Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Observation dynamique dun PL & prévision de risque de renversement Présenté par : Bouteldja Mohamed Arcos2004 Thème 11

2
Objectif du thème 11 : Rappel sur les travaux effectuée : Système dalerte embarqué sur le véhicule ; Mise en disposition des critères ; Système dalerte embarqué sur le véhicule ; Mise en disposition des critères ;

3
Modèle de synthèse Observateur terme correcteur Principe Connaissance de létat et des forces État dynamique Variables non mesurées Variables mesurées Observateurs Estimateurs Arcos2004 Thème 11

4
Organigramme de déclaration dalerte Contrôle Observateur détat Génération dalertes Traitement de données Étape 3Étape 1 Étape 2 Arcos2004 Thème 11

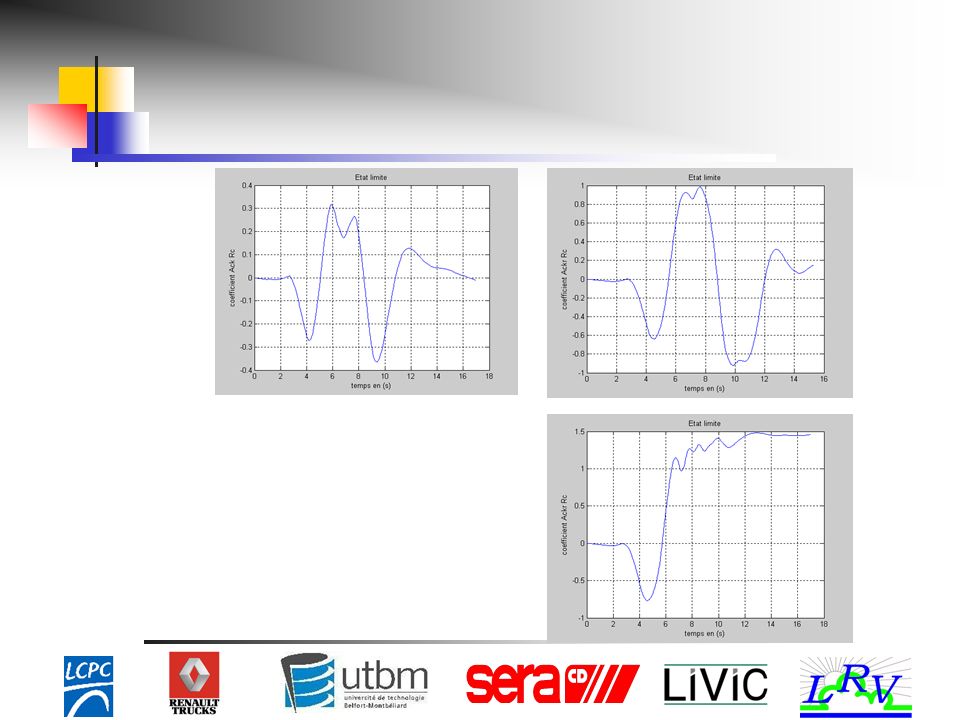
5
Cas de non-renversement Génération dalertes Traitement de données Situation 1 Arcos2004 Thème 11

6
Cas de limite de renversement Traitement de données Situation 2 Arcos2004 Thème 11 Génération dalertes

7
Cas de renversement Traitement de données Arcos2004 Thème 11 Situation 3 Génération dalertes

8
Perspective Définir des critères limites des situations accidentogènes. Définir le critère le plus fiable pour générer lalerte. Élaborer des stratégies dalertes et dactions pour prévenir les situations à risques. Élaborer des zones limites. Arcos2004 Thème 11

Présentations similaires












>")






