Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Automatique: les systèmes du 1er et 2nd ordre
I. Système du 1er ordre: 1.1 Définition 1.2 Exemples 1.3 Etude temporelle Réponse à un échelon Réponse à une rampe II. Système du 2nd ordre: 2.1 Définition 2.2 Exemples 2.3 Etude temporelle : Réponse à un échelon III. Identification d’un système à partir de sa réponse indicielle

2
Système du premier ordre
Un système physique est du 1er ordre, s’il est régi par une équation différentielle du 1er ordre à coefficients constants : Si les conditions initiales sont nulles , la fonction de transfert dans le domaine de Laplace s’écrit : Soit sous forme canonique : K est le gain du système est la constante de temps

3
Exemple d’un système du 1er ordre : solide en rotation

4
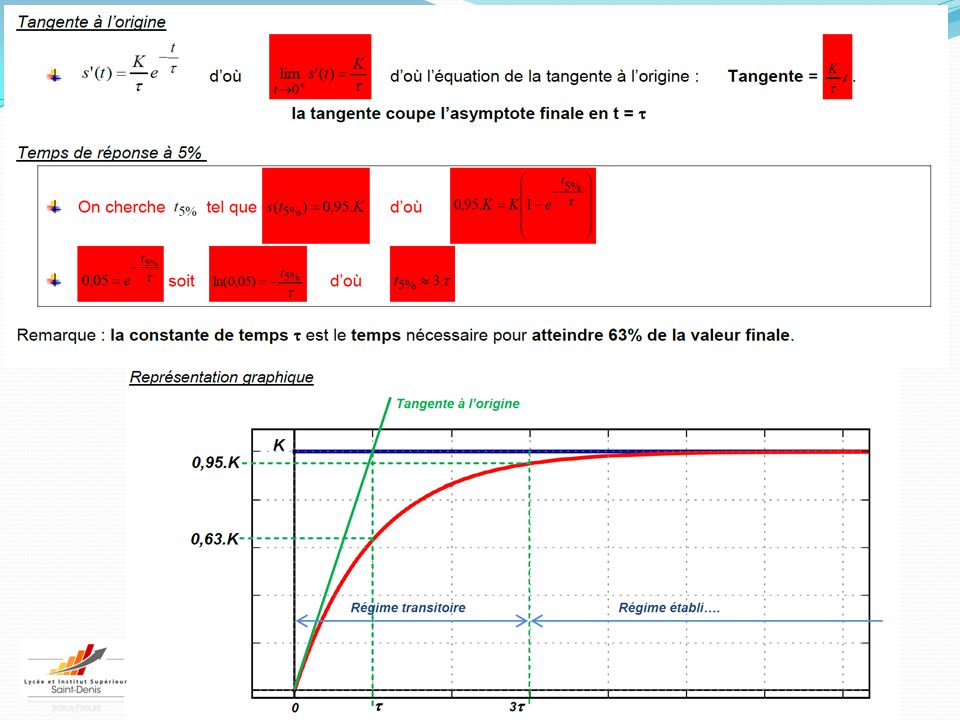
Etude temporelle Réponse à un échelon unitaire – réponse indicielle

7
Etude temporelle Réponse à un échelon unitaire – réponse indicielle

8
Etude temporelle Réponse à une rampe
Valeurs limites : Tangente à l’origine :

9
Etude temporelle Réponse à une rampe

10
Etude temporelle Réponse à une rampe

11
Système du second ordre
Un système physique est du 2nd ordre, s’il est régi par une équation différentielle du 2nd ordre à coefficients constants : Si les conditions initiales sont nulles , la fonction de transfert dans le domaine de Laplace s’écrit : Soit sous forme canonique :

12
Exemple d’un système du 2nd ordre : suspension

13
Etude temporelle Réponse à un échelon unitaire – réponse indicielle
Valeurs limites La décomposition de S(p) dépend des racines de l'équation caractéristique :
 dépend des racines de l équation caractéristique :")
14
Etude temporelle Réponse à un échelon unitaire – réponse indicielle
Cas où z>1 : régime apériodique Cas où z=1 : régime apériodique critique Cas où z<1 : régime oscillatoire

15
Cas où z>1 : régime apériodique

16
Cas où z>1 : régime apériodique
La réponse indicielle d'un système du 2nd ordre caractérisé par z > 1 est comparable à celle d'un 1er ordre mise à part la tangente horizontale à l'origine.

17
Cas où z=1 : régime apériodique critique

18
Cas où z+1 : régime apériodique critique
On retrouve le même type de réponse que précédemment : toujours pas de dépassement ; le système présente un meilleur temps de réponse.

19
Cas où z<1 : régime oscillatoire

20
Cas où z<1 : régime oscillatoire
On pose cos=z et sin=

21
z << 1 : réponse oscillante, temps de réponse à 5% grand.
z = 0,7 : dépassement faible, pas d'oscillations, temps de réponse à 5% le plus faible. z = 1 : réponse sans dépassement le plus rapide. z > 1 : réponse très amortie, sans dépassement, temps de réponse à 5% grand.

22
Cas où z<1 : régime oscillatoire
Recherche de la précision statique s(t) : La précision statique est définie par Pour calculer cette limite on peut passer dans le domaine symbolique de Laplace et utiliser le théorème de la valeur finale : On a donc seulement si De la même manière qu’un système du premier ordre, un second ordre ne possède pas d’erreur de position si son gain statique est égal à 1.
 : La précision statique est définie par. Pour calculer cette limite on peut passer dans le domaine symbolique de Laplace et utiliser le théorème de la valeur finale : On a donc seulement si. De la même manière qu’un système du premier ordre, un second ordre ne possède pas d’erreur de position si son gain statique est égal à 1.")
23
Cas où z<1 : régime oscillatoire
Rapidité la meilleure performance est obtenue pour une valeur de z environ égale à 0.7.

24
Cas où z<1 : régime oscillatoire
. Dépassements en régime transitoire : Les dépassements ont lieu lorsque

25
Cas où z<1 : régime oscillatoire
. Cette dérivée s’annule lorsque : : c’est le régime établi : c’est la tangente à l’origine de la courbe (propriété importante des systèmes du 2nd ordre) ce qui nous donne les différentes dates des dépassements d’où la date du premier maximum est la date du premier minimum relatif est la date du deuxième maximum est
 ce qui nous donne les différentes dates des dépassements. d’où. la date du premier maximum est. la date du premier minimum relatif est. la date du deuxième maximum est.")
26
Cas où z<1 : régime oscillatoire
Calcul de la valeur des Di La valeur des dépassements relatifs vaut =

27
Identification d'un système a partir de sa réponse indicielle
Dans la pratique, on se limite à l'identification des systèmes du 1er et du 2nd ordre. Identifier un système c'est déterminer ses paramètres caractéristiques : K et τ pour un système du 1er ordre; K, z et 0 pour un système du 2nd ordre. Tangente à l'origine ≠ 0 ⇒ Système du 1er ordre. Asymptote finale ⇒ Gain statique K. Pente à l'origine (K/ τ) ou temps pour atteindre 0,63 K (τ) ou temps pour atteindre 0,95 K (3τ) ⇒ Constante de temps τ. Tangente à l'origine = 0 ⇒ Système du 2nd ordre. Pas de dépassement ⇒ z > 1. Si dépassement ⇒ z < 1 et déterminé à partir de l'amplitude du premier dépassement. 0 déterminée par le temps du premier dépassement.
 ou temps pour atteindre 0,63 K (τ) ou temps pour atteindre 0,95 K (3τ) ⇒ Constante de temps τ. Tangente à l origine = 0 ⇒ Système du 2nd ordre. Pas de dépassement ⇒ z > 1. Si dépassement ⇒ z < 1 et déterminé à partir de l amplitude du premier dépassement. 0 déterminée par le temps du premier dépassement.")
Présentations similaires





 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")





 Résumé>")


 III-1 Définitions III-2 SLI à temps continu III-3 SLI à temps discret.>")


 Enseignant: Jean-Philippe Roberge Jean-Philippe Roberge.>")


