Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Chapitre VIII Transmission de puissance

3
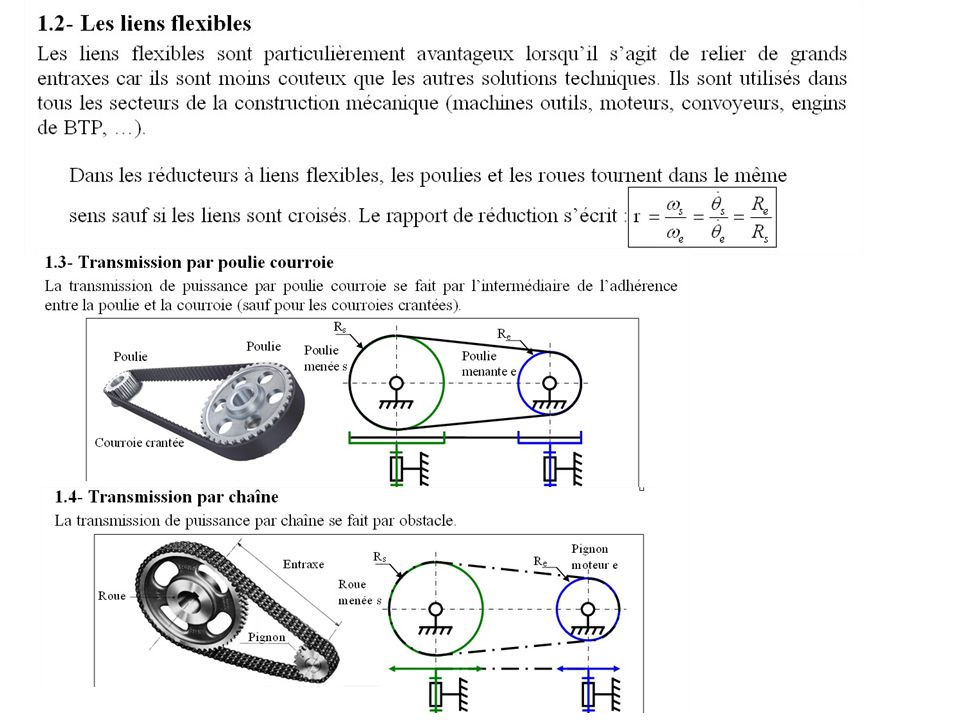
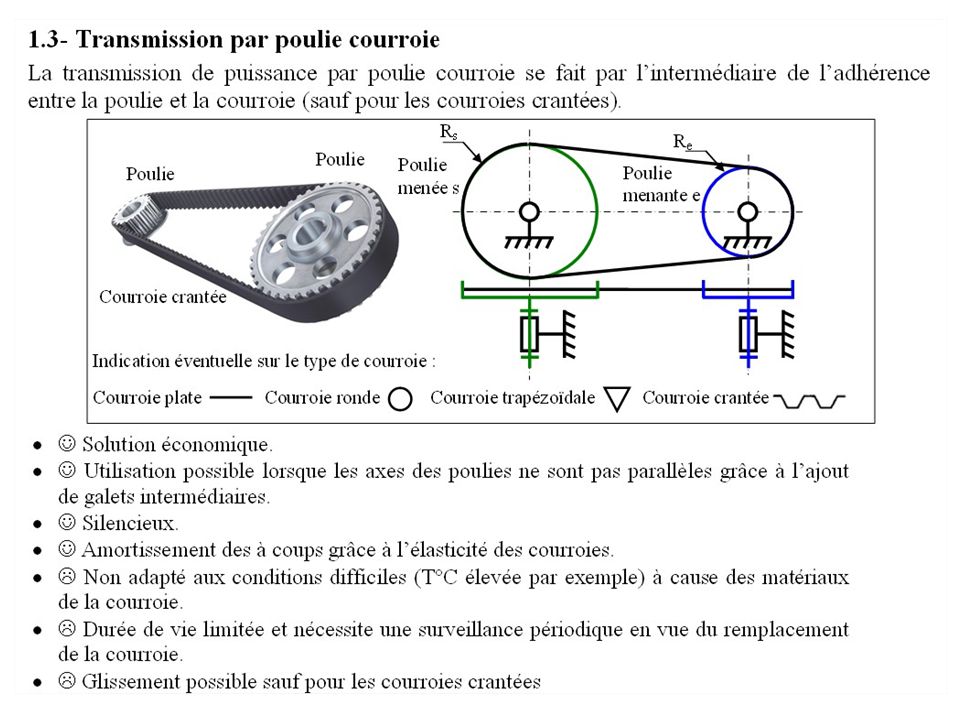
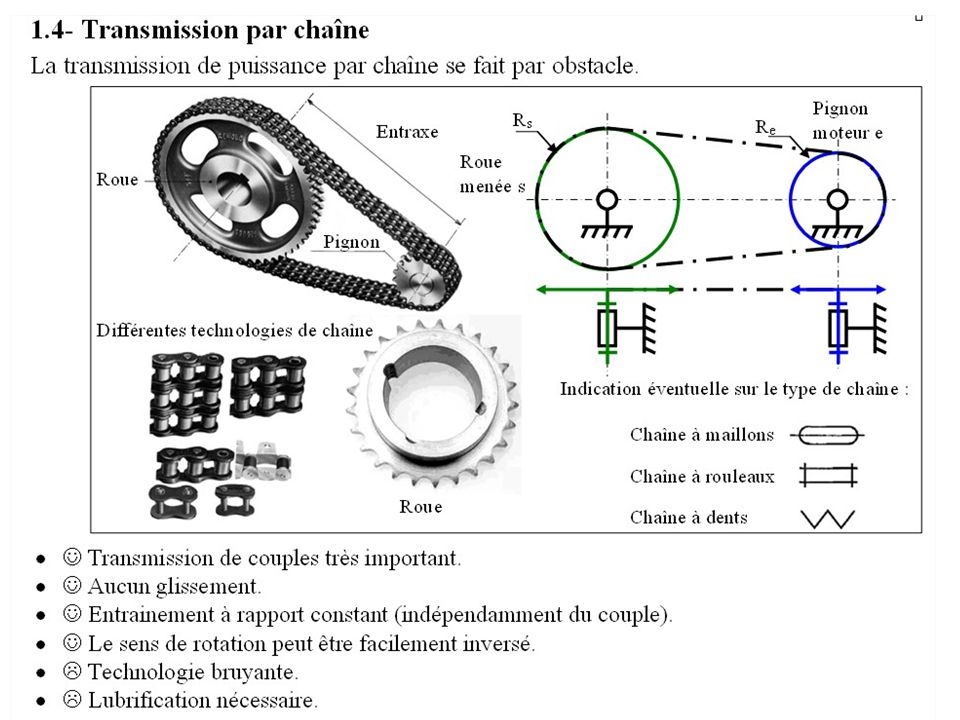
I LES REDUCTEURS DE VITESSE
Réducteur

4
1-1 Les roues de friction

5
Exemple du système KERS (kinetic Energy Recovery System)
Roue entrainée en rotation Embrayage et train d’engrenages Entrainement de roues arrière CVT module (Continuously Variable Transmission) Variation continue de la vitesse par l’utilisation de roues de friction
 Variation continue de la vitesse par l’utilisation de roues de friction.")
6
Animations

7
1-1 Les roues de friction (suite)
Ce calcul est développé plus tard à propos des engrenages un multiplicateur de vitesse un réducteur de vitesse

11
Y X I O2 O1 1 2

12
La condition de roulement sans glissement en I impose :
Y Y 1 La condition de roulement sans glissement en I impose : O1 I Or : I O2 X 2

13
I O1 Le contact intérieur en I ne provoque pas d’inversion du sens de rotation. O2

15
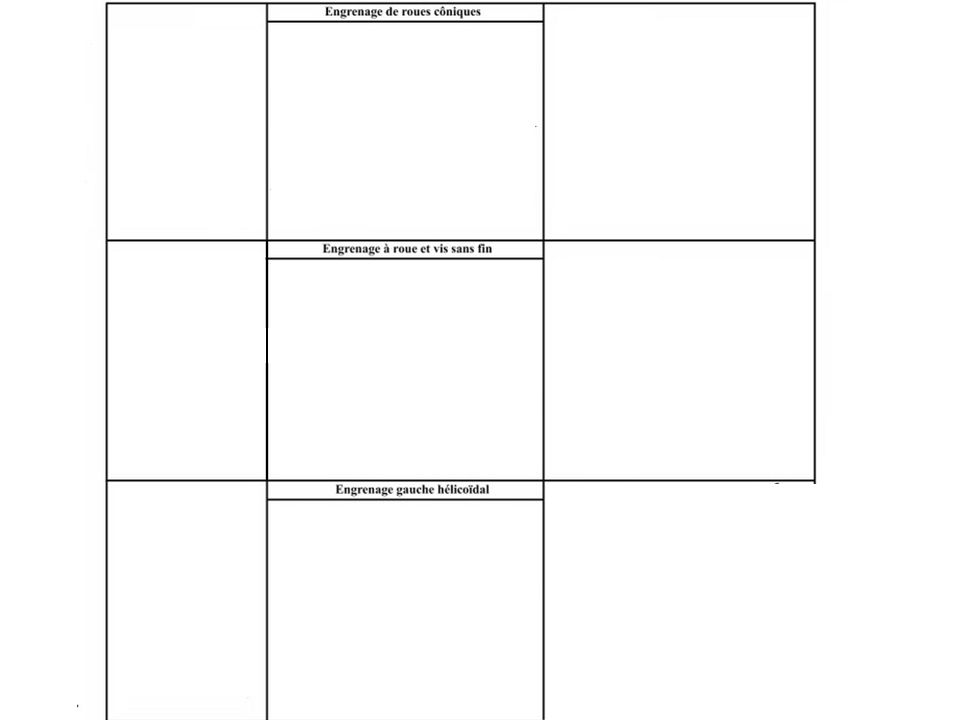
Dentures Hélicoïdales Aucune indication particulière
Type de dentures Dentures droites Dentures Hélicoïdales Dentures à chevrons Aucune indication particulière

18
Dimensions caractéristiques Le nombre de filets de la vis
Le ½ angle au sommet des cônes. Type de dentures Droites Hélicoïdales Spirale Le nombre de filets de la vis

20
F12 T N

21
On note donc une composante tangentielle T utile
R F1 F T R T A F1 R T F F=F1+R A F1 F=A+T+R On note donc une composante tangentielle T utile + deux composantes inutiles : A la composante axiale et R la composante radiale

22
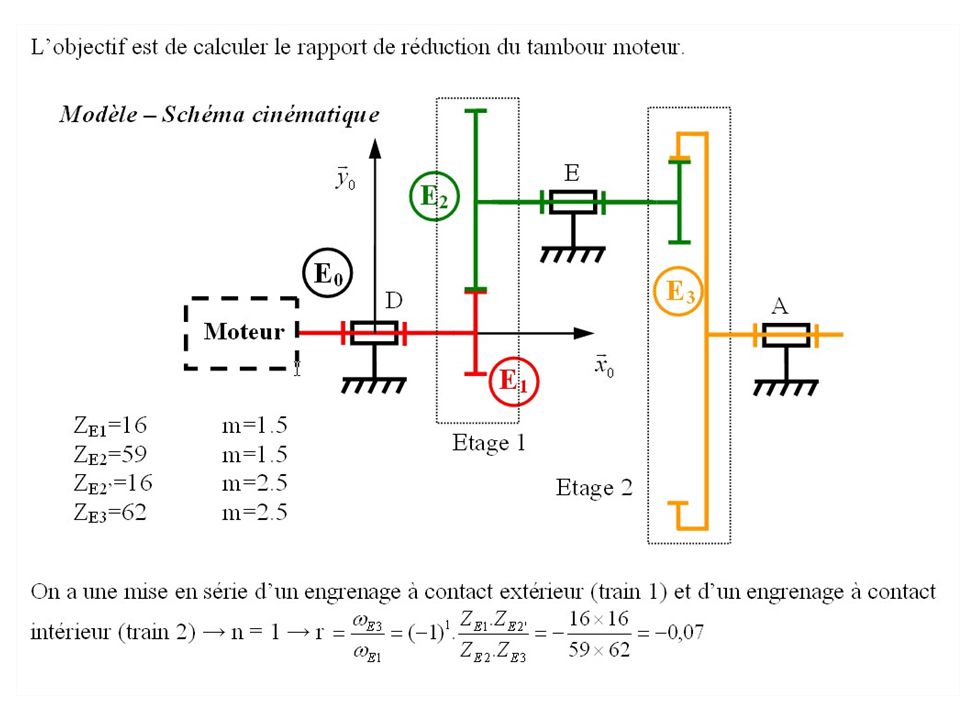
L ’ensembe 12 constitue un engrenage dont le rapport est :
L’arbre intermédiaire est commun à 2 et à 3 Donc Produit des nbs de dents des roues menantes Produit des nbs de dents des roues menées *n : est le nombre de contacts extérieurs

26
Y Z 1 2 4 3 O A X Y I J

27
Couronne 3 bloquée Planétaire 1 bloqué
Porte satellite 4 bloqué 2 2 2 3 3 4 4 4 1 1 1 Planétaire 1 bloqué 3

28
Y Z 1 2 4 3 O A X Y I J

29
Y Z 1 2 4 3 J Y A I X O 3 = 0 avec avec

30
Interprétation graphique
J CIR 2/0 Y Z 1 2 4 3 J Y V(A,2/0) = A CIR 4/2 V(A,4/0) V(I,2/0) = A I CIR 2/1 I V(I,1/0) X O 3 = 0 O CIR 1/0 O CIR 4/0 O CIR 1/0 I CIR 2/1 J CIR 2/0 O CIR 4/0 A CIR 4/2 avec
 = A CIR 4/2. V(A,4/0) V(I,2/0) = A. I CIR 2/1. I. V(I,1/0) X. O. 3 = 0. O CIR 1/0. O CIR 4/0. O CIR 1/0. I CIR 2/1. J CIR 2/0. O CIR 4/0. A CIR 4/2. avec.")
31
Même calcul que pour le cas A
Y O A X Y I J 2 3 4 Z 1 Même calcul que pour le cas A avec

32
Interprétation graphique
Y V(J,2/0) = V(J,3/0) J Y 2 J CIR 2/3 3 V(A,2/0) = A CIR 4/2 4 A V(A,4/0) I CIR 2/1 I Z X O O CIR 4/0 1 O CIR 3/0 O CIR 4/0 A CIR 4/2 I CIR 2/1 Or Car le planétaire 1 est bloqué O CIR 3/0 J CIR 3/2
 = V(J,3/0) J. Y. 2. J CIR 2/3. 3. V(A,2/0) = A CIR 4/2. 4. A. V(A,4/0) I CIR 2/1. I. Z. X. O. O CIR 4/0. 1. O CIR 3/0. O CIR 4/0. A CIR 4/2. I CIR 2/1. Or. Car le planétaire 1 est bloqué. O CIR 3/0. J CIR 3/2.")
33
Y O A X Y I J 2 3 4 Z 1 Ici le 4 est fixe par rapport au bâti, Il s’agit donc d’un train simple. Le calcul correspond exactement à celui qui est fait pour calculer la raison dans les cas A et B

34
or 4 est bloqué par rapport au bâti
Interprétation graphique Y O A X Y I J V(J,2/0) = V(J,3/0) 2 3 A CIR 2/0 V(I,2/0) = 4 I CIR 2/1 V(I,1/0) Z 1 O CIR 1/0 O CIR 3/0 O CIR 1/0 I CIR 2/1 A CIR 4/2 or 4 est bloqué par rapport au bâti J CIR 3/2 O CIR 3/0
 = V(J,3/0) A CIR 2/0. V(I,2/0) = 4. I CIR 2/1. V(I,1/0) Z. 1. O CIR 1/0. O CIR 3/0. O CIR 1/0. I CIR 2/1. A CIR 4/2. or 4 est bloqué par rapport au bâti. J CIR 3/2. O CIR 3/0.")
35
Un train épicycloïdal est dit plan si tous les axes sont parallèles, ce sont la majorité des trains (roue de camion, treuil, motoréducteur, …). Il existe 4 configurations de train épicycloïdal plan.

36
1.73 Compléments sur les trains d’engrenages épicycloïdaux
MOTEUR EMBRAYAGE Un train épicycloïdal est dit sphérique si tous les axes sont concourants, on y retrouve donc des engrenages coniques (différentiel de voiture, …) BOITE DE VITESSES ROUE GAUCHE ROUE DROITE DIFFERENTIEL DIFFERENTIEL Satellite y4 Porte satellites Satellite Planétaire vers roue droite Planétaire vers roue droite x0 Porte satellites Planétaire vers roue gauche Planétaire vers roue gauche
 BOITE DE VITESSES. ROUE GAUCHE. ROUE DROITE. DIFFERENTIEL. DIFFERENTIEL. Satellite. y4. Porte satellites. Satellite. Planétaire vers roue droite. Planétaire. vers roue. droite. x0. Porte. satellites. Planétaire vers roue gauche. Planétaire vers roue gauche.")
40
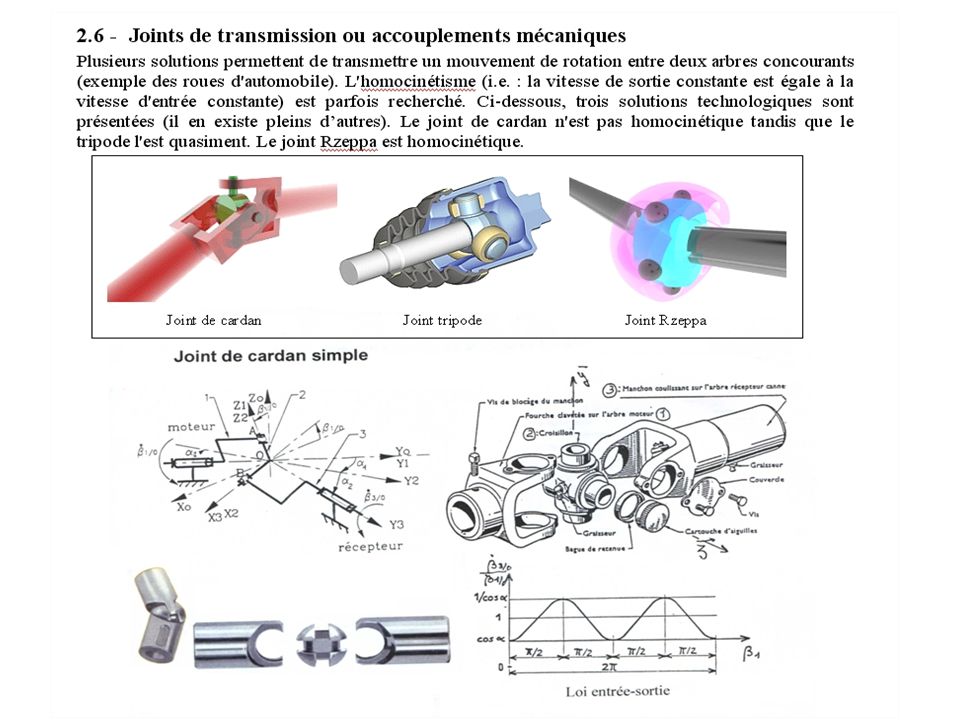
Voir le diaporama sur les joints de transmission (DL n°2)
Fin Voir le diaporama sur les joints de transmission (DL n°2)
")
Présentations similaires