Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Notion d'asservissement
A. Objectifs de la séquence: à l'issue de la séquence, il faut être capable de: Déterminer la fonction de transfert d’un système bouclé Déterminer par la méthode de BODE la stabilité d’un asservissement. Connaître les fonctions de transferts élémentaires. Savoir associer les différentes fonctions élémentaires.

2
B) REPRESENTATION FONCTIONNELLE D’UN SYSTEME DE TRAITEMENT ANALOGIQUE.
Tout signal périodique peut-être étudié dans le domaine temporel ou fréquentiel d’après Fourier.

3
B.1) La variable de LAPLACE (p=jω)
Exemple, soit à étudier un simple circuit R-C auquel on applique un échelon de tension. Deux méthodes de calcul s’offrent à nous : 1er méthode, utilisation des équation différentiels Pour déterminer K il faut connaître les conditions initiales par exemple uc(t)=0 à t=0
=0 à t=0.")
4
La courbe de réponse est ainsi la suivante :

5
Théorème de la valeur finale et de la valeur initiale
2eme Méthode Utilisation de la variable de LAPLACE On utilise la notation p (variable de LAPLACE) On retiendra que p =jω dans le cas d’une étude par la méthode de BODE. LAPLACE permet de résoudre les équa diff linéaires en tenant compte des conditions initiales imposées sans introduire de solutions générales ni de constantes arbitraires. Il existe 2 théorèmes importants: (qui permettent d’éviter de retourner dans le domaine temporel). Théorème de la valeur finale et de la valeur initiale valeur initiale valeur finale
 On retiendra que p =jω dans le cas d’une étude par la méthode de BODE. LAPLACE permet de résoudre les équa diff linéaires en tenant compte des conditions initiales imposées sans introduire de solutions générales ni de constantes arbitraires. Il existe 2 théorèmes importants: (qui permettent d’éviter de retourner dans le domaine temporel). Théorème de la valeur finale et de la valeur initiale. valeur initiale. valeur finale.")
6
Dans le domaine de LAPLACE l’impédance d’un condensateur s’exprime par :
Z(p)= D’où Connaissant e(p), on peut alors retrouver V(p) pour cela on utilise des tables qui nous permettent de connaître pour différentes expressions temporelles la transformée de Laplace équivalente. Exemple si e(t) est un échelon e(t)=V0 on trouve en consultant les tables la transformée de LAPLACE E(p)=
= D’où. Connaissant e(p), on peut alors retrouver V(p) pour cela on utilise des tables qui nous permettent de connaître pour différentes expressions temporelles la transformée de Laplace équivalente. Exemple si e(t) est un échelon e(t)=V0 on trouve en consultant les tables la transformée. de LAPLACE. E(p)=")
7
On peut ainsi connaître la valeur finale et initiale du système sans avoir à recourir aux conditions initiales au contraire de l’exercice précédent. Exemple Valeur finale Valeur initiale :

8
B.2) Principe d'un asservissement
 Principe d un asservissement")
9
B.3) Fonctions de transferts élémentaires
Amplificateur Vs(t)=KVe(t) VS(p)=K.Ve(p) Dérivateur Vs(t)=Ve'(t) Vs(p)=p.Ve(p) Intégrateur Vs(t)= Vs(p)=1/p .Ve(p)
=KVe(t) VS(p)=K.Ve(p) Dérivateur. Vs(t)=Ve (t) Vs(p)=p.Ve(p) Intégrateur. Vs(t)= Vs(p)=1/p .Ve(p)")
10
Vs(p) = T1(p) . Ve(p) + T2 (p). Ve(p)
B.4) Association de blocs, règle de réduction 1) Cascade Vs(p) = T2(p).Vi(p) Vi(p) = T1(p) . Ve (p) Vs(p) = T1( p) . T2 (p) .Ve(p) 2) parallèle Vs(p) = T1(p) . Ve(p) + T2 (p). Ve(p) = (T1(p) + T2(p)).Ve(p)
 Association de blocs, règle de réduction. 1) Cascade. Vs(p) = T2(p).Vi(p) Vi(p) = T1(p) . Ve (p) Vs(p) = T1( p) . T2 (p) .Ve(p) 2) parallèle. Vs(p) = T1(p) . Ve(p) + T2 (p). Ve(p) = (T1(p) + T2(p)).Ve(p)")
11
3) Rétroaction Vs=T1.ε=T1(Ve-T2Vs) Vs(1+T1T2) = T1.Ve
•LA boucle ouverte est le produit des fonctions de transfert T1T2

12
C) PROPRIETES D'UN SYSTEME ASSERVI
Un bon système asservi se caractérise par : •Une erreur très faible et si possible nulle en régime permanent •Un temps de réponse tr5% le plus court possible en régime transitoire Malheureusement, ces deux exigences sont souvent contradictoires et il faudra se satisfaire d’un compromis.

13
Un système asservi : Améliore la précision Améliore la rapidité Réduit les effets des perturbations. Peut rendre un système instable.

14
C.1) Précision La boucle de retour améliore la précision •Plus le besoin en énergie (ou plus la vitesse)est élevé plus l'écart ε doit être grand et donc plus l'imprécision sera grande. Plus le gain de l'ampli G est élevé, plus l'écart est petit donc meilleur est la précision. Pour augmenter la précision il faut augmenter le gain d'amplification de l'asservissement.
est élevé plus l écart ε doit être grand et donc plus l imprécision sera grande. Plus le gain de l ampli G est élevé, plus l écart est petit donc meilleur est la précision. Pour augmenter la précision il faut augmenter le gain d amplification de. l asservissement.")
15
C.2) Calcul de l’erreur L’erreur ε en fonction du signal d’entrée pour un système bouclé est donnée par : recherchons l’erreur pour un signal E(t) du type échelon
 du type échelon.")
17
C.3) Stabilité Instable si le gain en B.O AB= -1 c.à.d G=0dB , φ = -180° en boucle ouverte Dans un asservissement, on s’intéresse en premier lieu à la fonction de transfert en boucle ouverte La Boucle Ouverte est le produit de toutes les fonctions de transfert

18
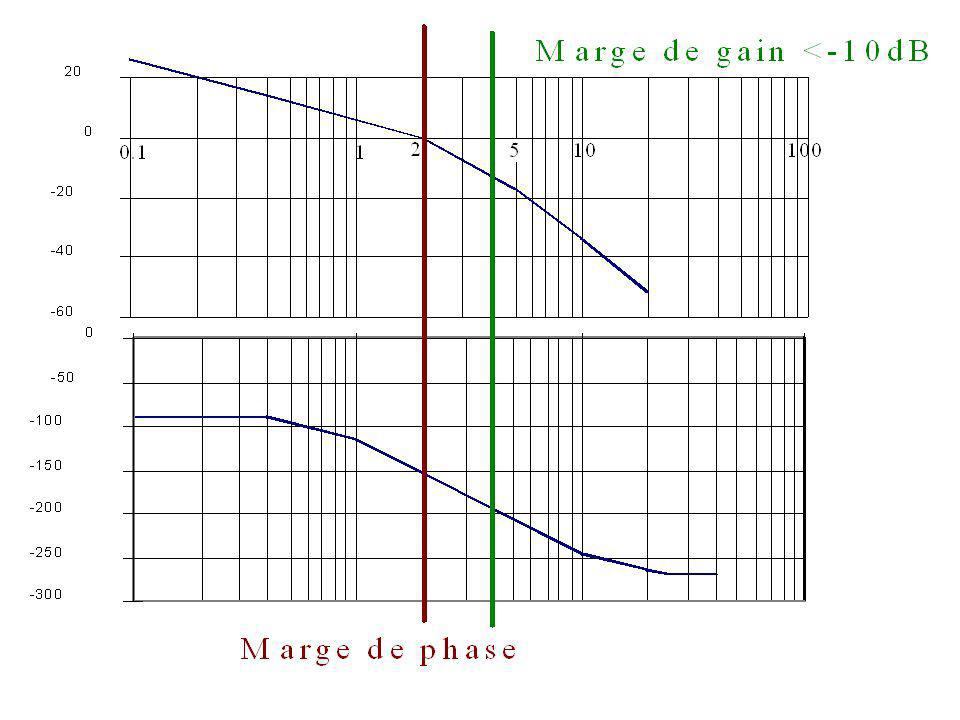
C.3.1) REGLES POUR LA STABILITE
Marge de gain : Marge de phase: Nombre de degrés dont arg (AB(j.ω) se trouve au-delà de –180° à la fréquence de coupure ω1 pour laquelle ( |AB(j.ω)|=1)= (0dB) 45°au mini soit (-135°) pour la stabilité
 se trouve au-delà de –180° à la fréquence de coupure ω1 pour laquelle ( |AB(j.ω)|=1)= (0dB) 45°au mini soit (-135°) pour la stabilité.")
19
•Tracer dans le plan de Bode la caractéristique du gain et de la phase de la fonction de transfert en BO suivante :

21
D) EXEMPLE D'ASSERVISSEMENT
Compléter les différentes fonctions de transfert:

Présentations similaires





 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")
 signal.>")
 : I. Propriétés physiques des roches : densités, aimantations induites et.>")











: Résoudre une équation.>")