensivité / anti-extensivité même si centre de l’élément structurant B à B démonstration : cf. exercices (Dé)croissance / B
croissance / B.")
24
Ouverture / fermeture : propriétés
Idempotence Min-max : L’ouverture de X est le plus petit X’ de même érodé que X La fermeture de X est le plus grand X’ de même dilaté que X

25
Dilatation / Erosion géodésique binaire
Boules géodésiques Quand l , les boules géodésiques progressent comme le front d’une onde émise depuis z dans le milieu X Dilatation géodésique de taille l de Y dans X (YBl)X Erosion géodésique X eX(Y1) Y1 Y2 e(Y2)X
X. Erosion géodésique. X. eX(Y1) Y1. Y2. e(Y2)X.")
26
Reconstruction géodésique binaire
Application : extraction de composantes connexes à partir de marqueurs Principe : à partir d’un point de la composante, on reconstruit toute la composante Méthode : dilatation géodésique dans X

27
Reconstruction géodésique : algorithme (cas binaire)
Éviter de réitérer dilatation jusqu’au diamètre des plus grandes composantes connexes Cas efficace : utilisation d’une pile des pixels de l’image à traiter : Exemple : Itération contenu de la pile Initialisation de la pile avec les pixels de XY Tant qu’il reste des éléments dans la pile : Extraire un élément (pixel) de la pile Le traiter labelisation de la composante connexe dans l’image résultat Calcul de ses voisins (dilatation par B) Ajout dans la pile (si nécessaire) des voisins situés dans X 1 (2,1) 2 (1,1) (3,1) 3 (3,1) (1,2) 4 (1,2) (3,2) (4,1) 5 (3,2) (4,1) (1,3) 6 (4,1) (1,3) (3,3) 7 (1,3) (3,3) (5,1) 8 (3,3) (5,1) (2,3) 9 (5,1) (2,3) (4,3) 10 (2,3) (4,3) (5,2) 11 (4,3) (5,2) (5,2) (5,3) (5,3)
 de la pile. Le traiter. labelisation de la composante connexe dans l’image résultat. Calcul de ses voisins (dilatation par B) Ajout dans la pile (si nécessaire) des voisins situés dans X. 1 (2,1) 2 (1,1) (3,1) 3 (3,1) (1,2) 4 (1,2) (3,2) (4,1) 5 (3,2) (4,1) (1,3) 6 (4,1) (1,3) (3,3) 7 (1,3) (3,3) (5,1) 8 (3,3) (5,1) (2,3) 9 (5,1) (2,3) (4,3) 10 (2,3) (4,3) (5,2) 11 (4,3) (5,2) 12 (5,2) (5,3) 13 (5,3)")
28
Exemples d’application (1)
Reconstruction géodésique à partir de Y X Algorithme : k=0; Pour chaque pixel s de X : si xs et !zs : - calcul de EBX({s}) - k++ - t EBX({s}), zt=k # composantes connexes = k Etiquettage de composantes connexes
 - k++ - t EBX({s}), zt=k. # composantes connexes = k. Etiquettage de composantes connexes.")
29
Exemples d’application (2)
Filtrage par Erosion-Reconstruction (ne modifie pas les contours des objets restants Erosion-Dilatation) Erosion de X puis reconstruction de eB(X) dans X Suppression d’objets touchant le bord de l’image Différence entre X et la reconstruction du bord dans X - =
 Erosion de X puis reconstruction de eB(X) dans X. Suppression d’objets touchant le bord de l’image. Différence entre X et la reconstruction du bord dans X. - =")
30
Exemples d’application (3)
Bouchage de trous Complément de la reconstruction dans Xc d’un ensemble qui n’intersecte pas X Seuillage avec hystérésis Reconstruction des points au-dessus du seuil haut dans l’ensemble des points au-dessus du seuil bas.

31
Erodé ultime : définition / algorithme
Cas général (binaire) Ensemble des composantes connexes de X disparaissant à l’itération suivante lors d’une séquence d’érosion par un élément structurant élémentaire B1 Pour chaque pixel (non traité) disparaissant à l’itération t, calculer la composante connexe à t-1 et tester si tous les pixels ont effectivement disparus à t. Cas d’un élément structurant disque Ensemble des maxima régionaux de la fonction distance de X à son complémentaire Algorithme : Calcul de l’image des distances Calculer l’ensemble des maxima locaux Pour chaque maximum local (xsxt, tVs) non déjà traité : Reconstitution géodésique de la composante connexe à xs conditionnellement à l’image des valeurs supérieures à xs CC(xs) Si xtCC(xs): xt>xs, alors marquer comme traités les maxima locaux qui appartiennent à CC(xs) Sinon, alors xs est un maximum régional et CC(xs) érodé ultime
 Ensemble des composantes connexes de X disparaissant à l’itération suivante lors d’une séquence d’érosion par un élément structurant élémentaire B1. Pour chaque pixel (non traité) disparaissant à l’itération t, calculer la composante connexe à t-1 et tester si tous les pixels ont effectivement disparus à t. Cas d’un élément structurant disque. Ensemble des maxima régionaux de la fonction distance de X à son complémentaire. Algorithme : Calcul de l’image des distances. Calculer l’ensemble des maxima locaux. Pour chaque maximum local (xsxt, tVs) non déjà traité : Reconstitution géodésique de la composante connexe à xs conditionnellement à l’image des valeurs supérieures à xs CC(xs) Si xtCC(xs): xt>xs, alors marquer comme traités les maxima locaux qui appartiennent à CC(xs) Sinon, alors xs est un maximum régional et CC(xs) érodé ultime.")
32
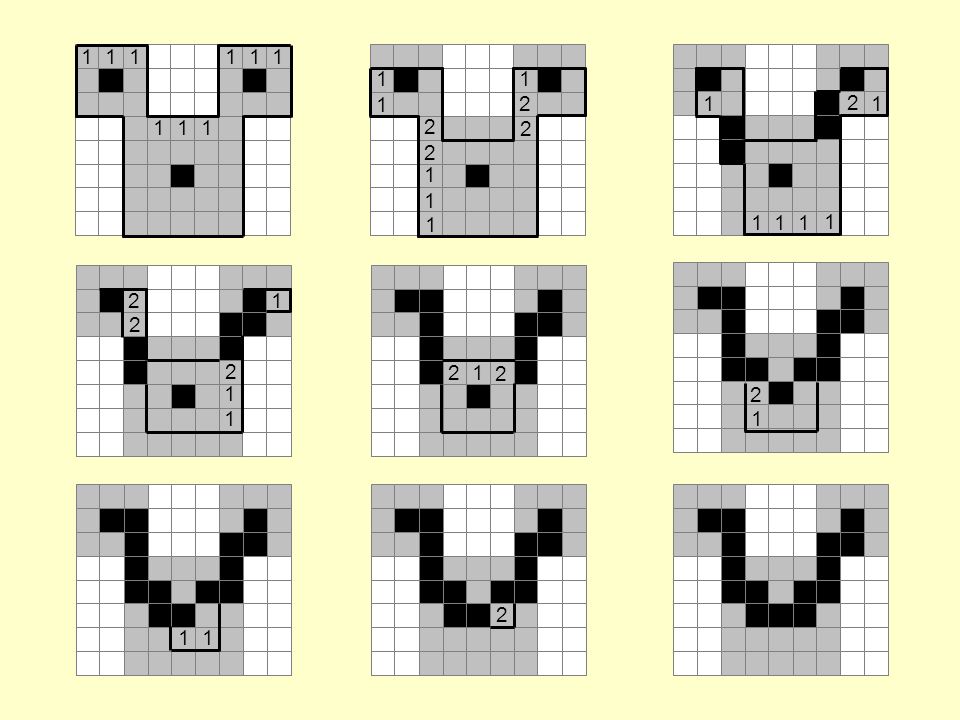
Erodé ultime : exemple Distance 4-connexité
Distances 8-connexité, respectivement masque (1,0), (4,3,0) et (11,7,5,0) Érosions successives par B
, (4,3,0) et (11,7,5,0) Érosions successives par. B.")
33
Squelette morphologique : définition
Exemples de propriétés souhaitées : Préservation de la géométrie, de la topologie Invariance aux translations, rotations, homothéties Réversibilité, continuité, épaisseur nulle Squelette morphologique euclidien (cas continu) U des centres des boules maximales (contenues ds X) Cas discret : U des résidus d’ouverture des érodés successifs : Pb : ne préserve pas la topologie Même forme, respect des parties allongées, etc… Mêmes nombres de composantes connexes, de trous. La forme peut être retrouvée connaissant le squelette et la taille des érosions (p.e.). Une ‘petite’ variation de forme engendre une petite variation du squelette. Épaisseur nulle, réversible Mais : ne préserve pas la topologie, ex : mais non continu, ex :
 U des centres des boules maximales (contenues ds X) Cas discret : U des résidus d’ouverture des érodés successifs : Pb : ne préserve pas la topologie. Même forme, respect des parties allongées, etc… Mêmes nombres de composantes connexes, de trous. La forme peut être retrouvée connaissant le squelette et la taille des érosions (p.e.). Une ‘petite’ variation de forme engendre une petite variation du squelette. Épaisseur nulle, réversible. Mais : ne préserve pas la topologie, ex : mais. non continu, ex :")
34
Homotopie discrète et simplicité
Définition : F fct de R2 R2 préserve la topologie si A ouvert, A et F(A) sont homotopes Cas discret : A’ K-homotope à A 2 bijections préservant la relation d’entourage (au sens du théorème de Jordan) entre : (i) les ensembles des K-cc (K{4,8}) de A et de A’, (ii) les ensembles des K’-cc (K’=12-K) de Ac et de (A’)c pour A’A (i) toute K-cc (K{4,8}) de A contient exactement 1 K-cc de A’ et (ii) toute K’-cc (K’=12-K) de (A’)c contient exactement 1 K’-cc de Ac Définition : x point K-simple dans X X-{x} homotope à X x a au moins 1 K’-voisin dans Xc et x est K-voisin d’1 seule K-cc de X se calcule en examinant les 8 voisins
 sont homotopes. Cas discret : A’ K-homotope à A 2 bijections préservant la relation d’entourage (au sens du théorème de Jordan) entre : (i) les ensembles des K-cc (K{4,8}) de A et de A’, (ii) les ensembles des K’-cc (K’=12-K) de Ac et de (A’)c. pour A’A. (i) toute K-cc (K{4,8}) de A contient exactement 1 K-cc de A’ et. (ii) toute K’-cc (K’=12-K) de (A’)c contient exactement 1 K’-cc de Ac. Définition : x point K-simple dans X X-{x} homotope à X x a au moins 1 K’-voisin dans Xc et x est K-voisin d’1 seule K-cc de X se calcule en examinant les 8 voisins.")
35
Homotopie discrète et simplicité
Propriété : x est K-simple NKX(x)=1 Retrait des points K-simples : séquentiel perte des propriétés métriques, parallèle risque de perte de l’homotopie solution : ‘¼ parallèle’ : on ne retire ensemble que les points qui ont 1 voisin ‘Nord’ (resp. ‘Est’, ‘Sud’, ‘Ouest’) dans Xc Rq : noyau homotopique ne préserve pas la forme de X utilisation de ‘points d’ancrage’ x3 x1 x2 x4 x0,x8 x x5 x7 x6 Une réunion de points K-simples n’est pas nécessairement un ensemble simple, ex : x et y sont 8-simples mais pas {x,y} x y
=1. Retrait des points K-simples : séquentiel perte des propriétés métriques, parallèle risque de perte de l’homotopie. solution : ‘¼ parallèle’ : on ne retire ensemble que les points qui ont 1 voisin ‘Nord’ (resp. ‘Est’, ‘Sud’, ‘Ouest’) dans Xc. Rq : noyau homotopique ne préserve pas la forme de X utilisation de ‘points d’ancrage’ x3. x1. x2. x4. x0,x8. x. x5. x7. x6. Une réunion de points K-simples n’est pas nécessairement un ensemble simple, ex : x et y sont 8-simples. mais pas {x,y} x. y.")
36
Caractérisation géométrique des points K-simples
Définition : transformation ‘tout ou rien’ teste l’appartenance de certains voisins à X ET de certains autres à Xc Définition : amincissement (resp. épaississement) de X enlever (resp. ajouter) des points de X sélectionnés par 1 transformation en tout ou rien. Propriété : 1 amincissement (épaississement) est homotopique si l’inversion de couleur du point central ne modifie pas la topologie. Ex préserve topo Exemples d’élément structurant : Lskel Mskel Ebardage
 de X enlever (resp. ajouter) des points de X sélectionnés par 1 transformation en tout ou rien. Propriété : 1 amincissement (épaississement) est homotopique si l’inversion de couleur du point central ne modifie pas la topologie. Ex. préserve topo. Exemples d’élément structurant : Lskel Mskel Ebardage.")
37
Squelette morphologique : algorithme
Rq : noyau homotopique ne préserve pas la forme de X utilisation de ‘points d’ancrage’ , e.g. maxima locaux de la distance Algorithme préservant la topologie : Initialiser S(X) à X Répéter (jusqu’à avoir traité tous les points de X) : Soit ESd les points de S(X) ayant un voisin immédiat dans (S(X))c dans la direction ‘Nord’ (resp. ‘Est’, ‘Sud’, ‘Ouest’) Déterminer LK-s l’ensemble (parmi les points de ESd) des points ‘K-simples’ (en K connexité) Retirer simultanément de S(X) tous les points de LK-s (sauf points d’ancrage) Changer la direction considérée (N, E, S, ou O) Informatiquement, utilisation de ‘piles’ de pixels
 à X. Répéter (jusqu’à avoir traité tous les points de X) : Soit ESd les points de S(X) ayant un voisin immédiat dans (S(X))c dans la direction ‘Nord’ (resp. ‘Est’, ‘Sud’, ‘Ouest’) Déterminer LK-s l’ensemble (parmi les points de ESd) des points ‘K-simples’ (en K connexité) Retirer simultanément de S(X) tous les points de LK-s (sauf points d’ancrage) Changer la direction considérée (N, E, S, ou O) Informatiquement, utilisation de ‘piles’ de pixels.")
38
1 1 2 1 2 1 2 2 1 1 2 2 1
39
Exemple : X 4-connexité Itérations 0, 1, 2 Itérations 3, 4, 5

40
Squelette par zones d’influence (SKIZ)
Définition : Soit X compact de R2, la zone d’influence d’une composante connexe Xi de X est l’ens. des points plus près de Xi que de tout autre composante Le SKIZ est la frontière des zones d’influence Calcul du SKIZ : 1. Amincissement du fond par Lskel 2. Puis ébardage du résultat de 1. Ex :

41
Exercices (I) Proposer une ou plusieurs solutions pour les problèmes cités en introduction : Comment éliminer le bruit ? Comment séparer ces 2 composantes ? Comment comparer 2 formes ? Comment étiqueter différemment 2 formes connexes ?

42
Exercices (II) Démontrer les propriétés de commutation des opérateurs dilatation et érosion binaires. (Utiliser les définitions de ces opérateurs) Démontrer les propriétés de croissance / décroissance et extensivité / anti-extensivité des opérateurs ouverture et fermeture binaires. (Utiliser les propriétés des opérateurs dilatation et érosion, notamment l’adjonction pour démontrer l’extensivité / anti-extensivité)
 Démontrer les propriétés de croissance / décroissance et extensivité / anti-extensivité des opérateurs ouverture et fermeture binaires. (Utiliser les propriétés des opérateurs dilatation et érosion, notamment l’adjonction pour démontrer l’extensivité / anti-extensivité)")
43
Exercices (II) : correction
Commutation des opérateurs dilatation et érosion. Propriétés des ouvertures / fermetures binaires Croissance / X : trivial car eB et dB / X Extensivité / anti-extensivité propriété d’adjonction car car (Dé)croissance / B
croissance / B.")
44
Exercices (III) Soit l’image suivante :
On cherche on cherche à compter les différents types de cellules et leur proportions respectives. Proposez une solution, décrivez le synoptique de l’algorithme à mettre en œuvre et les fonctions à développer (notamment les entrées / sorties), puis pour chacune d’elles le pseudo-code.
, puis pour chacune d’elles le pseudo-code.")
45
Exercices (III) : correction
Image niveaux de gris Image binaire Image binaire filtrée Éliminer les objets touchant le bord Seuillage Image segmentée des particules Détection des différentes particules Image binaire filtrée Éliminer le bruit (petites particules) Image des squelettes des particules Squelette Détermination des paramètres pour chaque particule Liste des objets avec caractérist. Liste des objets avec étiquettes Classification
 Image des squelettes des particules. Squelette. Détermination des paramètres pour chaque particule. Liste des objets avec caractérist. Liste des objets avec étiquettes. Classification.")
46
Classification : objectifs
Mettre en évidence les similarités/ dissimilarités entre les ‘objets’ (e.g. pixels) Obtenir une représentation simplifiée (mais pertinente) des données originales Mettre sous un même label les objets ou pixels similaires Définitions préalables Passer de l’espace des caractéristiques à celui des classes → règle : supervisée / non supervisée, paramétrique / non paramétrique, probabiliste / syntaxique / autre, avec rejet / sans rejet Espace des caractéristiques d (sS, ysd) Espace de décision = ensemble des classes W (sS, xsW), W = {wi, i[1,c] } Règle de décision ( = d(ys) ) Critère de performance numériques ou syntaxiques
 Obtenir une représentation simplifiée (mais pertinente) des données originales. Mettre sous un même label les objets ou pixels similaires. Définitions préalables. Passer de l’espace des caractéristiques à celui des classes → règle : supervisée / non supervisée, paramétrique / non paramétrique, probabiliste / syntaxique / autre, avec rejet / sans rejet. Espace des caractéristiques d (sS, ysd) Espace de décision = ensemble des classes W (sS, xsW), W = {wi, i[1,c] } Règle de décision ( = d(ys) ) Critère de performance. numériques ou syntaxiques.")
47
Ex. de classification non paramétrique
Classification k-ppv (plus proches voisins) On dispose d’un ensemble (de ‘référence’) d’objets déjà labelisés Pour chaque objet y à classifier, on estime ses k ppv selon la métrique de l’espace des caractéristiques, et on lui affecte le label majoritaire parmi ses k ppv Possibilité d’introduire un rejet (soit en distance, soit en ambiguïté) Très sensible à l’ensemble de référence Exemples : Euclidienne, Mahanolobis… Possibilité de modélisation de loi complexes, de forme non nécessairement paramétrique (ex. en 2D disque et couronne) 1-ppv 3-ppv 5-ppv k-ppv (/24)
 On dispose d’un ensemble (de ‘référence’) d’objets déjà labelisés. Pour chaque objet y à classifier, on estime ses k ppv selon la métrique de l’espace des caractéristiques, et on lui affecte le label majoritaire parmi ses k ppv. Possibilité d’introduire un rejet (soit en distance, soit en ambiguïté) Très sensible à l’ensemble de référence. Exemples : Euclidienne, Mahanolobis… Possibilité de modélisation de loi complexes, de forme non nécessairement paramétrique (ex. en 2D disque et couronne) 1-ppv. 3-ppv. 5-ppv. k-ppv (/24)")
48
Connaissance des caractéristiques des classes
Cas supervisé Connaissance a priori des caractéristiques des classes Apprentissage à partir d’objets déjà étiquetés (cas de données ‘complètes’) Cas non supervisé Définition d’un critère, ex. : - minimisation de la probabilité d’erreur - minimisation de l’inertie intra-classe maximisation de l’inertie inter-classes Définition d’un algorithme d’optimisation
 Cas non supervisé. Définition d’un critère, ex. : - minimisation de la probabilité d’erreur. - minimisation de l’inertie intra-classe maximisation de l’inertie inter-classes. Définition d’un algorithme d’optimisation.")
49
Equivalence minimisation de la dispersion intra-classe / maximisation de la dispersion inter-classes

50
Algorithme des c-moyennes (cas non sup.)
Initialisation (itération t=0) : choix des centres initiaux (e.g. aléatoirement, répartis, échantillonnés) Répéter jusqu’à vérification du critère d’arrêt : t++ Labelisation des objets par la plus proche classe Mise à jour des centres par minimisation de l’erreur quadratique : Estimation du critère d’arrêt (e.g. test sur #ch(t) ) c=2 c=3 c=4 Remarques : # de classes a priori Dépendance à l’initialisation c=5
 : choix des centres initiaux (e.g. aléatoirement, répartis, échantillonnés) Répéter jusqu’à vérification du critère d’arrêt : t++ Labelisation des objets par la plus proche classe. Mise à jour des centres par minimisation de l’erreur quadratique : Estimation du critère d’arrêt (e.g. test sur #ch(t) ) c=2. c=3. c=4. Remarques : # de classes a priori. Dépendance à l’initialisation. c=5.")
51
Variantes K-moyennes ISODATA Nuées dynamiques
Regroupement ou division de classes nouveaux paramètres : qN=#min objets par classe, qS seuil de division (division de la classe i si : maxj[1,d]sij > qS et #objets de la classe > 2qN+1 et Iintra(i) > Iintra), qC seuil de regroupement (regroupement des classes i et j si : dist(mi, mj)qC), #max itérations Nuées dynamiques Remplacement de la mesure de ‘distance’ par une mesure de ‘dissemblance’ dis(ys,wi) minimiser classe i représentée par son ‘noyau’, e.g. centre ( K-moyennes), plusieurs ‘échantillons’ de référence zl l[1,p] (dis(.,.) = moyenne des distances de l’objet aux zl)
 > Iintra), qC seuil de regroupement (regroupement des classes i et j si : dist(mi, mj)qC), #max itérations. Nuées dynamiques. Remplacement de la mesure de ‘distance’ par une mesure de ‘dissemblance’ dis(ys,wi) minimiser. classe i représentée par son ‘noyau’, e.g. centre ( K-moyennes), plusieurs ‘échantillons’ de référence zl l[1,p] (dis(.,.) = moyenne des distances de l’objet aux zl)")
52
Probabilités et mesure de l’information
Probabilités fréquencistes / subjectivistes Physique stat. : répétition de phénomènes dans des ‘longues’ séquences probabilité = passage à la limite d’une fréquence ≠ Modèle de connaissance a priori : degré de confiance relatif à un état de connaissance probabilité = traduction numérique d’un état de connaissance Remarque : Quantité d’information et probabilités I = -log2(pi) I ≥ 0, information d’autant plus importante que évènement inattendu (de faible probabilité)
 I ≥ 0, information d’autant plus importante que évènement inattendu (de faible probabilité)")
53
Théorie bayésienne de la décision
La théorie de la décision bayésienne repose sur la minimisation du ‘risque’ Soit Ct(x,x’) le coût associé à la décision de x’ alors que la réalisation de X était x La performance de l’estimateur x’ est mesurée par le risque de Bayes E[Ct(x,x’)] = Coût marginal (conditionnel à y) à minimiser Or x’P(x’/y)=1 et x’, P(x’/y)≥0, La règle qui minimise le coût moyen est donc celle telle que P(x’/y)=1 si et seulement si xP(x/y)Ct(x,x’)=1 P(x’/x,y)=P(x’/y) car décision selon y seul
 le coût associé à la décision de x’ alors que la réalisation de X était x. La performance de l’estimateur x’ est mesurée par le risque de Bayes E[Ct(x,x’)] = Coût marginal (conditionnel à y) à minimiser. Or x’P(x’/y)=1 et x’, P(x’/y)≥0, La règle qui minimise le coût moyen est donc celle telle que P(x’/y)=1 si et seulement si xP(x/y)Ct(x,x’)=1. P(x’/x,y)=P(x’/y) car décision selon y seul.")
54
Exemple Détection d’un véhicule dangereux (V)
Décider V si et seulement si Cas où a>b, on va décider plus facilement V que V en raison du coût plus fort d’une décision erronée en faveur de V que de V

55
Critère du Maximum A Posteriori
Ct(x,x’) = 0, si x = x’ = 1, si x x’
 = 0, si x = x’ = 1, si x x’")
56
Cas d’un mélange de lois normales
Exemples

57
Estimation de seuils (cas supervisé)
Image = ensemble d’échantillons suivant une loi de distribution de paramètres déterminés par la classe ex. : distribution gaussienne Cas 1D (monocanal), si seuil de séparation des classes wi et wi+1, probabilité d’erreur associée : Maximum de vraisemblance :
, si seuil de séparation des classes wi et wi+1, probabilité d’erreur associée : Maximum de vraisemblance :")
58
Maximum de vraisemblance (suite) :
Maximum A Posteriori :

59
Lien c-moyennes / théorie bayésienne
Maximum de vraisemblance sur des lois de paramètres qi (e.g. qi=(mi,Si)) inconnus : Cas d’échantillons indépendants : max. de la logvraisemblance d’où : (*) or : d’où (*) Cas gaussien, Si connus, mi inconnus résolution itérative K-moyennes : Si=Id i[1,c] et P(wi | ys,q) = 1 si wi = xs, = 0 sinon en effet : en effet : d’où :
) inconnus : Cas d’échantillons indépendants : max. de la logvraisemblance. d’où : (*) or : d’où (*) Cas gaussien, Si connus, mi inconnus résolution itérative. K-moyennes : Si=Id i[1,c] et P(wi | ys,q) = 1 si wi = xs, = 0 sinon. en effet : en effet : d’où :")
60
Exercices (I) Soit l’image à deux canaux suivante :
Soit les pixels de référence suivants : label 1 : valeurs (1,03;2,19) (0,94;1,83) (0,59;2,04) label 2 : valeurs (2,08;0,89) (2,23;1,16) (1,96;1,14) Effectuer la classification au k-ppv. Commentez l’introduction d’un nouveau pixel de référence de label 1 et de valeurs (1,32;1,56) 2,48 1,68 2,24 2,55 2,36 1,64 2,20 1,42 1,96 2,43 1,95 1,61 2,23 1,55 2,50 1,57 1,65 1,92 2,34 1,41 2,45 1,50 2,28 2,53 2,11 2,08 2,27 1,63 1,32 0,80 1,20 0,59 0,94 1,36 1,59 1,03 1,14 1,26 1,04 0,83 1,10 1,09 0,64 1,52 0,40 0,55 1,30 1,33 0,95 0,50 1,13 0,70 0,76 1,16 0,56 1,60 1,06 1,33 0,67 0,55 1,32 0,80 1,42 1,44 1,23 0,51 0,95 0,81 1,04 1,03 1,16 0,43 0,45 1,35 0,91 1,21 1,55 1,53 0,60 1,18 0,83 0,89 0,58 1,14 1,47 1,06 1,56 1,52 1,78 2,04 1,79 2,50 1,72 1,83 2,19 2,14 1,76 2,49 1,46 1,41 1,80 2,31 1,68 2,54 1,62 2,44 2,41 2,40 2,56 2,48 2,35 2,28 1,95 1,51 2,24 2,53 1,50
 (0,94;1,83) (0,59;2,04) label 2 : valeurs (2,08;0,89) (2,23;1,16) (1,96;1,14) Effectuer la classification au k-ppv. Commentez l’introduction d’un nouveau pixel de référence de label 1 et de valeurs (1,32;1,56) 2,48. 1,68. 2,24. 2,55. 2,36. 1,64. 2,20. 1,42. 1,96. 2,43. 1,95. 1,61. 2,23. 1,55. 2,50. 1,57. 1,65. 1,92. 2,34. 1,41. 2,45. 1,50. 2,28. 2,53. 2,11. 2,08. 2,27. 1,63. 1,32. 0,80. 1,20. 0,59. 0,94. 1,36. 1,59. 1,03. 1,14. 1,26. 1,04. 0,83. 1,10. 1,09. 0,64. 1,52. 0,40. 0,55. 1,30. 1,33. 0,95. 0,50. 1,13. 0,70. 0,76. 1,16. 0,56. 1,60. 1,06. 1,33. 0,67. 0,55. 1,32. 0,80. 1,42. 1,44. 1,23. 0,51. 0,95. 0,81. 1,04. 1,03. 1,16. 0,43. 0,45. 1,35. 0,91. 1,21. 1,55. 1,53. 0,60. 1,18. 0,83. 0,89. 0,58. 1,14. 1,47. 1,06. 1,56. 1,52. 1,78. 2,04. 1,79. 2,50. 1,72. 1,83. 2,19. 2,14. 1,76. 2,49. 1,46. 1,41. 1,80. 2,31. 1,68. 2,54. 1,62. 2,44. 2,41. 2,40. 2,56. 2,48. 2,35. 2,28. 1,95. 1,51. 2,24. 2,53. 1,50.")
61
Exercices (I) : correction
 : correction")
62
Classification : exercices (II)
Sur l’image à deux canaux précédente : Déterminer les seuils de décision pour chacun des canaux si l’on suppose 2 classes gaussiennes de caractéristiques respectives : canal 1 : (m1,s1)=(2.0,0.38), (m2,s2)=(1.0,0.34) canal 2 : (m1,s1)=(1.0,0.36), (m2,s2)=(2.0,0.39) Effectuer la classification par seuillage. Effectuer la classification c-means pour c=2. Comparer avec les résultats précédents. Comparer avec la classification c-means pour c=3.
=(2.0,0.38), (m2,s2)=(1.0,0.34) canal 2 : (m1,s1)=(1.0,0.36), (m2,s2)=(2.0,0.39) Effectuer la classification par seuillage. Effectuer la classification c-means pour c=2. Comparer avec les résultats précédents. Comparer avec la classification c-means pour c=3.")
63
Exercices (II) : correction
 : correction")
Présentations similaires




















