Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Un algorithme de prédiction de lheure darrivée de bus utilisant un système de localisation automatique

2
Le but Prédire en temps réel l heure d arrivée du véhicule pendant son parcours.

3
Les contraintes Le flux de données peut être discontinu. L incertitude doit être estimée.

4
Principe général Repérage du véhicule Estimation du temps de parcours restant

5
Lalgorithme

6
Outil de reperage =U =y =x

7
Equations

8
Solution de Kalman En labsence de données mesurées

9
Solution de Kalman Lors de l'arrivée de données

10
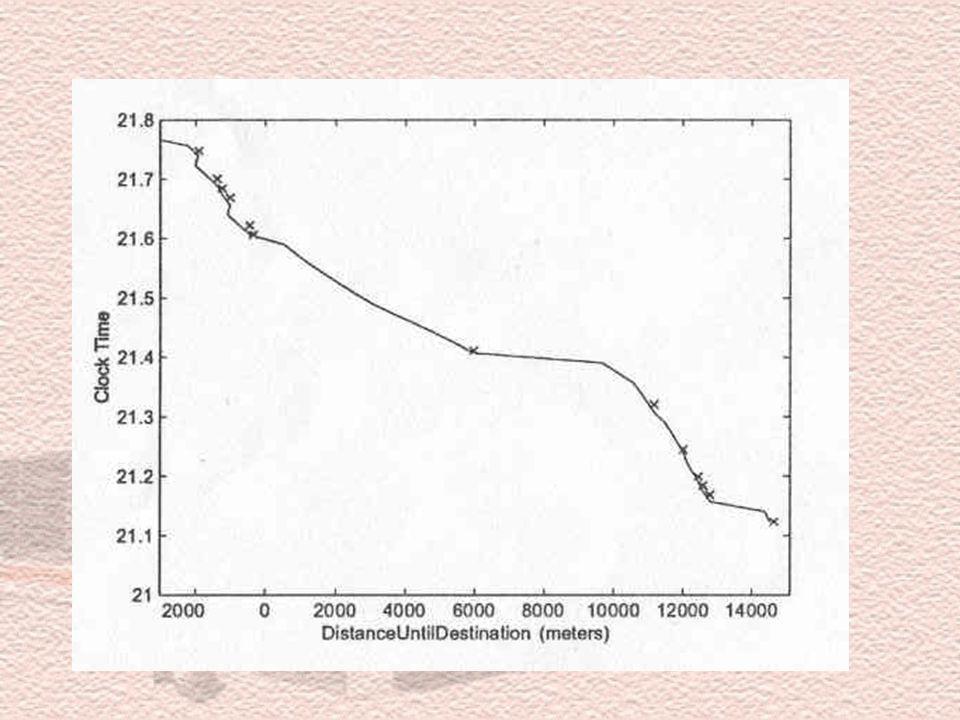
Outil de prédiction Associer un temps restant à chaque position

11
Utilisation de données historiques

12
Traitement statistique On définit en chaque point une variable aléatoire représentant le temps restant. Chacune de ces variables a une répartition gaussienne. On calcule le temps restant avec la fonction obtenueOn calcule le temps restant avec la fonction obtenue

13
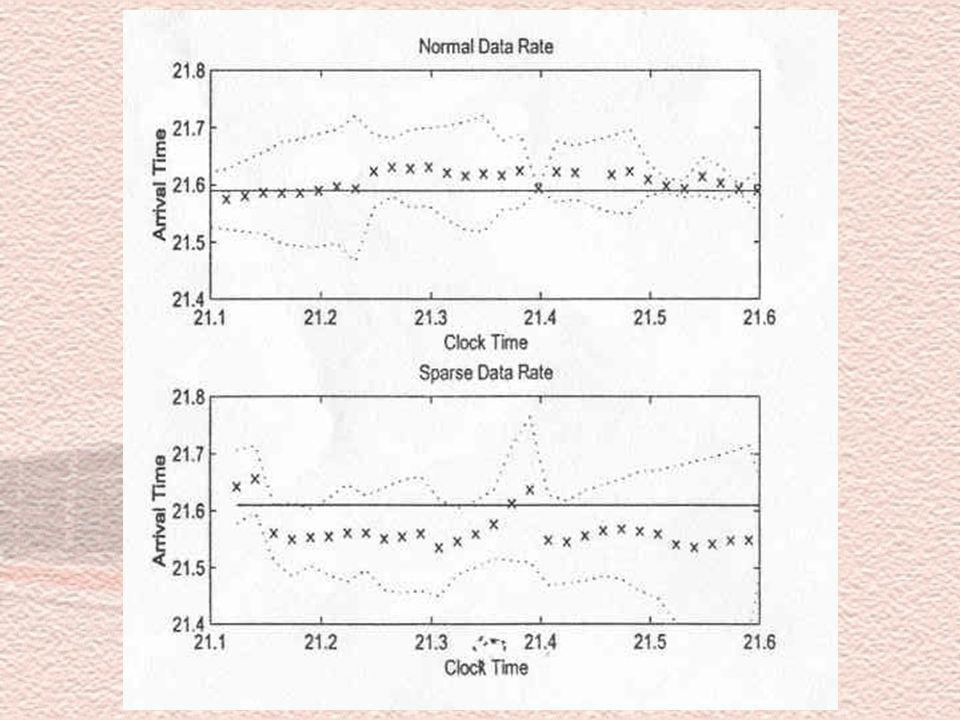
Tests de performance

17
Les erreurs à 15mn

18
Conclusion Une application à Seattle: mybus.org http://mybus.org

19
Le filtre de Kalman

20
Principe Estimer l'état dune variable gouvernée par une équation du type: A laide dune valeur mesurée du type: w et v sont les parties aléatoires de distribution gaussienne

21
Resultat: Lalgorithme de Kalman fournit une estimation de x optimale au sens des moindres carrés.

22
Pour en savoir plus sur les filtres de Kalman http://www.cs.unc.edu/~welch/kalman/kalman_filt er/kalman.html http://www.navtechgps.com/seminars/sem411.asp http://www.cs.rochester.edu/users/faculty/dana/ind ex.html http://www.hepl.harvard.edu/~rlee/minos/kalman/

Présentations similaires


 r =>")


 Combiner des apprenants: le boosting.>")


 et filtrage de kalman>")











