Télécharger la présentation
1
Contrôle de rythme dans un modèle du cycle de la protéine per chez la Drosophile Béatrice LAROCHE, Daniel CLAUDE, Jean CLAIRAMBAULT Université Paris Sud-L2S SUPELEC, Plateau du Moulon 3 rue Joliot-Curie 91190 Gif sur Yvette INRIA Rocquencourt BP105 78153 LE CHESNAY CEDEX EPI 0118 INSERM "Chronothérapeutique des Cancers" Hôpital Paul Brousse 14 avenue P.V. Couturier 94807 Villejuif Cedex (France)
.")
2
PER 0 (P 0 ) per mRNA (M) per transcription nuclear PER (P N ) PER 1 (P 1 ) PER 2 (P 2 ) V1V1 V2V2 V3V3 V4V4 s d m k1k1 k2k2 - MODELE DE SYNTHESE DE LA PROTEINE per CHEZ LA DROSOPHILE (daprès A. Goldbeter, Biochemical Oscillations and Cellular Rhythms)
.")
3
SYNTHESE DE LA PROTEINE per CHEZ LA DROSOPHILE MODELE MATHEMATIQUE (daprès A. Goldbeter, Biochemical Oscillations and Cellular Rhythms) M= quantité dARN messager, P N,P 2,P 1,P 0 = quantités de protéines PER nucléaire, di-,mono-, et non-phosphorylés.
 M= quantité dARN messager, P N,P 2,P 1,P 0 = quantités de protéines PER nucléaire, di-,mono-, et non-phosphorylés..")
4
VALEURS NUMERIQUES NOMINALES DES PARAMETRES DU MODELE Différentes valeurs de d = mutations, Commande= k s (t), valeur nominale k s =0.78
, valeur nominale k s =0.78")
6
ROBUSTESSE DU MODELE paramètres et commande du modèle >0, état initial>0 létat reste positif à tout instant quelles que soient les valeurs >0 des paramètres, toujours la même structure déquilibre: Unique équilibre stable Unique équilibre instable, entouré dun cycle limite stable Pas de point déquilibre (système explosif)
")
7
CONTRÔLE DU RYTHME PAR k s CONSTANT

8
Manque defficacité Manque de robustesse

9
PLANIFICATION DE TRAJECTOIRES Fabriquer une trajectoire admissible ( x(t), u(t) ) du système, où 0 t T, qui raccorde létat initial à létat final. État x 0 ou cycle limite initial à t = 0 État final x T à t=T

10
PLANIFICATION PAR PLATITUDE Système dynamique plat = trajectoires paramétrées par une fonction y(t) et ses dérivées. Dans notre cas: y(t)=M(t) M périodique toutes les variables périodiques, de même période
=M(t) M périodique toutes les variables périodiques, de même période.")
11
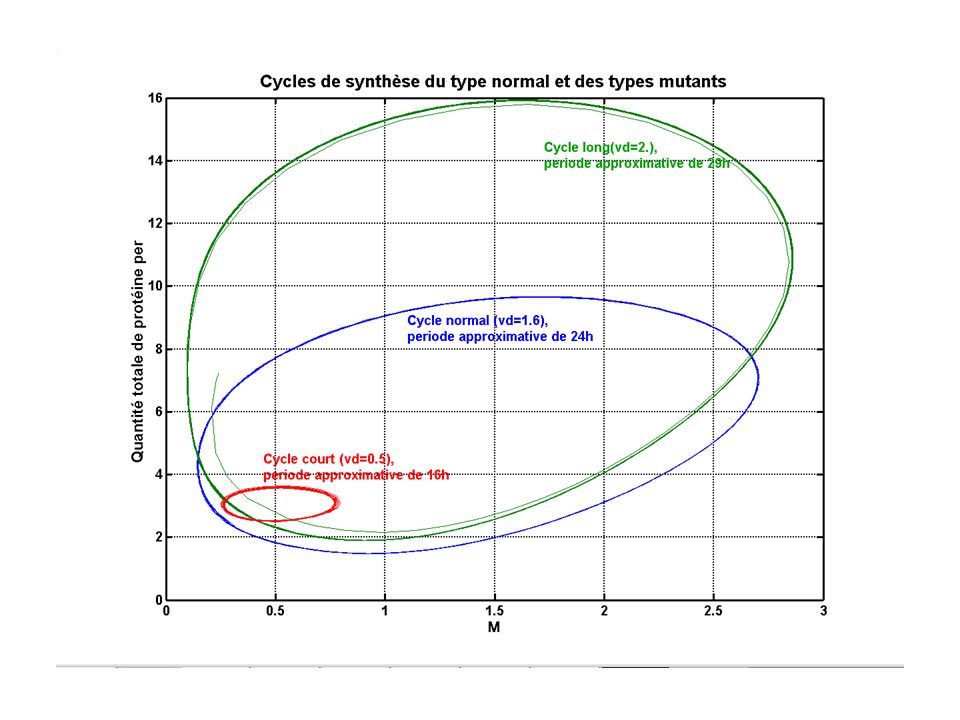
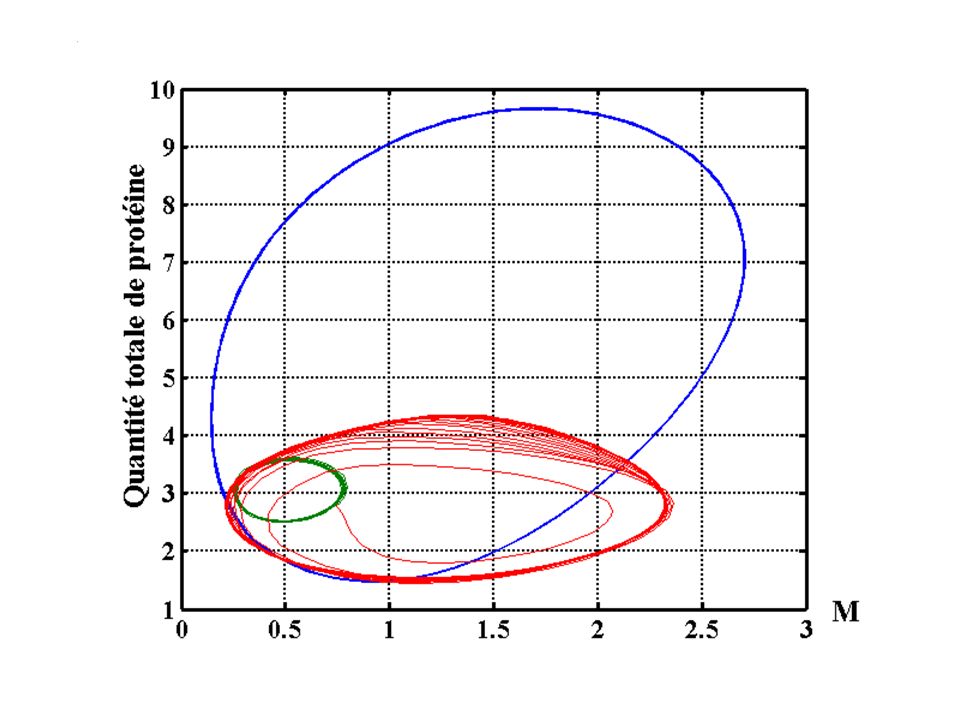
CONSTRUCTION DE LA COMMANDE k s POUR LA MUTANTE A PERIODE COURTE Md= M désiré (M obtenu sur le cycle normal, d =1.6), périodique de période 24H environ. loi k s périodique, mais qui passe (sur de courtes plages) par des valeurs négatives! on remplace ces valeurs négatives par de faibles valeurs positives: Loi k s périodique, positive, proche de k s qui aboutit au résultat recherché.
 par des valeurs négatives. on remplace ces valeurs négatives par de faibles valeurs positives: Loi k s périodique, positive, proche de k s qui aboutit au résultat recherché..")
12
COMMANDE ks POUR LA MUTANTE A PERIODE COURTE








 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")
 Dominique HABAULT.>")












. Pourquoi des modèles impulsionnels ? -impulsions -> dépolarisent.>")