La droite dans R2 Montage préparé par : André Ross Professeur de mathématiques Cégep de Lévis-Lauzon
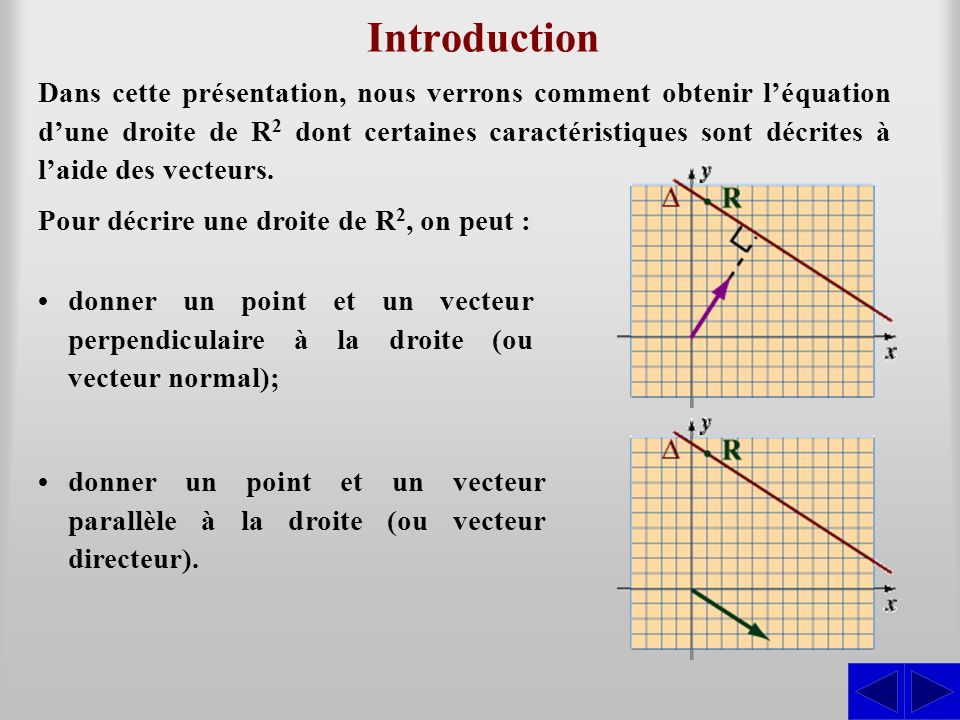
Introduction Dans cette présentation, nous verrons comment obtenir l’équation d’une droite de R2 dont certaines caractéristiques sont décrites à l’aide des vecteurs. Pour décrire une droite de R2, on peut : • donner un point et un vecteur perpendiculaire à la droite (ou vecteur normal); • donner un point et un vecteur parallèle à la droite (ou vecteur directeur).
Vecteur normal Définition Vecteur normal Un vecteur normal à une droite de R2 est un vecteur perpen-diculaire à cette droite. Nous le notons N. Comme nous l’avons fait précédemment, nous emploierons parfois la lettre grecque ∆ (delta) pour désigner une droite. Rappelons que, pour trouver l’équation d’une droite, on doit décrire la condition à laquelle doit satisfaire un point pour être sur cette droite. Dans les situations que nous allons présenter, cette condition s’exprime à l’aide des vecteurs.
Équation d’une droite de R2 Un point et un vecteur normal sont donnés Considérons une droite dont on connaît un point R(x1; y1) et un vecteur normal N = (a; b). Pour qu’un point P(x ; y) soit sur cette droite, il faut que le vecteur RP soit perpendiculaire au vecteur N. On doit donc avoir : N • RP = (a ; b) • (x – x1; y – y1) = 0, d’où : ax + by – ax1 – by1 = 0. Dans cette équation, –ax1 – by1 est une constante que l’on désigne par c. On a donc une équation de la forme : ax + by + c = 0 Réciproquement, on peut prouver que ax + by + c = 0 est l’équation d’une droite perpendiculaire au vecteur N = (a; b).
Équation cartésienne d’une droite de R2 Définition Équation cartésienne d’une droite de R2 Soit R(x1; y1), un point d’une droite ∆, et N = (a; b), un vecteur normal à cette droite. On appelle équation cartésienne de la droite l’équation : ax + by + c = 0, où c = –ax1 – by1. Remarque : Dans l’équation cartésienne de la droite, les coefficients des variables représentent un vecteur normal à la droite.
Équation cartésienne d’une droite de R2 Procédure pour trouver l’équation cartésienne d’une droite de R2 dont un point et un vecteur normal sont connus 1. Soit R, le point, et N, le vecteur normal. Construire le vecteur allant du point R à un point P quelconque de coordonnées (x; y). 2. Effectuer le produit scalaire des vecteurs N et RP. 3. Faire égaler le produit à 0 et regrouper les constantes.
Exemple 10.1.1 Trouver une équation cartésienne de la droite passant par le point R(4; 5) et perpendiculaire au vecteur N = (2; 1). Soit P(x ; y), un point quelconque de R2. Le vecteur RP est alors : RP = (x – 4; y – 5) Pour que P soit sur cette droite, il faut que le vecteur RP soit perpendiculaire au vecteur N. Leur produit scalaire doit donc être nul. N • RP = (2; 1) • (x – 4; y – 5) = 0 S 2x – 8 + y – 5 = 0 2x + y – 13 = 0 L’équation cartésienne est donc : 2x + y – 13 = 0
Exercice Trouver une équation cartésienne de la droite passant par le point R(6; 3) et perpendiculaire au vecteur N = (1; 3). Soit P(x ; y), un point quelconque de R2. Le vecteur RP est alors : RP = (x – 6; y – 3) Pour que P soit sur cette droite, il faut que le vecteur RP soit perpendiculaire au vecteur N. Leur produit scalaire doit donc être nul. N • RP = (1; 3) • (x – 6; y – 3) = 0 S x – 6 + 3y – 9 = 0 x + 3y – 15 = 0 L’équation cartésienne est donc : x + 3y – 15 = 0
Vecteur directeur Définition Vecteur directeur Un vecteur directeur est un vecteur parallèle à un lieu géométrique, à une droite ou à un plan. Nous le noterons D. En donnant un point et un vecteur directeur, on détermine complètement une droite. On peut donc en trouver une équation en utilisant cette information. Il y a différentes formes sous lesquelles on peut décrire symbo-liquement une droite dont on connaît un point et un vecteur directeur. On peut en donner une équation vectorielle, une descrip-tion paramétrique ou une équation symétrique.
OX = OP + t D, où t est un nombre réel. Vecteur position Rappelons qu’un repère d’une droite est constitué d’un point de celle-ci et d’un vecteur directeur. À partir d’un point fixe considéré comme origine, on peut décrire chaque point de la droite par un vecteur position. En considérant que le domaine de variation du paramètre est R, on obtient alors une équation vectorielle de la droite, soit : OX = OP + t D, où t est un nombre réel. Remarque : Dans R2, les vecteurs OX, OP et D s’expriment en fonction de la base. On utilisera la base orthonormée usuelle.
Équations paramétriques d’une droite de R2 Un point et un vecteur directeur sont donnés Considérons une droite dont on connaît un point R(x1; y1) et un vecteur directeur D = (a; b). Soit un point P(x; y) de cette droite, alors : OP = OR + RP , d’où : OP = OR + t D, où t est un nombre réel. Cela donne l’équation vectorielle : (x; y) = (x1; y1) + t (a; b) = (x1 + a t; y1 + b t) , où t est un nombre réel. L’égalité des vecteurs donne la description paramétrique de la droite : x = x1 + a t y = y1 + b t ∆ : , où t est un nombre réel. Remarque : Dans une description paramétrique de la droite, les coefficients du paramètre donnent un vecteur directeur de la droite et les constantes donnent un point de la droite.
Équations vectorielle et paramétriques Définition Équation vectorielle et équations paramétriques Soit R(x1; y1), un point d’une droite, et D = (a; b), un vecteur directeur de cette droite. On appelle équation vectorielle de la droite l’équation : OP = OR + t D, où t est un nombre réel. En exprimant les vecteurs dans la base usuelle de R2, cela donne : (x; y) = (x1; y1) + t (a; b) = (x1 + a t; y1 + b t) , où t est un nombre réel. On appelle équations paramétriques de la droite les équations : x = x1 + a t y = y1 + b t ∆ : , où t est un nombre réel.
(x; y) = (3; 2) + t (–1; 3) = (3 – t; 2 + 3t) Exemple 10.1.2 Trouver les équations paramétriques, puis une équation cartésienne de la droite passant par le point R(3; 2) et parallèle au vecteur D = (–1; 3). Soit P(x ; y), un point quelconque de R2. Ce point est sur la droite si le vecteur RP est parallèle au vecteur directeur. C’est à dire s’il existe un scalaire t tel que : Pour trouver une équation cartésienne à partir des équations paramétriques, il faut éliminer le paramètre. Pour ce faire, isolons t dans chacune des équations. On trouve alors : x – 3 –1 y – 2 3 t = OP = OR + t D et t = En considérant les vecteurs algébriques dans la base usuelle, on a : D’où : x – 3 –1 y – 2 3 = S S (x; y) = (3; 2) + t (–1; 3) = (3 – t; 2 + 3t) Cela donne : 3x – 9 = –y + 2 Les équations paramétriques sont alors : Et on obtient l’équation cartésienne : x = 3 – t y = 2 + 3 t ∆ : , où t est un nombre réel. 3x + y – 11 = 0
(x; y) = (4; 2) + t (3; –2) = (4 + 3 t; 2 – 2t) Exercice Trouver les équations paramétriques, puis une équation cartésienne de la droite passant par le point R(4; 2) et parallèle au vecteur D = (3; –2). Soit P(x ; y), un point quelconque de R2. Ce point est sur la droite si le vecteur RP est parallèle au vecteur directeur. C’est à dire s’il existe un scalaire t tel que : Pour trouver une équation cartésienne à partir des équations paramétriques, il faut éliminer le paramètre. Pour ce faire, isolons t dans chacune des équations. On trouve alors : x – 4 3 y – 2 –2 t = OP = OR + t D et t = En considérant les vecteurs algébriques dans la base usuelle, on a : x – 4 3 y – 2 –2 = D’où : S S (x; y) = (4; 2) + t (3; –2) = (4 + 3 t; 2 – 2t) Cela donne : –2x + 8 = 3y – 6 Les équations paramétriques sont alors : Et on obtient l’équation cartésienne : –2x – 3y + 14 = 0 En multipliant les deux membres de l’équation par –1, on a : x = 4 + 3t y = 2 – 2t ∆ : , où t est un nombre réel. 2x + 3y – 14 = 0
Équation symétrique d’une droite de R2 Définition Équation symétrique Soit R(x1; y1), un point d’une droite, et D = (a; b), un vecteur directeur de cette droite. L’équation symétrique de la droite est : x – x1 a y – y1 b = , si a ≠ 0 et b ≠ 0. Remarque : Dans une équation symétrique de la droite, les dénominateurs donnent un vecteur directeur de la droite et les constantes donnent un point de la droite.
Positions relatives de droites dans R2 Droites parallèles Caractéristiques des droites parallèles Les vecteurs normaux sont parallèles : $ k Î R tel que N1 = k N2 Les vecteurs directeurs sont parallèles : $ k Î R tel que D1 = k D2 Le vecteur normal de l’une des droites est perpendiculaire au vecteur directeur de l’autre droite : D1 • N2 = 0 et N1 • D2 = 0
Positions relatives de droites dans R2 Droites parallèles Caractéristiques des droites parallèles distinctes Lorsqu’un point R(x1; y1) est sur l’une des droites, il ne peut être sur l’autre droite : si R Î ∆1, alors R Ï ∆2 Il n’y a aucun point d’intersection. Caractéristiques des droites parallèles confondues Lorsqu’un point R(x1; y1) est sur l’une des droites, il est sur l’autre droite : si R Î ∆1, alors R Î ∆2 Il y a une infinité de points d’intersection.
Positions relatives de droites dans R2 Droites concourantes Caractéristiques des droites concourantes Les droites ne sont pas parallèles. Les vecteurs normaux sont non colinéaires : " k Î R\{0}, N1 ≠ k N2 Les vecteurs directeurs sont non colinéaires : " k Î R\{0}, D1 ≠ k D2 Le vecteur normal de l’une des droites n’est pas perpendiculaire au vecteur directeur de l’autre droite : N1 • D2 ≠ 0 et D1 • N2 ≠ 0 Il y a un seul point d’intersection.
Exemple 10.1.4 Déterminer la position relative des droites ∆1 et ∆2, où : x = 2 + 3t y = 4 + 2t S S ∆1 : 2x – 3y + 16 = 0 et ∆2 : Trouver le point d’intersection, le cas échéant. Pour déterminer si les droites sont distinctes ou confondues, il suffit de considérer un point quelconque de l’une des droites et de vérifier s’il est sur l’autre droite. Les coefficients des variables dans l’équation cartésienne donnent un vecteur normal N1 = (2; –3). Les dénominateurs dans les équations paramétriques donnent un vecteur directeur En posant, par exemple, x = 1 dans l’équation de ∆1, on obtient 2 – 3y + 16 = 0, d’où –3y = –18 et y = 6. Le point P1(1; 6) est donc un point de ∆1. D2 = (3; 2). Le produit scalaire donne : N1 • D2 = (2; –3) • (3; 2) = 6 – 6 = 0. En substituant les coordonnées de ce point dans les équations de la droite ∆2, on obtient : Par conséquent, les vecteurs sont perpendiculaires et les droites sont parallèles. 1 = 2 + 3t, d’où : t = –1/3 6 = 4 + 2t, d’où : t = 1 Ces égalités contradictoires indiquent que le point (1; 6) n’est pas sur la droite ∆2. Les droites sont donc parallèles distinctes.
Exercice Déterminer la position relative des droites ∆1 et ∆2, où : x = –3 + 3t y = 12 – 4t S S ∆1 : 4x + 3y – 24 = 0 et ∆2 : Trouver le point d’intersection, le cas échéant. Pour déterminer si les droites sont distinctes ou confondues, il suffit de considérer un point quelconque de l’une des droites et de vérifier s’il est sur l’autre droite. Les coefficients des variables dans l’équation cartésienne donnent un vecteur normal N1 = (4; 3). Les dénominateurs dans les équations paramétriques donnent un vecteur directeur En posant, par exemple, x = 3 dans l’équation de ∆1, on obtient 12 + 3y – 24 = 0, d’où 3y = 12 et y = 4. Le point P1(3; 4) est donc un point de ∆1. D2 = (3; –4). Le produit scalaire donne : N1 • D2 = (4; 3) • (3; –4) = 12 – 12 = 0. En substituant les coordonnées de ce point dans l’équation de la droite ∆2, on obtient : Par conséquent, les vecteurs sont perpendiculaires et les droites sont parallèles. 3 = –3 + 3t, d’où : t = 2 4 = 12 – 4t, d’où : t = 2 Ces égalités indiquent que le point (3; 4) est sur la droite ∆2. Par conséquent, les droites sont parallèles confondues.
Exemple 10.1.5 Déterminer la position relative des droites ∆1 et ∆2, où : x = 7 + 5t y = 1 + 4t S S ∆1 : 4x – y – 11 = 0 et ∆2 : Pour déterminer le point de rencontre des droites, on peut substituer les équations paramétriques dans l’équation cartésienne et calculer la valeur du paramètre au point d’intersection. Cela donne : Trouver le point d’intersection, le cas échéant. Les coefficients des variables dans l’équation cartésienne donnent un vecteur normal N1 = (4; –1). 4(7 + 5t) – (1 + 4t) – 11 = 0 28 + 20t – 1 – 4t – 11 = 0 16t + 16 = 0 t = –1 Les coefficients du paramètre dans les équations paramétriques donnent un vecteur directeur D2 = (5; 4). Le produit scalaire donne : N1 • D2 = (4; –1) • (5; 4) = 20 – 4 = 16 ≠ 0. En substituant dans les équations paramétriques, on trouve : Par conséquent, les vecteurs ne sont pas perpendiculaires et les droites sont concourantes. x = 7 + 5 ´ (–1) = 2 y = 1 + 4 ´ (–1) = –3 Le point de rencontre des deux droites est donc (2; –3).
Exercice Déterminer la position relative des droites ∆1 et ∆2, où : x = 9 + 2t y = 3 + 3t S S ∆1 : 7x + 3y – 26 = 0 et ∆2 : Trouver le point d’intersection, le cas échéant. Pour déterminer le point de rencontre des droites, on peut substituer les équations paramétriques dans l’équation cartésienne et calculer la valeur du paramètre au point d’intersection. Cela donne : Les coefficients des variables dans l’équation cartésienne donnent un vecteur normal N1 = (7; 3). 7(9 + 2t) + 3(3 + 3t) – 26 = 0 63 + 14t + 9 + 9t – 26 = 0 23t + 46 = 0 t = –2 Les coefficients du paramètre dans les équations paramétriques donnent un vecteur directeur D2 = (2; 3). Le produit scalaire donne : N1 • D2 = (7; 3) • (2; 3) = 14 + 9 = 23 ≠ 0. En substituant dans les équations paramétriques, on trouve : Par conséquent, les vecteurs ne sont pas perpendiculaires et les droites sont concourantes. x = 9 + 2 ´ (–2) = 5 y = 3 + 3 ´ (–2) = –3 Le point de rencontre des deux droites est donc (5; –3).
Conclusion On peut caractériser une droite de R2 en donnant un point de celle-ci et en définissant son orientation , soit par un vecteur normal ou par un vecteur directeur. Ces informations sont suffisantes pour déterminer une équation de la droite. À partir de l’équation d’une droite, on peut déterminer soit un vecteur normal, soit un vecteur directeur. En comparant les vecteurs décrivant l’orientation de deux droites, on peut savoir si celles-ci sont parallèles ou concourantes. Lorsque les droites sont parallèles et qu’elle n’ont pas de point commun, elles sont parallèles distinctes. Si elles ont un point commun, elles sont confondues.
Lecture Algèbre linéaire et géométrie vectorielle, applications en sciences de la nature. Section 10.1, p.283-289. Algèbre linéaire et géométrie vectorielle, applications en sciences humaines. Section 9.1, p.219-225. Exercices Algèbre linéaire et géométrie vectorielle avec applications en sciences de la nature. Section 10.2, p. 290-291. Algèbre linéaire et géométrie vectorielle, applications en sciences humaines. Section 9.2, p.226-227.