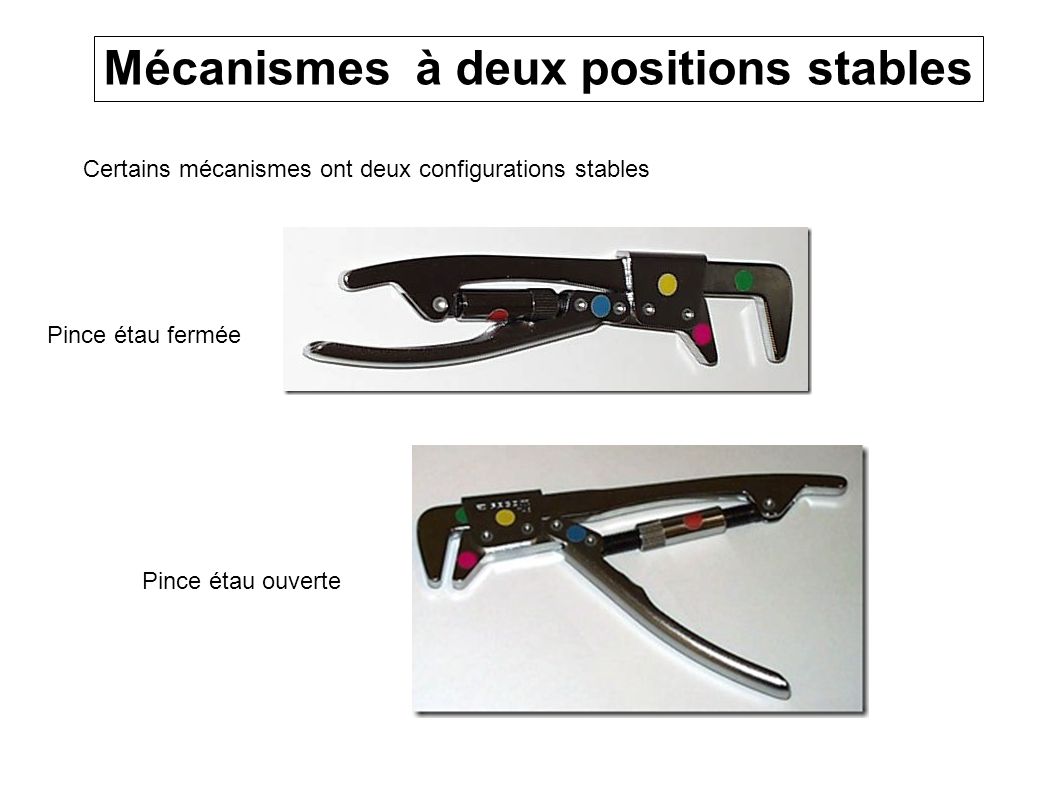
Certains mécanismes ont deux configurations stables Pince étau ouverte Pince étau fermée Mécanismes à deux positions stables
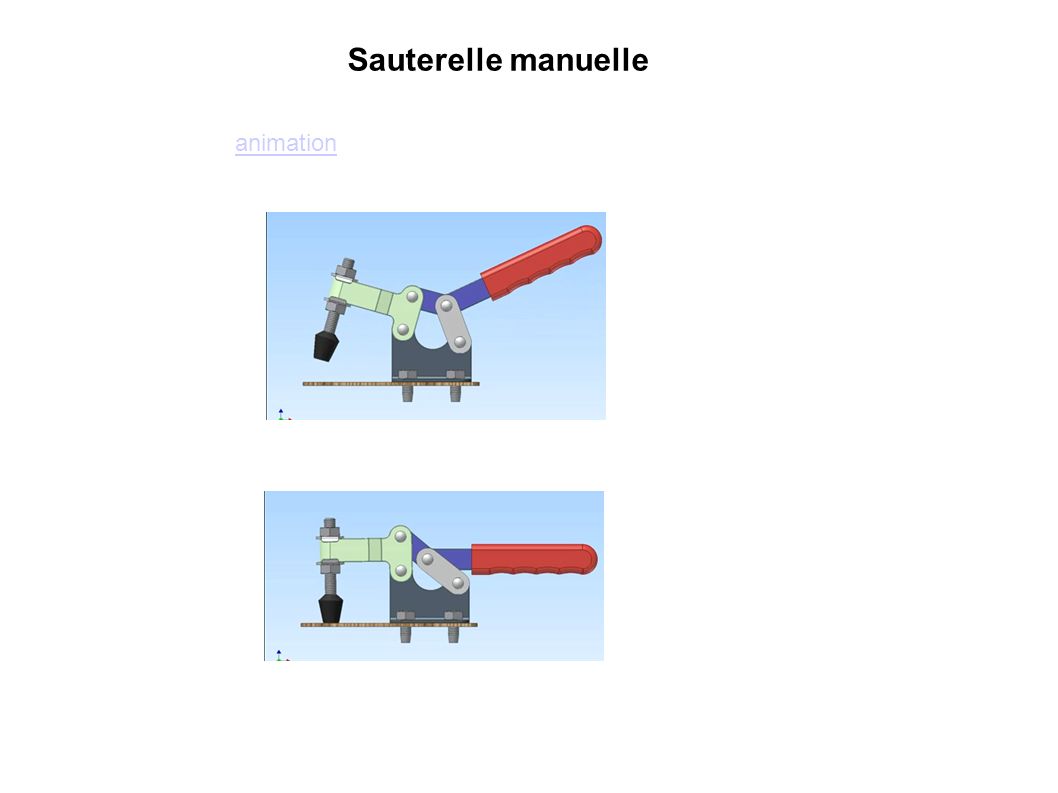
animation Sauterelle manuelle
Sauterelle avec vérin pneumatique
Levier 1 verrouillé. Position repos Sauterelle manuelle
P123 levier 1 tourne autour de A. 2 plans inclinés aa=> 2 positions stables. Position instable sur la tranche (A, tranche, ressort alignés) P123 levier 1 tourne autour de A. 2 plans inclinés aa=> 2 positions stables. Position instable sur la tranche (A, tranche, ressort alignés)
P238 2 positions stables, passage d’une position à l’autre quand les 3 points sont alignés Interrupteur
Serrure fermée Serrure ouverte L’élément 4 tire sur le manche 1 quand on appuie sur le manche 1 On a dépassé la config où les 3 points sont alignés
Presse à main avec genouillère
Gourde
Presse à injecter Moule ouvert VerrouillageMoule encours de fermeture
Dans cette position la bride est presque en contact avec la pièce à brider, car le piston plongeur va encore avancer un peu … Maintenant les trois points E,D et C sont alignés et le piston plongeur est en fin de course, on dit qu’il est au point mort gauche. C’est dans cette position que le serrage est maxi (principe de la genouillère) Fonctionnement de la sauterelle pneumatique (d’après le site internet )site internet
Le piston du vérin pneumatique a avancé encore un petit peu, et nous avons atteint une situation particulière. Le piston plongeur est un tout petit peu revenu aussi, mais maintenant, il y a verrouillage, car celui-ci quelque soit l’effort ne peut plus revenir en arrière, car la biellette rouge va s’appuyer sur socle. J’ai volontairement accentué la cassure du point D en dessous de la ligne médiane EC, Verrouillage
13 L F L=1m S=10 cm 2 E=10 11 Pa F/2 1 2 Par symétrie Etude théorique
14 Hypothèse non linéaire On écrit l’équilibre sur la configuration déformée (inconnue) l L d 1 Amont Aval 2 Voir la suite de la démonstration dans le cours de calcul des structures (partie calcul non linéaire)
15 A 0,2 0,4 B Partie linéaire Instabilité Si F augmente graduellement, on passe brutalement de A à B (flambage) F<0 Il faut retenir la barre pour la maintenir en équilibre
16 L F Verrouillage Position initiale Butée
17 Position verrouillée
L F 1 (donné) 3 2 F 4 ? Etude Statique 1 F1F1 F2F2 F 3 =F 2 En isolant les 2 barres inclinées :
L F 1 (donné) 3 2 F 4 ? 1 En isolant le coulisseau et en utilisant le principe des actions réciproques : F4F4
L 3 2 Etude cinématique 1 V 1 (donné) V4?V4? Principe de l’équiprojectivité :
L V 1 (donné) V4?V4? Principe des travaux virtuels Le principe des travaux virtuels est vérifié