Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Les Capteurs

2
Energie électrique de commande
La nécessité de Capteurs Chaîne d’Acquisition HOMME, AUTRES PC Image représentative de la grandeur à mesurer Grandeur à mesurer MO+VA EXTERIEUR frontière UNITE CENTRALE Traiter les Informations MODULES DE DIALOGUES Communiquer avec autres PC et Opérateur Energie électrique de commande PC PREACTIONNEUR Transformer l’Energie, la distribuer TRANSMETTEUR Transmettre l’Energie, Transformer l’action ACTIONNEUR Convertir l’Energie EFFECTEUR Agir sur la Matière d’Oeuvre Energie de Puissance Type d’énergie souhaitée Action modifiée MO Energie de Commande Energie PO CAPTEUR(S) Acquérir et transmettre l’information
 Acquérir et transmettre l’information.")
3
Gm sd Sm correcteur Commande de puissance Système physique
Chaîne d’acquisition Grandeurs d’influences consigne écart Grandeur à mesurer Signal exploitable + - Transformer Gm en Sd Adapter le signal Transmettre le signal Gm sd Sm Capteur Conditionneur grandeur à mesurer signal électrique de bas niveau signal de mesure Grandeurs d’influences Transmetteur Traiter le signal Signal exploitable Signal de mesure transmis

4
Le capteur nous donne la relation S=f(m)
Dans le domaine nominal d’emploi, on va définir les caractéristiques métrologiques suivantes : · Etendue de mesure · Plage d’utilisation · Domaine de linéarité · Sensibilité statique et dynamique · Résolution et précision · Rapidité et temps de réponse · Hystérésis Répétitivité · Etalonnage · …

5
Les Détecteurs de Proximité
Les capteurs de fin de course ou détecteurs de position Détecteur Détecter la présence d’un objet Présence ou non de l’organe au lieu désiré Signal électrique +/-x Volts Les contacteurs Les interrupteurs à lame souple (ILS)
")
6
Les Détecteurs de Proximité
Les détecteurs de proximité inductifs ou magnétiques Avantages : Pas de contact physique avec l’objet détecté. Pas d’usure ; possibilité de détecter des objets fragiles, fraîchement peints… Détecteur statique, pas de pièces en mouvement. Durée de vie indépendante du nombre de manœuvres. Produit entièrement encapsulé dans la résine. Très bonne tenue à l’environnement industriel : atmosphère polluante Inconvénients : ils sont assez chers mais très fiables

8
Les Détecteurs de Proximité
Les détecteurs de proximité à commande opto électronique Détecteur Détecter la présence d’un objet Présence ou non de l’organe au lieu désiré Signal binaire 0 ou 1 Avantages : Pas de contact physique avec l’objet détecté. Pas d’usure ; possibilité de détecter des objets fragiles, fraîchement peints… Détecteur statique, pas de pièces en mouvement. Durée de vie indépendante du nombre de manœuvres. Inconvénients : Sensibles à la poussière et aux perturbations.

9
Nom Illustration Les Détecteurs de Proximité Barrage Réflex Proximité
Les détecteurs de proximité à commande opto électronique Nom Illustration Barrage Réflex Proximité

10
La mesure de position Les capteurs de position analogiques
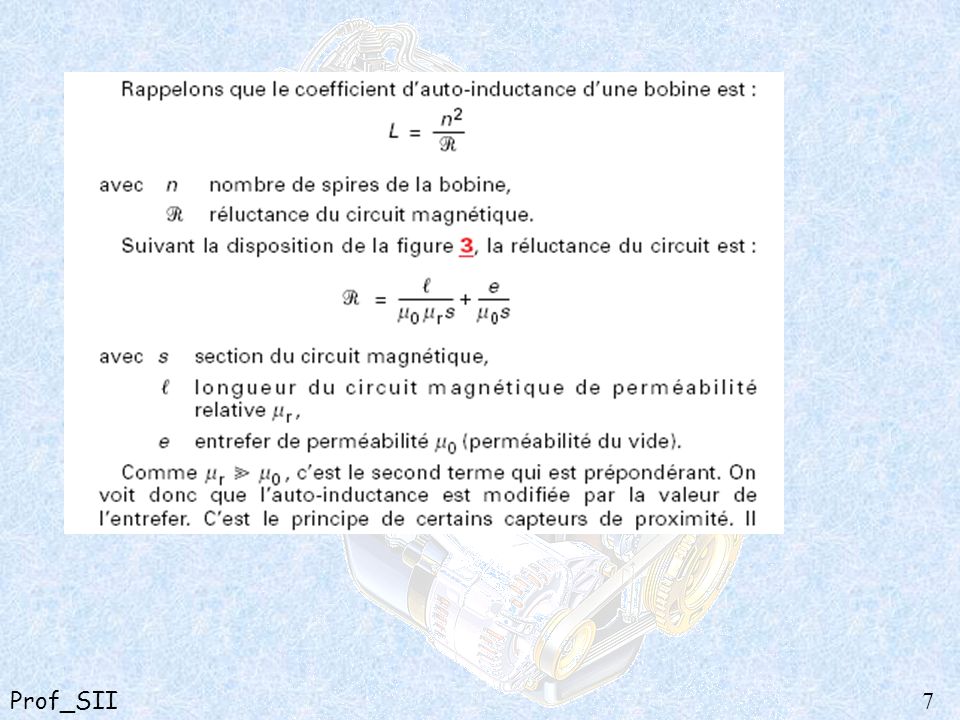
La mesure d’un déplacement, ou d’une position, revient toujours à mesurer des déplacements circulaires ou linéaires. Deux grands critères sont utiles pour juger de la qualité d’un capteur de position : Sa résolution : c’est la plus petite valeur mesurable Son étendue de mesure : elle est définie par les valeurs extrêmes mesurables par le capteur. Les capteurs de position analogiques Capteur pos analog. Mesurer la position d’un solide Position du solide Grandeur proportionnelle à la position (tension) Le principe de la mesure consiste à mesurer une grandeur physique (souvent d’origine électrique), qui varie en même temps que la grandeur à mesurer appelée mesurande. Ce sont des capteurs généralement basés sur la variation d'impédance d'un dipôle passif. La variation de la grandeur physique à mesurer peut-être liée à : la variation de résistance (R en Ohm) d’une résistance ; la variation de capacité (C en F) d'un condensateur ; la variation d'inductance (L en H) d'une bobine.
 Le principe de la mesure consiste à mesurer une grandeur physique (souvent d’origine électrique), qui varie en même temps que la grandeur à mesurer appelée mesurande. Ce sont des capteurs généralement basés sur la variation d impédance d un dipôle passif. La variation de la grandeur physique à mesurer peut-être liée à : la variation de résistance (R en Ohm) d’une résistance ; la variation de capacité (C en F) d un condensateur ; la variation d inductance (L en H) d une bobine.")
11
La mesure de position Les capteurs de position analogiques
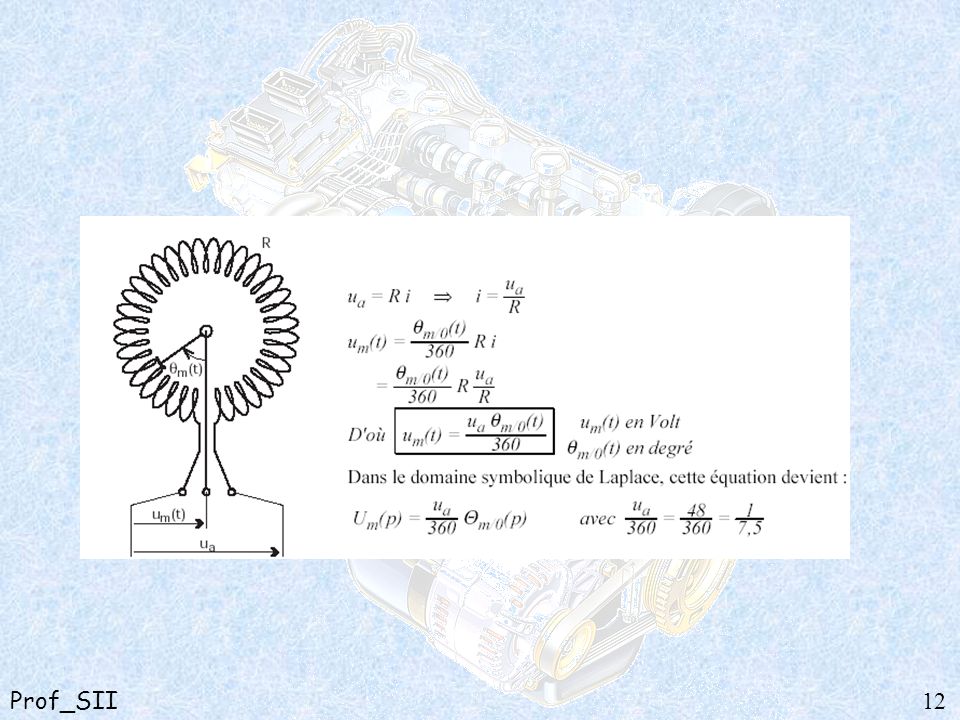
Les capteurs potentiométriques Résolution Elle est théoriquement infinie pour les pistes en plastique constitué d’un polymère chargé en graphite, conducteur, mais elle est directement liée au diamètre du fil de bobinage pour les pistes bobinées.

13
La mesure de position Les capteurs de position analogiques
Les capteurs potentiométriques Avantages Simplicité de fonctionnement et d’exploitation du signal électrique en sortie Précision assez forte car la résolution est bonne Peu chers Inconvénients Bruit dans le signal engendré par le frottement du curseur sur la piste Usure car le frottement mécanique entre le curseur et la piste détériore les éléments en contact Durée de vie limitée

14
La mesure de position Les capteurs de position analogiques
Les capteurs capacitifs Avantages Grande sensibilité Inconvénients Faible étendue de mesure (<1cm) Relativement complexes en traitement du signal a posteriori
 Relativement complexes en traitement du signal a posteriori.")
15
La mesure de position Les capteurs de position analogiques
Les capteurs inductifs Avantages Grande sensibilité Inconvénients Faible étendue de mesure (<50 cm) Relativement complexes en traitement du signal a posteriori
 Relativement complexes en traitement du signal a posteriori.")
16
Mesurer la position d’un solide
La mesure de position Les capteurs de position numériques Capteur pos. num. Mesurer la position d’un solide Position du solide Signal numérique Les codeurs incrémentaux Résolution Sa résolution, donc en grande partie sa précision et sa qualité, est liée au nombre de fentes. Etendue de mesure Elle est a priori infinie

17
Zone S1 S2 a b 1 c d e f g Pour un couple de zones, il y a quatre combinaisons possibles pour S1 et S2. Pour que le capteur soit capable de reconnaître 500 positions différentes, il faut donc 125 couples de zones

18
La mesure de position Les capteurs de position numériques
Les codeurs incrémentaux Détection du sens de rotation De gauche à droite De droite à gauche

19
La mesure de position Les capteurs de position numériques
Les codeurs absolus : ce qui tombe souvent En code binaire naturel

20
La mesure de position Les capteurs de position numériques
Les codeurs absolus : ce qui tombe souvent En code gray pour limiter le risque d’erreur

21
La mesure de vitesse La génératrice tachymétrique
Génératrice tachymétrique continue Tension en V Vitesse rotation en rad/s

22
La mesure de vitesse A partir de la mesure de position
Les codeurs incrémental On utilise l’information de position donnée par le codeur incrémental pour donner la vitesse. Le nombre de transitions reçues des deux signaux du codeur, pendant un temps fixé appelé temps d'échantillonnage, est une image numérique de la vitesse de rotation. Si on note le temps d'échantillonnage de mesure "tem" on peut en déduire le gain du capteur de vitesse: Sn (en inc)nc.) v N (en tr/min) où: N est la vitesse de rotation exprimée en tr/min, Sn est la sortie mesure numérique de vitesse exprimée en incréments (inc), v est le gain du capteur exprimé en inc/tr/min.
nc.) v. N. (en tr/min) où: N est la vitesse de rotation exprimée en tr/min, Sn est la sortie mesure numérique de vitesse exprimée en incréments (inc), v est le gain du capteur exprimé en inc/tr/min.")
23
La mesure de l’accélération
Accéléromètres à jauges de contrainte

24
La mesure d’une déformation
Jauges résistives mécaniques K est appelé le facteur de jauge. Son ordre de grandeur est de 2 pour les jauges métalliques.

25
La mesure d’une force et d’un couple
A partir d’une mesure de déformation

26
La mesure d’une pression
A partir d’une mesure de déformation

Présentations similaires



















>")