Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
BUS DE DONNEES Dans ce chapitre on parlera de tous les types de bus mis à part ceux concernés par les Disques Durs (Cf. Chapitre 6). Au cours de ce chapitre on abordera: Le vocabulaire propre aux bus, leur organisation et leur variété, les techniques communes, les bus de terrain, GPIB et autres, les bus internes, bus STD et bus récents, les bus externes, USB et IEEE 1394. Rem: Le transport des données d'un endroit à un autre est une communication dans l'espace. On ne traite que les trés courtes distances (pas des résaux ni Internet)
")
2
Réseaux et communication.
Un systéme informatique est constitué de composants divers : processeur, mémoire, caches. Ils doivent ₨tre reliés entre eux pour que soient acheminés des signaux de commande, de données, d'adresse, etc. Avant les bus, les liaisons internes étaient réalisées point à point entre les composants par des fils spécialisés => Couteux en temps (il allait tout cabler) et en argent. Le bus apporte la simplification technique et le coût moindre qui l'ont fait adopter trés largement. En contrepartie, il interdit les transferts simultanés et peut devenir un goulot d'étranglement, selon son débit et le volume des demandes. Il unifie le mode de fonctionnement global de la machine, synchrone ou asynchrone en imposant son protocole. Les bus sont affectés par la tendance profonde à la parallélisation.
 et en argent. Le bus apporte la simplification technique et le coût moindre qui l ont fait adopter trés largement. En contrepartie, il interdit les transferts simultanés et peut devenir un goulot d étranglement, selon son débit et le volume des demandes. Il unifie le mode de fonctionnement global de la machine, synchrone ou asynchrone en imposant son protocole. Les bus sont affectés par la tendance profonde à la parallélisation.")
3
AVANTAGES DU BUS · Souplesse, on ajoute facilement des circuits nouveaux, les périphériques sont normalisés et donc portables. · Coût faible. INCONVÉNIENTS DU BUS · Il crée un goulot d'étranglement, sa bande passante est limitée, les demandes ne peuvent pas ₨tre satisfaites simultanément. · La célérité des signaux est limitée, par la longueur du bus, par le nombre d'appareils connectés. Un bus est un moyen de communication entre plusieurs composants connectés par destination.

4
Les 7 types de réseaux de communication:
· Les réseaux internationaux ou nationaux, par des lignes spécialisées ou banalisées, par des voies terrestres, hertziennes ou satellitaires. · Les réseaux locaux administratifs ou de gestion technique : Ethernet, Starlan. · Les réseaux locaux de coordination ou de salles de commandes : Map, Factor, Lac, assez comparables aux précédents. · Les bus de terrain parfois nommés réseaux de terrain : GPIB (IEEE488), FIP, Profibus, D-Hart, etc. Ils relient des appareils de nature industrielle tels que capteurs et actionneurs. · Les bus de périphériques destinés à piloter un ou plusieurs périphériques de nature informatique : pour les disques IDE, SCSI, etc. et pour d'autres périphériques IEEE1394 et USB. · Les bus internes des ordinateurs ou bus machines : Multibus I et II, VME, ISA, EISA, PCI, FB+, etc. · Les bus des processeurs sont devenus internes puisque logés dans le circuit unique du processeur.
, FIP, Profibus, D-Hart, etc. Ils relient des appareils de nature industrielle tels que capteurs et actionneurs. · Les bus de périphériques destinés à piloter un ou plusieurs périphériques de nature informatique : pour les disques IDE, SCSI, etc. et pour d autres périphériques IEEE1394 et USB. · Les bus internes des ordinateurs ou bus machines : Multibus I et II, VME, ISA, EISA, PCI, FB+, etc. · Les bus des processeurs sont devenus internes puisque logés dans le circuit unique du processeur.")
5
VOCABULAIRE DES BUS Avant tout, un bus est un dispositif de transmission de signaux électriques entre parties d'un systéme électronique. Ce dispositif est un ENSEMBLE DE CONDUCTEURS, alimenté, organisé et utilisé de préférence en conformité avec une norme ou un usage reconnu. Chacun des circuits CONNECTES au bus est lié à tout ou partie de ces conducteurs. La gestion du bus est régi par le PROTOCOLE de communication, ensemble des régles d'établissement, de maintien ou échange et de libérationde la communication. Quand un m₨me conducteur porte des données dont la nature change d'un instant à l'autre, on dit qu'il est MULTIPLEXE. Un ensemble de dispositifs interconnectés par un bus constituent avec lui un SEGMENT de bus. Le MAÎTRE du bus est un dispositif unique à un instant donné. Si plusieurs organes peuvent avoir cette qualité, ils sont régis par un ARBITRE, physique ou immatériel.

6
La suite constituée par l'établissement, l'échange, la rupture de la communication est une TRANSACTION. Les régles qui régissent les transactions constituent le PROTOCOLE. Une émission à destination de tous les récepteurs potentiels est dite BROADCAST. Un bus est ASYNCHRONE s'il n'a pas ou n'utilise pas de ligne portant un signal d'horloge. Un bus est SYNCHRONE si un conducteur (au moins) porte les signaux d'une horloge centrale ainsi distribuée à tous les dispositifs. Dans ce cas les signaux d'horloge rythment le fonctionnement du bus. L'ARBITRAGE entre maîtres peut ₨tre : · CENTRALISE : un seul circuit arbitre désigne le maître ou bien chaque maître potentiel dispose de lignes de requ₨te et de restitution. · REPARTI : les compétiteurs disposent de toutes les lignes de requ₨tes, le plus prioritaire est élu. Il y a de nombreux systémes de priorité : · le plus prioritaire peut bloquer le bus aussi longtemps qu'il le lui faut, en fin de chaque transaction un moins prioritaire dispose du bus. · la priorité peut ₨tre tournante (systéme du jeton), etc. Un bus est RÉSERVÉ ou DÉDIÉ : bus de données pour les données, d'adresses, etc
 porte les signaux d une horloge centrale ainsi distribuée à tous les dispositifs. Dans ce cas les signaux d horloge rythment le fonctionnement du bus. L ARBITRAGE entre maîtres peut ₨tre : · CENTRALISE : un seul circuit arbitre désigne le maître ou bien chaque maître potentiel dispose de lignes de requ₨te et de restitution. · REPARTI : les compétiteurs disposent de toutes les lignes de requ₨tes, le plus prioritaire est élu. Il y a de nombreux systémes de priorité : · le plus prioritaire peut bloquer le bus aussi longtemps qu il le lui faut, en fin de chaque transaction un moins prioritaire dispose du bus. · la priorité peut ₨tre tournante (systéme du jeton), etc. Un bus est RÉSERVÉ ou DÉDIÉ : bus de données pour les données, d adresses, etc.")
7
STRUCTURES DES BUS,TYPES ET NOMBRES
La structure la plus souvent rencontrée comprend quatre parties distinctes comme figuré ci-dessus. · Alimentation : chaque dispositif a besoin d'alimentation électrique ou au moins de référence électrique. · Données : ce bus est le plus souvent bidirectionnel, on rencontre parfois deux bus unidirectionnels séparés qui doublent le débit utile dans le cas idéal. · Adresses : bus en général unidirectionnel. · Commande : ce sont les lignes qui véhiculent les signaux de commande destinés aux organes connectés au bus, ils proviennent soit du séquenceur, soit de dispositifs autres : maître du bus, canal, dispositif interlocuteur, etc.

8
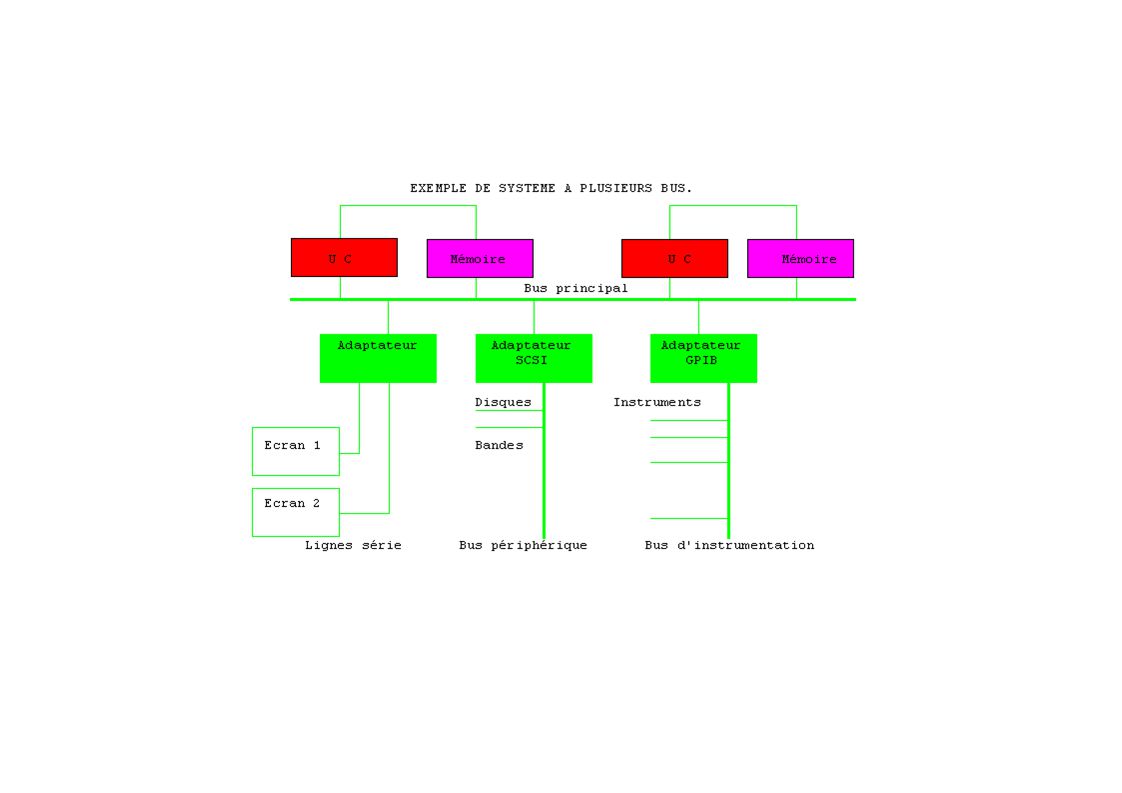
TYPES DE BUS · processeur à mémoire (en général spécifique) Court, haut débit, maximise le débit entre processeur et mémoire, est directement connecté au processeur, est optimisé pour le transport des blocs des caches. Il est parfois nommés bus local par opposition au troisiéme type (exemples VESA, PCI). · bus d'entrée et sortie Long, faible débit par rapport au précédent, il accepte de nombreux dispositifs, est connecté au précédent (exemples IEEE1394, USB) · bus fond de panier (backplane) Le fond de panier est la structure d'interconnexion du châssis. Il a l'avantage de l'unicité (exemples ISA, EISA pour certaines machines) ou est utilisé pour des entrées et sorties. NOMBRE DE BUS Les micro-ordinateurs avaient : · Au tout début un seul bus, machines à 8 bits avec un bus tel que STD, PC-XT et AT avec ISA. · Ensuite deux bus, le Macintosh-II d'Apple avec un NuBus reliant processeur, mémoire et quelques dispositifs d'entrée et sortie, un bus SCSI pour les autres. · Aujourd'hui trois bus, le Pentium III, peu différent du Pentium Pro figuré ci-dessous.
. · bus d entrée et sortie. Long, faible débit par rapport au précédent, il accepte de nombreux dispositifs, est connecté au précédent (exemples IEEE1394, USB) · bus fond de panier (backplane) Le fond de panier est la structure d interconnexion du châssis. Il a l avantage de l unicité (exemples ISA, EISA pour certaines machines) ou est utilisé pour des entrées et sorties. NOMBRE DE BUS. Les micro-ordinateurs avaient : · Au tout début un seul bus, machines à 8 bits avec un bus tel que STD, PC-XT et AT avec ISA. · Ensuite deux bus, le Macintosh-II d Apple avec un NuBus reliant processeur, mémoire et quelques dispositifs d entrée et sortie, un bus SCSI pour les autres. · Aujourd hui trois bus, le Pentium III, peu différent du Pentium Pro figuré ci-dessous.")
10
CONDITIONS GÉNÉRALES DE FONCTIONNEMENT
Chaque élément raccordé au bus doit avoir un identifieur, numéro ou adresse. Une seule communication est possible à un instant donné entre un émetteur et un ou plusieurs récepteurs. Le protocole est identique pour tous les éléments et pour cela nécessite parfois des interfaces d'accés complexes. Le bus utilise beaucoup de câbles et de connecteurs. COMMENT UN BUS EST DÉFINI La définition COMPLÈTE d'un bus, quel qu'en soit l'usage, nécessite : Les caractéristiques mécaniques : nature, diamétre des câbles comme paire torsadée, coaxial, etc. type des connecteurs comme DB9, DB25, s'ils existent. Les caractéristiques électriques : tensions. Les caractéristiques des signaux : limites des transitions, signalisation. La spécification du protocole.

11
IL N'Y A PAS DE VITESSE DANS UN BUS
TECHNIQUES COMMUNES AUX BUS Vitesses, débits, fréquences et performances IL N'Y A PAS DE VITESSE DANS UN BUS La célérité du signal (l'expression vitesse de propagation du signal est impropre mais ordinairement utilisée) la célérité (vitesse) de l'électricité dans un conducteur est d'environ km/s. On ne doit appeler vitesse que la célérité du signal ci-dessus. Quand l'horloge bat à 100 MHz, un cycle dure 10 ns, le signal parcourt 2 m. (1GHz => 20 cm) Le débit ou bande passante est le nombre d'unités de données transmises par seconde : bits, octets, mots. Il est fonction de la largeur du chemin et de la fréquence. Un débit N'EST PAS une vitesse. La fréquence de fonctionnement est le nombre maximum de transitions par seconde
 la célérité (vitesse) de l électricité dans un conducteur est d environ km/s. On ne doit appeler vitesse que la célérité du signal ci-dessus. Quand l horloge bat à 100 MHz, un cycle dure 10 ns, le signal parcourt 2 m. (1GHz => 20 cm) Le débit ou bande passante est le nombre d unités de données transmises par seconde : bits, octets, mots. Il est fonction de la largeur du chemin et de la fréquence. Un débit N EST PAS une vitesse. La fréquence de fonctionnement est le nombre maximum de transitions par seconde.")
12
Les caractéristiques d'un bus sont :
· le débit ou bande passante (bandwith) quantité d'information échangée par unité de temps en Mo/s. · la latence ou temps de latence ou temps d'attente, ou attente (latency), délai de réponse du bus à une requ₨te de transfert en nanosecondes (ns), · la charge, nombre maximum d'unités pouvant ₨tre connectées au bus, · la longueur, longueur physique du bus en métres. Les performances sont réduites par : · La diaphonie qui se produit par la création d'une tension induite par des variations de courants entre conducteurs paralléles ou simplement voisins. La conséquence est la limitation de la fréquence utile. · Les réflexions qui limitent le nombre d'éléments connectés. · L'affaiblissement et les distorsions qui limitent la longueur du bus. Principe de fonctionnement On considére deux registres de 4 bits, constitués de 4 bascules B. On a figuré : · pour l'émetteur, la sortie et la commande de la sortie, · pour le récepteur, l'entrée et la commande d'entrée.
 quantité d information échangée par unité de temps en Mo/s. · la latence ou temps de latence ou temps d attente, ou attente (latency), délai de réponse du bus à une requ₨te de transfert en nanosecondes (ns), · la charge, nombre maximum d unités pouvant ₨tre connectées au bus, · la longueur, longueur physique du bus en métres. Les performances sont réduites par : · La diaphonie qui se produit par la création d une tension induite par des variations de courants entre conducteurs paralléles ou simplement voisins. La conséquence est la limitation de la fréquence utile. · Les réflexions qui limitent le nombre d éléments connectés. · L affaiblissement et les distorsions qui limitent la longueur du bus. Principe de fonctionnement. On considére deux registres de 4 bits, constitués de 4 bascules B. On a figuré : · pour l émetteur, la sortie et la commande de la sortie, · pour le récepteur, l entrée et la commande d entrée.")
14
Asynchrone ou synchrone
Dans le MODE SYNCHRONE : · Un quantum de temps est affecté à chaque phase. Il est indiqué par une horloge, soit unique qui place un signal sur une voie du bus, soit par plusieurs horloges elles-m₨mes synchronisées. · Les échanges sont réglés par un protocole invariable défini par référence au signal de l'horloge. Grâce à cela, il a un débit plus grand que le mode asynchrone. · Les changements d'état se font à des instants prédéterminés. C'est donc le dispositif le plus lent qui impose son cadencement. Dans l'exemple ci-dessous, le signal DP donnée pr₨te (Data Ready ou DR) est émis en m₨me temps que les données. Quatre cycles le séparent de l'arrivée de DA donnée acceptée (DA : Data Accepted). Cet intervalle est prédéfini et fixe, comme l'est l'attente de 2 cycles avant une autre transaction. Il n'y a pas stricto sensu de dialogue entre émetteur et récepteur.
 est émis en m₨me temps que les données. Quatre cycles le séparent de l arrivée de DA donnée acceptée (DA : Data Accepted). Cet intervalle est prédéfini et fixe, comme l est l attente de 2 cycles avant une autre transaction. Il n y a pas stricto sensu de dialogue entre émetteur et récepteur.")
15
Dans le MODE ASYNCHRONE :
· Les échanges sont réglés par entente mutuelle dite poignée de main (handshake). Le maître émet un signal de disponibilité (strobe) de l'information sur le bus, le récepteur retourne un signal d'accusé de réception. · Ce mode accepte une grande variété de dispositifs car les échanges avec les dispositifs rapides ne sont pas pénalisés par l'attente d'une réponse éventuelle des autres.
. Le maître émet un signal de disponibilité (strobe) de l information sur le bus, le récepteur retourne un signal d accusé de réception. · Ce mode accepte une grande variété de dispositifs car les échanges avec les dispositifs rapides ne sont pas pénalisés par l attente d une réponse éventuelle des autres.")
16
L'adressage sur le bus Pour faire une transaction, le maître doit désigner l'interlocuteur par une adresse unique: · L'adressage logique consiste à donner à chaque élément une ou plusieurs adresses prises dans l'espace des adresses. C'est fait soit par des interrupteurs placés sur l'élément lui-m₨me (Unibus, ISA) soit par une affectation décidée par le contrôleur du bus (MCA). · L'adressage géographique utilise les emplacements ou connecteurs (slots) sur lesquels les cartes sont enfichées. Le connecteur a une adresse qui est utilisée par la carte. Les affectations sont faites par le systéme d'exploitation (Multibus-II, Fastbus, Nubus). Généralités sur les protocoles M₨me s'il n'y a pas simultanéité de transmission sur le bus, il y a concurrence entre demandeurs potentiels. Il faut donc répondre aux trois questions : 1. Qui prend possession du bus et comment ? Arbitrage et maîtrise du bus. 2. Pour quoi faire ? Nature et objet des requ₨tes. 3. Comment cela se fait-il ? Forme des requ₨tes et réponses.
 soit par une affectation décidée par le contrôleur du bus (MCA). · L adressage géographique utilise les emplacements ou connecteurs (slots) sur lesquels les cartes sont enfichées. Le connecteur a une adresse qui est utilisée par la carte. Les affectations sont faites par le systéme d exploitation (Multibus-II, Fastbus, Nubus). Généralités sur les protocoles. M₨me s il n y a pas simultanéité de transmission sur le bus, il y a concurrence entre demandeurs potentiels. Il faut donc répondre aux trois questions : 1. Qui prend possession du bus et comment Arbitrage et maîtrise du bus. 2. Pour quoi faire Nature et objet des requ₨tes. 3. Comment cela se fait-il Forme des requ₨tes et réponses.")
17
1) L'identification, ou reconnaissance.
.Dans un premier cas, l'un des deux est maître par décision d'arbitrage. .Dans un deuxiéme cas, le maître est un dispositif tiers qui a re₤u par scrutation ou autre procédure une demande de l'un des deux dispositifs. Dans les deux cas, le maître : .initialise la communication en émettant l'adresse de l'autre élément. .précise la nature du transfert : émission ou réception, .indique s'il y a lieu le type d'information qui sera échangée, adresse, donnée, etc. 2) Le transfert. Aprés identification, les deux interlocuteurs passent dans l'étape de transfert, par exemple A pr₨t à émettre et B pr₨t à recevoir. La transmission d'un mot (au moins) se fera alors par le placement par A du mot sur les voies convenables et l'indication simultanée de la présence de ce mot au moyen d'une autre voie (d'accompagnement). L'ensemble est maintenu pendant un temps suffisant pour que B puisse l'acquérir. 3) la phase de restitution ou relâchement. A re₤oit DA, désactive le positionnement des données et supprime DP.
 Le transfert. Aprés identification, les deux interlocuteurs passent dans l étape de transfert, par exemple A pr₨t à émettre et B pr₨t à recevoir. La transmission d un mot (au moins) se fera alors par le placement par A du mot sur les voies convenables et l indication simultanée de la présence de ce mot au moyen d une autre voie (d accompagnement). L ensemble est maintenu pendant un temps suffisant pour que B puisse l acquérir. 3) la phase de restitution ou relâchement. A re₤oit DA, désactive le positionnement des données et supprime DP.")
18
L'ARBITRAGE Les principes de l'arbitrage Le plus simple est qu'un seul élément soit maître en permanence, c'est le cas dans des systémes où seul le processeur (unique) est maître. Il n'y a pas d'arbitrage entre maîtres. Dans des systémes plus complexes l'arbitrage est nécessaire. On connaît ou on pratique : L'arbitrage statique. Les candidats à la maîtrise sont élus l'un aprés l'autre, demandeur ou non. Le maître élu qui n'a pas de transaction à faire fera une transaction de non opération. Cet arbitrage n'est utilisé qu'avec un protocole synchrone et peu de maîtres potentiels. Il est simple mais consomme de la bande passante en pure perte. Analogie avec l'anneau à jeton. Les arbitrages dynamiques. Le choix de l'élu est fait selon divers algorithmes. La priorité fixe. Chaque élément éligible a une priorité, soit par construction, soit par configuration, soit en fonction d'autres critéres. Il est seul à la posséder. L'arbitre affecte la maîtrise au demandeur le plus prioritaire. Il a l'inconvénient de pouvoir susciter une famine chez les moins prioritaires (terminologie des systémes d'exploitation). Pour l'éviter, un algorithme ou un dispositif doit établir un minimum d'équité. La priorité circulante. Chaque élément re₤oit un numéro indépendant de toute priorité pendant le temps de configuration. A chaque instant d'affectation l'arbitre qui a conservé le numéro de l'utilisateur précédent du bus, parcourt cette liste en partant du numéro suivant et alloue le bus au premier demandeur rencontré.
 est maître. Il n y a pas d arbitrage entre maîtres. Dans des systémes plus complexes l arbitrage est nécessaire. On connaît ou on pratique : L arbitrage statique. Les candidats à la maîtrise sont élus l un aprés l autre, demandeur ou non. Le maître élu qui n a pas de transaction à faire fera une transaction de non opération. Cet arbitrage n est utilisé qu avec un protocole synchrone et peu de maîtres potentiels. Il est simple mais consomme de la bande passante en pure perte. Analogie avec l anneau à jeton. Les arbitrages dynamiques. Le choix de l élu est fait selon divers algorithmes. La priorité fixe. Chaque élément éligible a une priorité, soit par construction, soit par configuration, soit en fonction d autres critéres. Il est seul à la posséder. L arbitre affecte la maîtrise au demandeur le plus prioritaire. Il a l inconvénient de pouvoir susciter une famine chez les moins prioritaires (terminologie des systémes d exploitation). Pour l éviter, un algorithme ou un dispositif doit établir un minimum d équité. La priorité circulante. Chaque élément re₤oit un numéro indépendant de toute priorité pendant le temps de configuration. A chaque instant d affectation l arbitre qui a conservé le numéro de l utilisateur précédent du bus, parcourt cette liste en partant du numéro suivant et alloue le bus au premier demandeur rencontré.")
19
La réalisation de l'arbitrage
On suppose disposer (ce qui est le cas de la plupart des bus) de commandes de base, en général portées par des lignes réservées du bus. BA bus libre (bus available) BR demande de bus (bus request) BB bus occupé (bus busy) BG bus alloué (bus granted) Les trois schémas de l'arbitrage centralisé sont : .la scrutation (polling), .le chaînage en guirlande, chaînage en pétales de marguerite (daisy chain), .la demande indépendante (independant request). La scrutation. L'arbitre dispose des lignes BR, BAC, d'un groupe de lignes de scrutation qui transmettent une adresse à toutes les unités et de la ligne VAL qui valide une adresse ainsi disposée. La ou les unités demanderesses affichent le signal BR unique qui signifie : une unité au moins a demandé le bus. L'arbitre émet successivement les adresses des unités, selon la priorité choisie, et pour chacune, positionne VAL. L'unité qui reconnaît son adresse répond par BAC qui sera maintenu jusqu'à la libération du bus par l'unité en cause.
 de commandes de base, en général portées par des lignes réservées du bus. BA bus libre (bus available) BR demande de bus (bus request) BB bus occupé (bus busy) BG bus alloué (bus granted) Les trois schémas de l arbitrage centralisé sont : .la scrutation (polling), .le chaînage en guirlande, chaînage en pétales de marguerite (daisy chain), .la demande indépendante (independant request). La scrutation. L arbitre dispose des lignes BR, BAC, d un groupe de lignes de scrutation qui transmettent une adresse à toutes les unités et de la ligne VAL qui valide une adresse ainsi disposée. La ou les unités demanderesses affichent le signal BR unique qui signifie : une unité au moins a demandé le bus. L arbitre émet successivement les adresses des unités, selon la priorité choisie, et pour chacune, positionne VAL. L unité qui reconnaît son adresse répond par BAC qui sera maintenu jusqu à la libération du bus par l unité en cause.")
20
La demande indépendante.
Chaque unité branchée sur le bus a une ligne d'accés à l'arbitre qui re₤oit toutes les demandes et choisit selon l'algorithme en vigueur. Les étapes de scrutation ou de passage en chaînage sont évitées au prix de ce câblage supplémentaire.

21
La guirlande Le signal BR de requ₨te est partagé, le signal BG d'allocation est propagé de proche en proche. Le premier dans la guirlande des appareils qui a fait une demande se saisit du bus. Il le rend bus en émettant le signal de libération, complémentaire du signal d'occupation BB (bus busy). Un nouveau cycle d'arbitrage commence.
. Un nouveau cycle d arbitrage commence.")
22
BUS DE TERRAIN Ces bus parfois nommés réseaux de terrain, sont installés "sur le terrain" au contact direct des appareils. On vera au cours de ce chapitre l'IEEE 488 qui a été le premier d'entre eux. Il est encore utilisé mais se révéle souvent insuffisant. Son importance provoque une grande activité de normalisation qui n'a pas encore vraiment abouti. Aux bus de terrain que l'on peut qualifier aujourd'hui de classiques, destinés à l'industrie, il faut ajouter depuis peu de temps les bus domotiques ou immotiques, destinés à la gestion d'équipement ménagers ou d'immeubles. Les deux arguments principaux en faveur des bus de terrain sont : · que cette communication permet d'échanger des données qui sont difficilement transmissibles autrement, · que l'échange des données utilise un mécanisme unique. Les autres arguments favorables sont : · capacité à raccorder des modules divers sur la m₨me ligne, · le parcours de distances plus grandes qu'avec un câblage traditionnel, · la réduction massive du câblage, · la variété des domaines d'application, · la réduction des coûts globaux,

23
· la simplification de la mise en service,
· la réduction des coûts d'ingénierie, · la disponibilité d'outils de mise en service et diagnostic, · la possibilité de connecter des produits de différents fabriquants. Les désavantages sont : · la nécessité de connaissances supérieures, · un investissement en équipements et accessoires supérieur, · des coûts apparemment supérieurs, · une compatibilité entre équipements de fournisseurs différents pas toujours aussi simple qu'on l'écrit. Les trois groupes intéressés sont : · Les consommateurs qui travaillent sur une installation à bus de terrain, ils ne connaissent pas forcément le ou les bus de terrain dont ils font usage. · Les intégrateurs qui, à partir du matériel disponible sur le marché, réalisent des systémes qui y ont recours. · Les producteurs ou fournisseurs de bus et de produits connectables.

24
CONCLUSION SUR IEEE 488 (généralité pour les bus de terrain)
Signaux : 16. Alimentation : propre à chaque dispositif. Bus de données 8 bits. Adresse 15 bits. Systéme d'interruption : 1 ligne. Raccordement par câble de moins de 2 métres. Gestion lente et lourde. Application instrumentation. Compatibilité électrique seulement. Les messages ne sont pas visés par la norme ni pour leur sémantique ni pour leur syntaxe. Il s'agit bien d'un bus tout à fait comparable à celui d'un ordinateur dans son fonctionnement, à la différence qu'au lieu d'un câblage de type fond de panier, les appareils sont reliés par un câble de longueur moyenne et bien sûr que ses performances en débit sont trés faibles. Autres bus de terrain: BITBUS (Intel, 1984, 2,5 M de noeuds installés) CAN (Bosh, depuis 91)
 CAN (Bosh, depuis 91)")
25
BUS EXTERNES RECENTS : USB et IEEE 1394
Origine et caractéres principaux des deux bus Un certain nombre de besoins sont identifiés depuis de nombreuses années : · Simplifier et rendre plus pratique la manipulation des connecteurs et des câbles extérieurs. · Fournir des moyens de transmission à haut débit en forme série pour éviter les connecteurs larges des voies paralléles. · Accepter des dispositifs nombreux. · Généraliser la reconnaissance automatique des dispositifs connectés. · Diminuer la consommation électrique, spécialement dans les portables. · Garantir une bande passante minimale (service isochrone) avec des protocoles robustes et multiservices. Ces bus relient des dispositifs quelconques à des ordinateurs. Leurs auteurs sont : · Pour l'USB : un groupe de sept constructeurs et éditeurs Microsoft, DEC, Compaq, IBM, Nec et Northern Telecom, mené par Intel. Les spécifications on été publiées en 1995. · Apple sous le nom de FireWire à partir de Il a été normalisé par l'IEEE en 1995 sous le nom IEEE Les spécifications ont été publiées en 1995.
 avec des protocoles robustes et multiservices. Ces bus relient des dispositifs quelconques à des ordinateurs. Leurs auteurs sont : · Pour l USB : un groupe de sept constructeurs et éditeurs Microsoft, DEC, Compaq, IBM, Nec et Northern Telecom, mené par Intel. Les spécifications on été publiées en · Apple sous le nom de FireWire à partir de Il a été normalisé par l IEEE en 1995 sous le nom IEEE Les spécifications ont été publiées en")
26
Le démarrage des deux bus a été lent
L'objectif des concepteurs de l'USB est de remplacer à plus ou moins long terme tous les ports de connexion d'un ordinateur. Aussi bien le port série que le port paralléle, les ports clavier et souris et pratiquement tous les ports des périphériques. Il est disponible sur certaines cartes méres depuis 1996 et pratiquement sur toutes depuis 1998. L'objectif des concepteurs de l'IEEE 1394 est le m₨me, avec une cible plus vaste. Il s'agit de construire la connexion des appareils du multimédia, consommateurs de trés grandes bandes passantes comme on le voit par les quelques valeurs suivantes de débits : Vidéo de haute qualité : 30 trames/s 640x480 pixels, couleur 24 bits = 221 Mbits/s Vidéo de basse qualité : 15 trames/s 320x240 pixels, couleur 16 bits = 18 Mbits/s Son de haute qualité : échantillons/s, 16 bits, 2 canaux = 1,4 Mbits/s Son de basse qualité : échantillons/s, 8 bits, 1 canal = 0,1 Mbits/s Le démarrage des deux bus a été lent Les caractéristiques communes de ces deux moyens d'entrée et sortie sont : · La gestion isochrone et asynchrone des transferts de données. · Une topologie en guirlande combinée à un multipoint en étoile pour les deux. · Une alimentation électrique incorporée pour les périphériques peu consommateurs. Les différences portent sur: Débit (12 Mo, 400 Mo), Nbre périf. (127, par segment de 1000)
, Nbre périf. (127, par segment de 1000)")
27
La situation difficile de l'utilisateur
La situation difficile de l'utilisateur. Non pas qu'elle fut en elle-m₨me une préoccupation des fabricants, mais le petit nombre de ports paralléles ou série, leurs débits faibles a été considéré comme un frein au commerce des périphériques divers. La facilité d'emploi. M₨me aprés avoir déployé les câbles de connexion et d'alimentation, il est difficile de configurer facilement un PC. L'exploitation plus large de la connexion de l'ordinateur au téléphone. La fusion de l'informatique et des télécommunications apportera beaucoup aux générations prochaines. Le bus USB Le câblage : Le câble du bus a quatre conducteurs : · un conducteur de masse, · un conducteur d'alimentation électrique. · deux conducteurs de signaux (D+ et D- ci-dessous) fonctionnant en mode différentiel pour réduire la sensibilité aux bruits externes.
 fonctionnant en mode différentiel pour réduire la sensibilité aux bruits externes.")
28
Topologie Un systéme USB a trois composants : · un hôte USB, l'ordinateur en général, son interface USB est le contrôleur, · une interconnexion USB, ensemble des connecteurs aux unités et des concentrateurs, au total 127 au plus, · des unités USB, Sa topologie est en arbre. Chaque noeud de l'arbre est un concentrateur (ou hub), chaque feuille est une unité USB. A chaque niveau cohabitent noeuds et feuilles. Chaque unité a une adresse unique. Le contrôleur a l'adresse 0. Chaque unité fournit au contrôleur une information qui la décrit, sous la forme de trois jeu de données : · Jeu standard, c'est une information commune à toutes les unités, elle contient des rubriques comme l'identification du fabricant, la classe de l'unité, la gestion de l'énergie, la configuration de l'unité, son interface etc... · Jeu de classe, la classe mentionnée est celle de l'unité, · Jeu du fabricant de l'USB, le fabricant y note librement les informations qu'il veut y voir figurer.
, chaque feuille est une unité USB. A chaque niveau cohabitent noeuds et feuilles. Chaque unité a une adresse unique. Le contrôleur a l adresse 0. Chaque unité fournit au contrôleur une information qui la décrit, sous la forme de trois jeu de données : · Jeu standard, c est une information commune à toutes les unités, elle contient des rubriques comme l identification du fabricant, la classe de l unité, la gestion de l énergie, la configuration de l unité, son interface etc... · Jeu de classe, la classe mentionnée est celle de l unité, · Jeu du fabricant de l USB, le fabricant y note librement les informations qu il veut y voir figurer.")
29
Un concentrateur ou noyau d'extension :
· a un port amont et plusieurs ports aval. Le port amont le connecte directement ou via un autre concentrateur à l'hôte. Chaque port aval le connecte soit à un terminal, soit à un concentrateur. · détecte ses connexions et déconnexions aval et gérent leur alimentation électrique. Chaque port est activé et configuré séparément à bas débit ou à haut débit. Il isole les terminaux lents des terminaux rapides. · contient deux éléments, un contrôleur et un répéteur. Le répéteur commandé par le protocole relie le port amont aux ports aval. Information sur le protocole de l'USB Il existe deux protocoles haut débit à 12Mbits/s et faible débit à 1,5 Mbits/s, pour les terminaux comme la souris ou le clavier. L'USB a un maître unique, son hôte. Une transaction ordinaire est faite au moyen de trois paquets. Le paquet jeton envoyé par l'hôte. Il contient l'adresse de l'unité contactée, le type et la direction de la transaction. Le paquet de données est envoyé par la source (émetteur). Le paquet poignée de main est émis par le puits (récepteur).
. Le paquet poignée de main est émis par le puits (récepteur).")
30
Le bus IEEE 1394 Les caractéristiques principales sont : · trois normes de débits 100, 200, 400 Mbits/s, l'extension à 1,6 Gb/s est en cours d'examen. · deux protocoles asynchrone et synchrone. Il est présenté comme un moyen peu coûteux, mais est néanmoins plus cher que l'USB. Les unités du bus sont : · Le noeud (node): appareil ou interface physique auquel on peut brancher un câble 1394. · Le noeud branché (branch node) est un appareils avec des câbles d'entrée et de sortie qui vont à deux ou plusieurs appareils voisins. Ils fonctionnent comme des répéteurs pour le trafic bi-directionnel du bus, ils peuvent également transmettre et recevoir de l'information. · Le noeud feuille (leaf nodes) est un appareil connecté par un seul noeud. C'est un périphérique d'extrémité de chaîne comme une imprimante sur un port paralléle. Ils n'ont pas la fonction de répéteur. La distance maximale entre deux noeuds feuilles est de 16 câbles soit 72 métres.
: appareil ou interface physique auquel on peut brancher un câble · Le noeud branché (branch node) est un appareils avec des câbles d entrée et de sortie qui vont à deux ou plusieurs appareils voisins. Ils fonctionnent comme des répéteurs pour le trafic bi-directionnel du bus, ils peuvent également transmettre et recevoir de l information. · Le noeud feuille (leaf nodes) est un appareil connecté par un seul noeud. C est un périphérique d extrémité de chaîne comme une imprimante sur un port paralléle. Ils n ont pas la fonction de répéteur. La distance maximale entre deux noeuds feuilles est de 16 câbles soit 72 métres.")
31
Bus internes de microordinateurs (relativement) récents EISA et MCA
Au début des années 80 IBM lance le PC, avec un bus interne appelé bus ISA (Industry Standard Architecture), le succés du PC a entrainé celui du bus ISA. Au vu des pbs rencontrés par le bus ISA, notament pas de protection. IBM lance le bus MCA, fortement protégé (plus de 10 brvets!!!) mais emp₨che son développement. A contratrio un ensemble de grand de 'linformatique lance le bus EISA, libre de droit, mais qui garde son ascendance avec son illustre prédececeur, et notament sa fréquence. Ces bus n'existe plus (enfin presque plus) laissant place à de nouveaux bus bus locaux, PCI, AGP et circuits associés Une machine de bureau peut avoir aujourd'hui une demi douzaine de bus. BUS LOCAUX Ils sont apparus en grand nombre à partir de Ils veulent pallier le débit faible des bus classiques vis-à-vis des performances grandissantes d'autres composants.
, le succés du PC a entrainé celui du bus ISA. Au vu des pbs rencontrés par le bus ISA, notament pas de protection. IBM lance le bus MCA, fortement protégé (plus de 10 brvets!!!) mais emp₨che son développement. A contratrio un ensemble de grand de linformatique lance le bus EISA, libre de droit, mais qui garde son ascendance avec son illustre prédececeur, et notament sa fréquence. Ces bus n existe plus (enfin presque plus) laissant place à de nouveaux bus. bus locaux, PCI, AGP et circuits associés. Une machine de bureau peut avoir aujourd hui une demi douzaine de bus. BUS LOCAUX. Ils sont apparus en grand nombre à partir de Ils veulent pallier le débit faible des bus classiques vis-à-vis des performances grandissantes d autres composants.")
32
VESA pour Video Electronics Standard Association a été con₤u pour connecter la vidéo aux Intel Il était placé entre le couple processeur mémoire. BUS PCI (Peripheral Computer Interface) C'est un bus local con₤u par Intel mis sur le marché en 1992 et normalisé en Il n'est pas réservé à ces processeurs et équipe plusieurs machines à base de PowerPC. Il relie les périphériques internes : carte vidéo, carte réseau, contrôleur de disque dur, etc. Ses caractéristiques varient selon les versions : · Il est synchrone mais pourrait fonctionner en mode asynchrone selon ses circuits de commande. · La fréquence d'horloge va de 0 à 33 Mhz ou de 0 à 66Mhz. · La bande passante maximale théorique est de 132 Mo/s pour 32bitsx33Mhz et 528 Mo/s pour · Il est indépendant du microprocesseur.
 C est un bus local con₤u par Intel mis sur le marché en 1992 et normalisé en Il n est pas réservé à ces processeurs et équipe plusieurs machines à base de PowerPC. Il relie les périphériques internes : carte vidéo, carte réseau, contrôleur de disque dur, etc. Ses caractéristiques varient selon les versions : · Il est synchrone mais pourrait fonctionner en mode asynchrone selon ses circuits de commande. · La fréquence d horloge va de 0 à 33 Mhz ou de 0 à 66Mhz. · La bande passante maximale théorique est de 132 Mo/s pour 32bitsx33Mhz et 528 Mo/s pour. · Il est indépendant du microprocesseur.")
33
Le duo formé par le BUS DU PROCESSEUR et le PCI a rendu EISA obsoléte
Le duo formé par le BUS DU PROCESSEUR et le PCI a rendu EISA obsoléte. Un ISA est alors largement suffisant pour les périphériques lents. Bus AGP Le bus AGP pour Advanced Graphic Port a été défini par Intel. Il est fait pour les cartes graphiques. Il fonctionne à 66MHz. Il banalise la mémoire centrale qui peut ₨tre utilisée directement par la carte graphique.

34
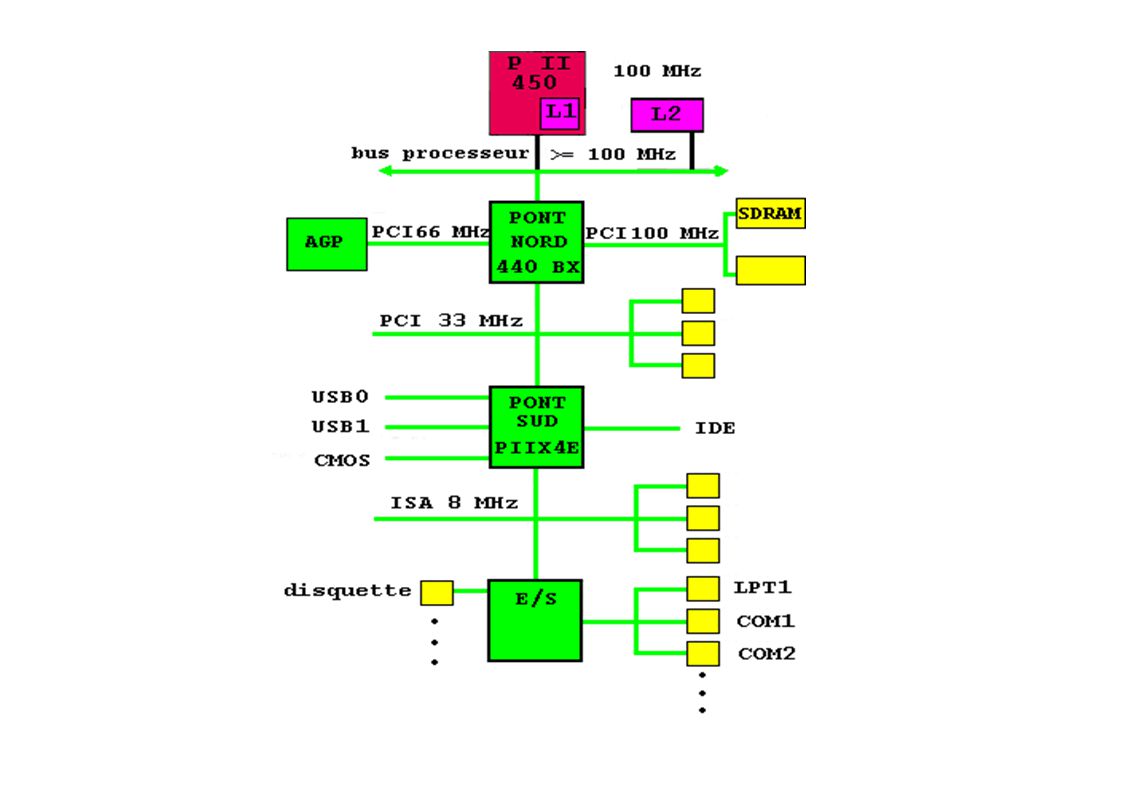
Les circuits de gestion des bus (chipset)
Jusqu'en 1986, chaque contrôleur de circuit était constitué d'une puce dans les PC (11 par machine). En 1986, la société Chips & Technologies,réduit le nombre de circuit à 5 au lieu de 9 à 11. De nos jours plus qu'un seul (440HX, 440BX, ....) ces derniers sont en 2 parties: Le Nord est interface entre le processeur et la carte-mére. Il commande la mémoire centrale et le cache externe. Il est interface entre le bus principal, à 66 ou 100Mhz et le bus d'extension AGP. Il fonctionne à la fréquence du bus du processeur. Le Sud est à une fréquence plus basse. Il est interface entre le bus ISA ou EISA et le PCI ainsi que les connecteurs d'entrées et sorties comme les prises série, paralléles, les bus externes comme USB, les contrôleurs EIDE et de lecteurs de disquettes. Il prend aussi en charge l'horloge du systéme, les contrôleurs d'interruption et le canal d'accés direct à la mémoire. Cette séparation a un motif d'économie, un m₨me boîtier Sud est utilisable avec des boîtiers Nord différents qui suivent au plus prés la fréquence du bus processeur. Le numéro que l'on donne est celui du composant Nord. Comme on le voit dans l'exemple suivant.
. En 1986, la société Chips & Technologies,réduit le nombre de circuit à 5 au lieu de 9 à 11. De nos jours plus qu un seul (440HX, 440BX, ....) ces derniers sont en 2 parties: Le Nord est interface entre le processeur et la carte-mére. Il commande la mémoire centrale et le cache externe. Il est interface entre le bus principal, à 66 ou 100Mhz et le bus d extension AGP. Il fonctionne à la fréquence du bus du processeur. Le Sud est à une fréquence plus basse. Il est interface entre le bus ISA ou EISA et le PCI ainsi que les connecteurs d entrées et sorties comme les prises série, paralléles, les bus externes comme USB, les contrôleurs EIDE et de lecteurs de disquettes. Il prend aussi en charge l horloge du systéme, les contrôleurs d interruption et le canal d accés direct à la mémoire. Cette séparation a un motif d économie, un m₨me boîtier Sud est utilisable avec des boîtiers Nord différents qui suivent au plus prés la fréquence du bus processeur. Le numéro que l on donne est celui du composant Nord. Comme on le voit dans l exemple suivant.")
Présentations similaires




















>")
