Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Structures de données IFT-2000
Abder Alikacem Les graphes Semaine 5 Édition Septembre 2009 Département d’informatique et de génie logiciel

2
Première partie Introduction Nomenclature des graphes
Matrice de connectivité Clôture transitive: algorithme de Warshall Plus court chemin: algorithme de Floyd 1 2 5 4 3

3
Les graphes Modélisent quoi au juste ? 1 2 5 4 3
cartes géographiques : réseaux routiers, de téléphonie, etc. trajets d’autobus, de trains, d’avions, de commis voyageurs circuits électriques, réseaux électriques Gestion d’une ville (transport, feux tricolore, voies à sens unique etc..) Etc..
 Etc..")
4
Les graphes: définitions
2 Graphe (orienté) G = (S, A) S ensemble fini des sommets A Í S x S ensemble des arcs, i.e., relation sur S Graphe non orienté G = (S, A) A ensemble des arêtes, relation symétrique 4 1 5 3 S = { 1, 2, 3, 4, 5 } A = { (1, 2), (1, 3), (2, 3), (3, 2), (4, 4), (4, 5) } 2 4 1 3 S = { 1, 2, 3, 4 } A = { {1, 2}, {1, 3}, {1, 4}, {2, 4} }
 G = (S, A) S ensemble fini des sommets. A Í S x S ensemble des arcs, i.e., relation sur S. Graphe non orienté G = (S, A) A ensemble des arêtes, relation symétrique S = { 1, 2, 3, 4, 5 } A = { (1, 2), (1, 3), (2, 3), (3, 2), (4, 4), (4, 5) } S = { 1, 2, 3, 4 } A = { {1, 2}, {1, 3}, {1, 4}, {2, 4} }")
5
Les graphes : définitions
1 2 5 4 3 Graphe G (S,A), un graphe orienté (digraphe) S = {1,2,3,4,5}, A = {1-5,2-1,2-4,4-1,4-3,5-4} adjacence d’un nœud V si 1 arc V-W y est relié chemin suite d’arcs où le dernier d’une paire est le premier de la paire suivante (chemins simples) <2-4> et <2-1,1-5,5-4> = 2 chemins de 2 à 4 ordre d’un chemin nombre d’arcs le composant
, un graphe orienté (digraphe) S = {1,2,3,4,5}, A = {1-5,2-1,2-4,4-1,4-3,5-4} adjacence d’un nœud V si 1 arc V-W y est relié. chemin suite d’arcs où le dernier d’une paire est le premier de la paire suivante (chemins simples) <2-4> et <2-1,1-5,5-4> = 2 chemins de 2 à 4. ordre d’un chemin nombre d’arcs le composant.")
6
Les graphes : définitions
1 2 5 4 3 ordre de sortie d’un nœud (arité de sortie) ordre d’entrée d’un nœud (arité d’entrée) = degré d’un sommet circuit chemin où l’origine est égale au dernier nœud ex. : <4-1,1-5,5-4> boucle circuit d’ordre 1 graphe acyclique graphe ne contenant aucun circuit puits nœud dont l’arité de sortie est 0 source nœud dont l’arité d’entrée est 0 nœud indépendant arité d’entrée = arité de sortie = 0
 ordre d’entrée d’un nœud (arité d’entrée) = degré d’un sommet. circuit chemin où l’origine est égale au dernier nœud. ex. : <4-1,1-5,5-4> boucle circuit d’ordre 1. graphe acyclique graphe ne contenant aucun circuit. puits nœud dont l’arité de sortie est 0. source nœud dont l’arité d’entrée est 0. nœud indépendant arité d’entrée = arité de sortie = 0.")
7
Les graphes : définitions
1 2 5 4 Graphe connexe : en oubliant le sens des flèches, un graphe est connexe s’il existe un chemin entre toutes paires de nœuds sinon : graphe à composantes connexes 3 1 2 5 4 3

8
Les graphes : définitions
Graphe fortement connexe : en tenant compte du sens des flèches, un graphe est fortement connexe s’il existe un chemin entre toutes paires de nœuds Ce graphe comporte 5 composantes fortement connexes

9
Les graphes : définitions
Points d’articulation Ce graphe non orienté est connexe, c'est-à-dire formé d'une seule composante. Ce graphe contient quatre points d'articulation, c'est-à-dire un sommet qui, s'il est éliminé, “ casse ” le graphe en deux ou plusieurs morceaux. Ces points d’articulation sont : A qui déconnecte B H qui déconnecte I J qui déconnecte K G qui produit 3 composantes. Un graphe qui ne possède pas de points d’articulation est appelé bi-connexe (ou 2-connexe)
")
10
Les graphes : définitions
Graphe pondéré (valué) 1 0.8 1 2 sur 0.5 2 type-de 1 5 4 près 5 0.2 4 mange 1 0.75 à-côté saveur 3 3 à chaque arc valeur (numérique) à chaque arc valeur (nominale) Les graphes orientés et pondérés sont appelés des réseaux
 sur type-de près mange à-côté. saveur à chaque arc valeur (numérique) à chaque arc valeur (nominale) Les graphes orientés et pondérés sont appelés des réseaux.")
11
Les graphes : définitions
paillasson sur chat type-de mange près tapis lasagne à-côté saveur pepperoni Graphe pondéré : à chaque arc valeur (nominale) Graphe décoré (étiqueté) : à chaque nœud valeur
 Graphe décoré (étiqueté) : à chaque nœud valeur.")
12
Opérations importantes
Connectivité Existe-t-il un chemin entre V et W ? Quel est le chemin le plus court entre V et W ? avec chaque arc valeur de 1 ? avec un graphe pondéré ? Est-ce qu’un graphe g’ est inclus dans un autre graphe g ? 1 2 1 2 5 4 5 4 3 3 1 2 5 4 3

13
Algorithmique des graphes
Explorations Parcours en profondeur, en largeur Tri topologique Composantes fortement connexes, ... Recherche de chemins Clôture transitive (algorithme de Warshall) Chemin de coût minimal (algorithme de Floyd, Dijkstra, Bellman-Ford) ... Arbres recouvrants : Algorithmes de Kruskal et Prim Réseaux de transport Flot maximal (algorithme de Ford-Fulkerson) Divers Coloration d'un graphe
 Chemin de coût minimal (algorithme de Floyd, Dijkstra, Bellman-Ford) ... Arbres recouvrants : Algorithmes de Kruskal et Prim. Réseaux de transport. Flot maximal (algorithme de Ford-Fulkerson) Divers. Coloration d un graphe.")
14
Implantation En général, il existe 2 manières pour mettre un graphe en mémoire: Par chaînage Listes des successeurs Dans une matrice Matrice de nœuds adjacents

15
Listes des successeurs
Exemple S = { 1, 2, 3 } A = { (1,1), (1, 2), (1, 3), (2, 1), (3, 2)} 1 1 2 3 2 5 8 3 1 1 2 3 8 5
, (1, 2), (1, 3), (2, 1), (3, 2)}")
16
Matrices d’adjacences
Exemple S = { 1, 2, 3 } A = { (1,1), (1, 2), (1, 3), (2, 1), (3, 2)} M = 1 M [ i, j ] = 1 ssi j adjacent à i 2 0 1 V = 8 5 3 2
, (1, 2), (1, 3), (2, 1), (3, 2)} M = M [ i, j ] = 1 ssi j adjacent à i V =")
17
Opérations importantes
Matrice d’adjacence 1 1 2 2 5 5 4 4 3 3 graphe orienté graphe non orienté 1 2 3 4 5 1 2 3 4 5 1 1 1 1 1 1 2 1 1 2 1 1 3 3 1 4 1 1 4 1 1 1 1 5 1 5 1 1

18
Opérations importantes
1 2 Matrice d’adjacence 5 4 3 1 2 3 4 5 1 2 3 4 5 1 1 1 1 1 2 1 1 2 1 1 2 3 3 4 1 1 4 1 1 2 5 1 5 1 1 2 1 2 1 arité de sortie arité d’entrée

19
Opérations importantes
1 2 Matrice d’adjacence 5 4 3 1 2 3 4 5 1 2 3 4 5 1 1 1 1 1 2 1 1 2 2 1 1 3 3 4 1 1 2 4 1 1 5 1 1 5 1 2 1 2 1 puits source

20
Opérations importantes
Matrice d’adjacence 1 2 5 4 3 boucle 1 2 3 4 5 1 1 2 1 1 3 4 1 1 5 1

21
Opérations importantes
Matrice d’adjacence 1 2 5 4 3 chemins de longueur 1 = A 1 2 3 4 5 1 1 2 1 1 3 4 1 1 5 1

22
Opérations importantes
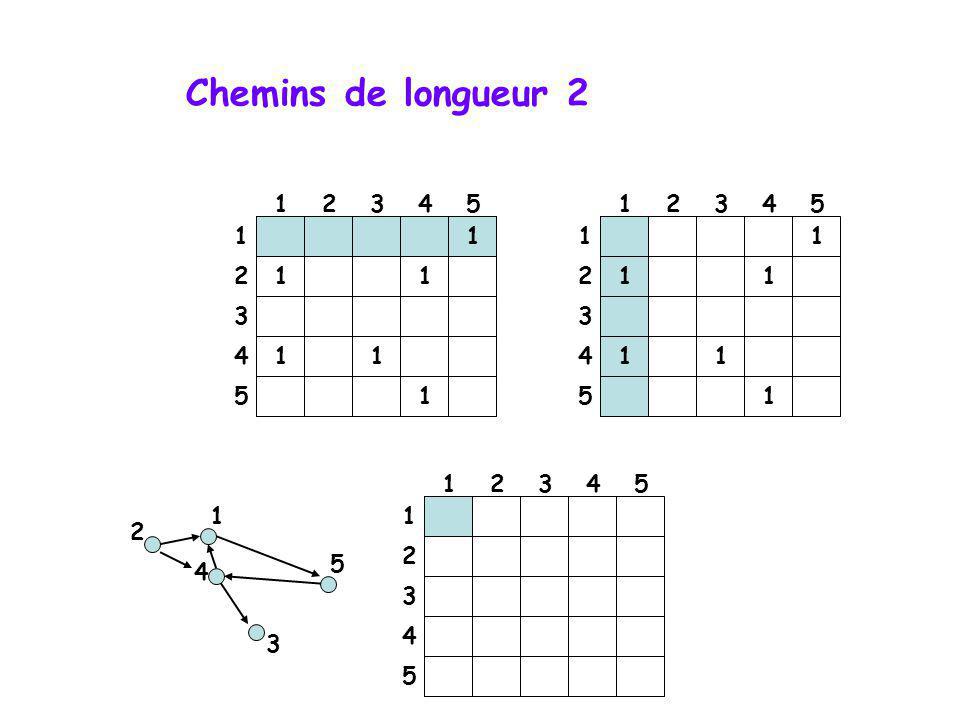
Matrice d’adjacence 1 2 5 4 3 chemins de longueur 2 ? 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 3 3 4 1 1 4 1 1 5 1 5 1

23
Opérations importantes
Matrice d’adjacence 1 2 5 4 3 chemins de longueur 2 ? 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 3 3 4 1 1 4 1 1 5 1 5 1

24
Chemins de longueur 2 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 3 3 4 1 1 4 1 1 5 1 5 1 1 2 3 4 5 1 1 2 2 5 4 3 4 3 5
25
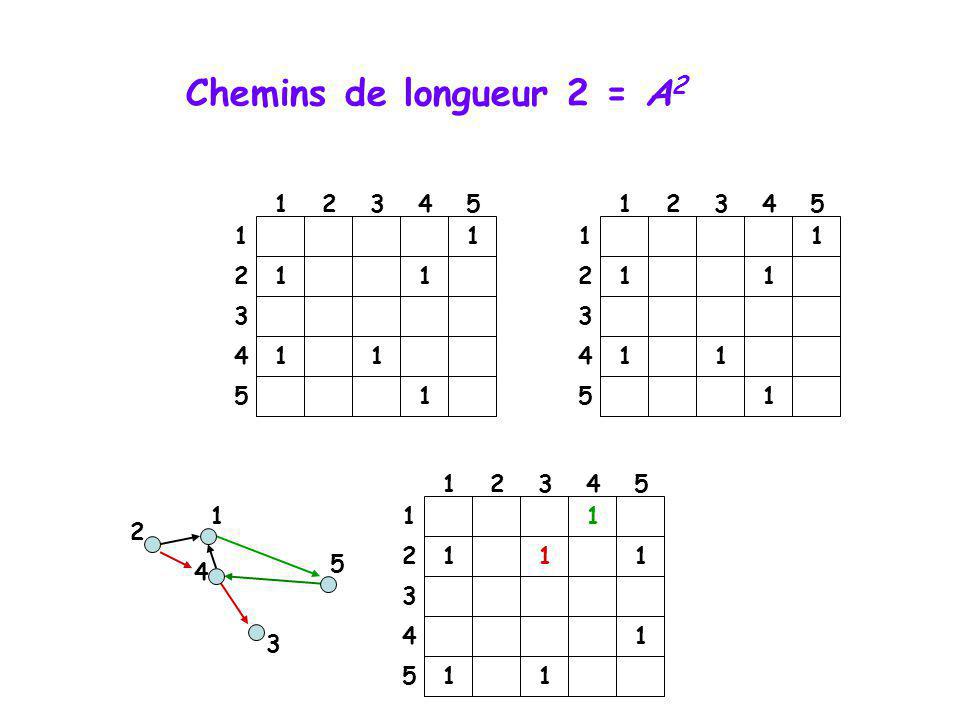
Chemins de longueur 2 = A2 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 3 3 4 1 1 4 1 1 5 1 5 1 1 2 3 4 5 1 1 1 2 2 1 1 1 5 4 3 4 1 3 5 1 1
26
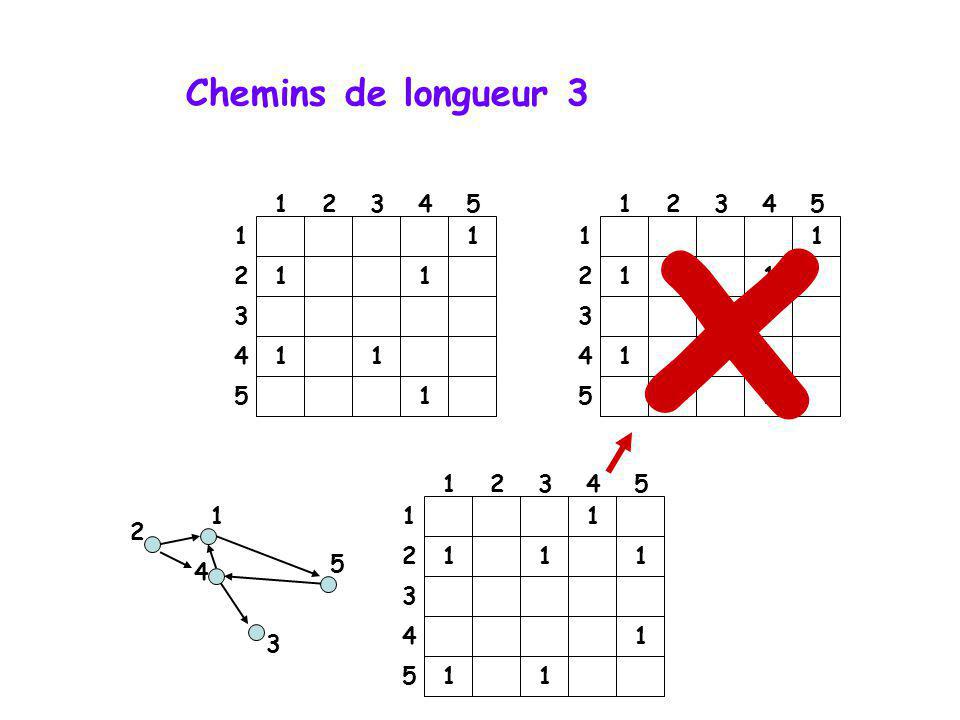
Chemins de longueur 3 x 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 3 3 4 1 1 4 1 1 5 1 5 1 1 2 3 4 5 1 1 1 2 2 1 1 1 5 4 3 4 1 3 5 1 1
27
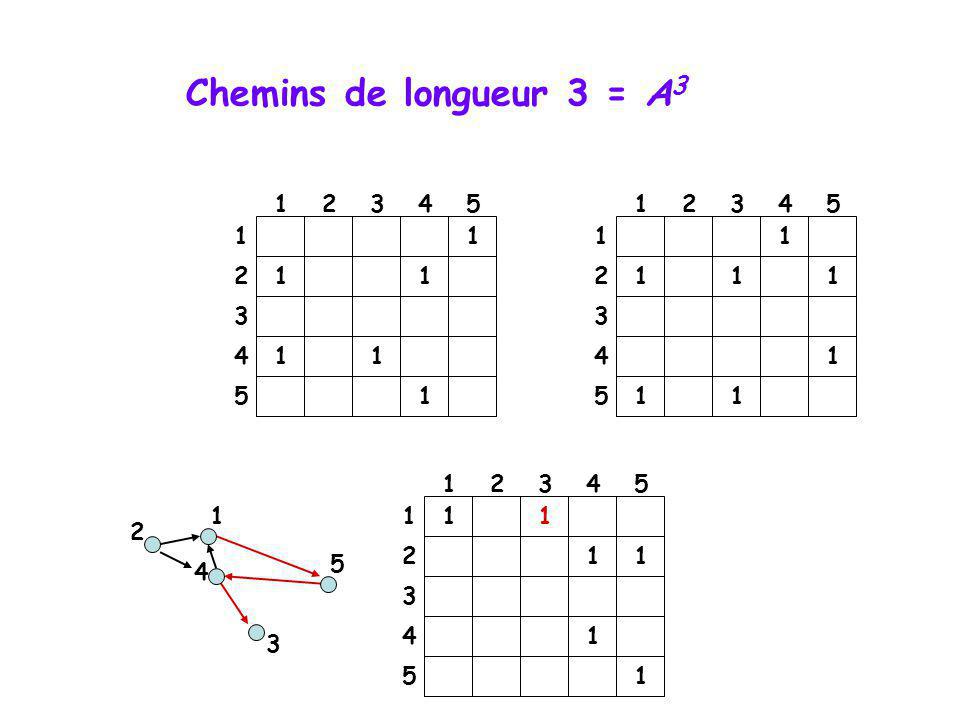
Chemins de longueur 3 = A3 1 2 3 4 5 1 2 3 4 5 1 1 1 1 2 1 1 2 1 1 1 3 3 4 1 1 4 1 5 1 5 1 1 1 2 3 4 5 1 1 1 1 2 2 1 1 5 4 3 4 1 3 5 1
28
Fermeture transitive des graphes
Définition Soit G un graphe orienté de n noeuds. Soit A la matrice de nœuds adjacents correspondant. Soit Bn-1 = A + A2 + A3 … + An-1 Complexité ? Bn-1 P : matrice de booléens qui indique s’il existe un chemin entre toutes paires de nœuds la matrice P est appelée fermeture ou clôture transitive du graphe G (dans notre cas, on a une clôture par produits de matrices).
.")
29
H : la fermeture transitive de A.
Fermeture transitive des graphes Exemple graphe G graphe H 1 2 3 4 1 2 3 4 H : la fermeture transitive de A.

30
Algorithme de Warshall
{Soit A, un graphe orienté} 1. [Initialisation] P A 2. [Boucle sur tous les sommets intermédiaires] Pour k = 1, 2, ..., n répéter jusqu'à l'étape 4. 3. [Boucle sur les sommets de départ] Pour i = 1, 2, ..., n répéter l'étape 4. 4. [Boucle sur les sommets adjacents] Pour j = 1, 2, ..., n répéter Pij Pij ou (Pik et Pkj) 5. [Fin de l'algorithme] Stop Complexité ?
 5. [Fin de l algorithme] Stop. Complexité")
31
Algorithme deWarshall
1 2 P0 = 1 2 4 3 P1 = 1 2 4 3 P2 = 4 1 3 2 P3 = 4 1 3 2 P4 = 4 3

32
Algorithme de Floyd pour k = 1 à n faire pour i = 1 à n faire
pour j = 1 à n faire C [i, j] ¬ MIN { C [i, j] , C [i, k] + C [k, j] } ; k j k c MIN { a, b + c } Ck = i b a i j a k b c

33
Floyd Warshall 1 2 4 3 0 1 0 1 0 0 1 0 0 1 0 1 1 1 0 0
1 1 1 1 1 1 1 C A L U M T R I E P 1 = P0 = P0 = 1 1 1 1 1 1 1 2 1 2 P1 = P1 = P 2 = 1 4 3 P2 = P2 = P 3 = P3 = P3 = P 4 = P4 = P4 = Floyd Warshall

34
Algorithme de Floyd Complexité ? Algorithme de Floyd
{Soit A, un graphe orienté.} 1. [Initialisation] C A 2. [Boucle sur les sommets intermédiaires] Pour k = 1, 2, ..., n répéter jusqu'à l'étape 4. 3. [Boucle sur les sommets de départ] Pour i = 1, 2, ..., n répéter l'étape 4. 4. [Boucle sur les sommets adjacents] Pour j = 1, 2, ..., n répéter Cij MIN (Cij , Cik + Ckj) 5. [Fin de l'algorithme] Stop Complexité ?
 5. [Fin de l algorithme] Stop. Complexité")
35
Algorithme de Floyd et les distances
0 1 8 0 4 0 2 0 C0 = W = 1 9 2 4 7 8 1 2 0 1 8 0 4 0 1 0 C1 = 4 3 0 4 C2 = Matrice des poids : W [i,j] = 0 si i = j v((i,j)) si (i, j) A sinon C3 = C4 =
) si (i, j) A. sinon. C3 = C4 =")
36
Algorithme de Floyd et les chemins
0 1 8 0 4 0 2 0 C0 = W = P0 = 1 9 2 4 7 8 1 2 0 1 8 0 4 0 1 0 C1 = P1 = 4 3 0 4 C2 = P2 = Matrice des prédécesseurs Pk [i, j] = prédécesseur de j sur un plus court chemin de i à j dont les sommets intermédiaires sont tous k C3 = P3 = C4 = P4 =

37
Algorithme de Floyd 1 2 4 3 0 1 5 8 13 0 4 13 9 7 0 9
7 8 1 2 C4 = P4 = 4 3 Exemple de chemin distance de 2 à 1 = C4[2,1] = 13 P4[2,1] = 4 ; P4[2,4] = 3 ; P4[2,3] = 2 ; 2 3 4 9 1

38
Deuxième partie Parcours d’un graphe par contagion (ou largeur)
Parcours d’un graphe par sondage (ou profondeur) Description d’un graphe en terme de type abstrait Implantation 4 2 5 3 1
 Description d’un graphe en terme de type abstrait. Implantation")
39
Défilement d’un graphe
De nombreux algorithmes relatifs aux graphes nécessitent une procédure qui permet l'examen systématique des noeuds et des arêtes (arcs) d'un graphe G donné, une et une seule fois. La procédure consiste à classer les sommets en 3 catégories: La catégorie A des sommets déjà visités. La catégorie B des sommets adjacents à ceux de la catégorie A mais pas encore visités (sommets qui peuvent être atteints). La catégorie C des sommets invisibles qui n'ont pas encore été rencontrés du tout (qui ne peuvent pas être atteints depuis un sommet déjà visité).
 d un graphe G donné, une et une seule fois. La procédure consiste à classer les sommets en 3 catégories: La catégorie A des sommets déjà visités. La catégorie B des sommets adjacents à ceux de la catégorie A mais pas encore visités (sommets qui peuvent être atteints). La catégorie C des sommets invisibles qui n ont pas encore été rencontrés du tout (qui ne peuvent pas être atteints depuis un sommet déjà visité).")
40
Marquer les nœuds (Petit-Poucet)
Les différentes variantes de parcours dépendront de la manière dont on fait passer les sommets de la catégorie C à la catégorie B et de la B dans la A. On construit l'état initial en plaçant le sommet de départ dans la catégorie B et tous les autres dans la catégorie C. On répète alors : faire passer un sommet x de la catégorie B à la catégorie A; mettre dans la catégorie B tous les sommets de catégorie C adjacents à x. Il existe deux manières standard d'exécuter ces opérations: Parcours par contagion ou par largeur Breadth-First Search ou BFS Parcours par sondage ou en profondeur(Depth-First Search ou DFS)
")
41
Marquer les nœuds (Petit-Poucet)
Au cours de l'exécution de nos algorithmes, chaque noeud N de G sera dans l'un des trois états suivants : STATUS = 1 : (Prêt) État initial du noeud N STATUS = 2 : (Attente) Le noeud N est soit empilé, soit dans la file d'attente, en attente d'être traité. STATUS = 3 : (Traité) Le noeud N a été traité. Noter qu’au lieu de marquer les nœuds par 1, 2 ou 3, peut simplement le faire en utilisant un booléen: vrai : le nœud est soit traité soit en attente d’être traité (status =1 ou 2) Faux: le nœud n’a pas été parcouru (status = 1)
 État initial du noeud N. STATUS = 2 : (Attente) Le noeud N est soit empilé, soit. dans la file d attente, en attente. d être traité. STATUS = 3 : (Traité) Le noeud N a été traité. Noter qu’au lieu de marquer les nœuds par 1, 2 ou 3, peut simplement le faire. en utilisant un booléen: vrai : le nœud est soit traité soit en attente d’être traité (status =1 ou 2) Faux: le nœud n’a pas été parcouru (status = 1)")
42
Défilement d’un graphe
Exemple

43
Parcours par contagion
Questions Est-ce que tout graphe peut être parcouru par cet algorithme ? 1 1 2 2 5 4 5 4 3 3 Comment modifier l’algorithme pour que tout graphe soit parcouru ? Comment est-ce que l’algorithme s’arrêtera ? Pourquoi est-ce que ça marche bien pour trouver le chemin le plus court ? Quelle est la complexité de l’algorithme de parcours par largeur? L’algorithme prend un temps O(n+m)
")
44
Parcours par sondage Questions
Peut-on parcourir tout un graphe avec ce type de parcours ? Est-ce que ce parcours peut être utilisé pour trouver le chemin le plus court ? Quelle est la complexité de l’algorithme de parcours en profondeur? L’algorithme prend un temps O(n+m)
")
45
Spécifications de l’interface du type Graphe
Description en termes de types abstraits 1. ajouter un sommet à un graphe 2. ajouter un arc/arête à un graphe 3. ôter un sommet du graphe et tous les arcs/arêtes associés 4. ôter un arc/arête 5. consulter un sommet 6. voir si un chemin existe entre 2 sommets 7. trouver le chemin le plus court (# arêtes/arcs, distance) 8. trouver tous les chemins entre 2 sommets Etc..
 8. trouver tous les chemins entre 2 sommets. Etc..")
46
Implantation Il existe deux principales méthodes de modélisation des graphes en tant que type abstrait: les matrices et les listes dites de connectivité ou d'adjacence. Le choix entre elles se fera en fonction de la densité du graphe. Par densité, on entend la proportion d'arcs effectifs par rapport au nombre maximum d'arcs ou d’arêtes possibles: NbArcs / NbSommets2 dans le cas de graphe orienté. NbAretes / (NbSommets(NbSommets-1)/2) dans le cas d’un graphe non orienté
/2) dans le cas d’un graphe non orienté.")
47
Interface class Arete { public: int u; int v; Arete(int u, int v)
{this->u = u; this->v = v; } Interface template <typename T> class Graphe { public: /** Constructeur (graphe vide)*/ Graphe(); /** Constructeur à partir des sommets et arcs/arêtes*/ Graphe(vector<T> sommets, vector<Arete> aretes); Graphe (const Graphe&); Graphe(const Graphe&g, const std::vector<T>&sommets); ~Graphe (); Graphe& operator = (const Graphe&); void ajouterSommet(const T& s); void ajouterArc (const T& s1, const T& S2); void enleverArc (const T& s1, const T& s2); void enleverSommet ( const T& s); bool sommetExiste(const T& s) const; int nbSommets() const; // etc... private: //… class Sommet { public: …getData(); void setData(..); //etc.. private: … data; int no; int tag; bool pres; }
*/ Graphe(); /** Constructeur à partir des sommets et arcs/arêtes*/ Graphe(vector<T> sommets, vector<Arete> aretes); Graphe (const Graphe&); Graphe(const Graphe&g, const std::vector<T>&sommets); ~Graphe (); Graphe& operator = (const Graphe&); void ajouterSommet(const T& s); void ajouterArc (const T& s1, const T& S2); void enleverArc (const T& s1, const T& s2); void enleverSommet ( const T& s); bool sommetExiste(const T& s) const; int nbSommets() const; // etc... private: //… class Sommet. { public: …getData(); void setData(..); //etc.. private: … data; int no; int tag; bool pres; }")
48
Implantation dans une matrice d’adjacence
Classe Graphe Implantation dans une matrice d’adjacence template <typename T> class Graphe { public: //.. private: int nbSommets; T* sommets; int **mat; //implémentation dans une matrice } // de sommets adjacents 1 2 5 4 3 Cas d’un graphe orienté

49
Implantation dans une matrice d’adjacence
Classe Graphe Implantation dans une matrice d’adjacence template <typename T> class Graphe { public: //.. private: int nbSommets; T* sommets; int **mat; // trop de perte mémoire!! } 1 2 5 4 3 Cas d’un graphe non orienté Linéariser la matrice

50
Implantation dans une matrice d’adjacence
Classe Graphe 1 1 1 1 1 1 2 1 3 1 1 1 1 Implantation dans une matrice d’adjacence 4 1 1 template <typename T> class Graphe { public: //.. private: int nbSommets; T* sommets; int *mat; // tableau à une dimension } 1 2 5 4 3 Cas d’un graphe non orienté ( i + 1 ) * i / 2 + j 1 1 1 1 1 1
 * i / 2 + j")
51
STL : Standard Template Library
Conteneurs: En C++, une classe contenant un ensemble d’éléments d'un certain type est appelée conteneur. Ce sont donc eux qui contiendront les informations que l’on veut stocker. Itérateurs: utilisés pour parcourir les items qui se retrouvent dans les conteneurs, ils jouent un peu le rôle de pointeurs sur des éléments d’un conteneur. Algorithmes: utilisés pour faire des traitements sur les éléments qui se retrouvent dans les conteneurs.

52
STL : Standard Template Library
Conteneurs Séquentiels vector: tableau dynamique - extensible - accès direct en O(1) - insertions et retraits à la fin en O(1) - insertions et retraits lents au milieu list: liste doublement chaînée - insertions et retraits n’importe où en O(1) - accès au début et à la fin en O(1) - accès lent aux autres éléments
 - insertions et retraits à la fin en O(1) - insertions et retraits lents au milieu. list: liste doublement chaînée. - insertions et retraits n’importe où en O(1) - accès au début et à la fin en O(1) - accès lent aux autres éléments.")
53
Liste (list) et vecteur (vector)
Méthodes communes à vector et list push_back():Ajoute x à la fin du conteneur. pop_back(): Enlève le dernier objet du conteneur back(): Retourne l'objet situé à la fin du conteneur front(): Retourne l'objet situé au début du conteneur Pour les conteneurs de type list seulement push_front(): Ajoute x au début du conteneur pop_front(): Enlève le premier objet du conteneur Pour les conteneurs de type vector seulement operator[] : Retourne l'objet situé à la position i du conteneur at (): Comme le précédent mais déclenche une exception out of range lorsqu'un indice est incorrect. resize(): Redéfini la taille du conteneur capacity(): Retourne la capacité du conteneur reserve(): Redéfini la capacité du conteneu
:Ajoute x à la fin du conteneur. pop_back(): Enlève le dernier objet du conteneur. back(): Retourne l objet situé à la fin du conteneur. front(): Retourne l objet situé au début du conteneur. Pour les conteneurs de type list seulement. push_front(): Ajoute x au début du conteneur. pop_front(): Enlève le premier objet du conteneur. Pour les conteneurs de type vector seulement. operator[] : Retourne l objet situé à la position i du conteneur. at (): Comme le précédent mais déclenche une exception out of range lorsqu un indice est incorrect. resize(): Redéfini la taille du conteneur. capacity(): Retourne la capacité du conteneur. reserve(): Redéfini la capacité du conteneu.")
54
Les itérateurs Un itérateur peut être vu comme un pointeur sur un élément d’un conteneur. Chaque conteneur fourni un type d’itérateur. Exemple le type list<int> donne un itérateur de type : list<int> :: iterator. Tous les conteneurs offrent les mêmes fonctions de base permettant aux itérateurs d’accéder aux éléments: begin() retourne un itérateur pointant au premier élément du conteneur end() retourne un itérateur pointant après le dernier élément du conteneur
 retourne un itérateur pointant au premier élément du conteneur. end() retourne un itérateur pointant après le dernier élément du conteneur.")
55
Les itérateurs Les principaux opérateurs sont * donnant accès à la valeur, ++ et -- pour incrémenter et décrémenter une valeur. Opérateur * : Retourne l’élément de la position courante Opérateur ++ : Fait pointer l’itérateur à l’élément suivant Opérateur == : Indique si 2 itérateurs pointent sur le même élément Opérateur = : Assigne un itérateur #include <list> #include <iostream> using namespace std; int main( ) { list <int> list1; for (int i = 1; i<=40; i++) list1.push_back(i+i); list <int> :: iterator i; //reverse_iterator //const_iterator for (i = list1.begin( ); i!=list1.end( ); i++) cout <<*i << “ “ ; return 0 ; }
 { list <int> list1; for (int i = 1; i<=40; i++) list1.push_back(i+i); list <int> :: iterator i; //reverse_iterator. //const_iterator. for (i = list1.begin( ); i!=list1.end( ); i++) cout <<*i << ; return 0 ; }")
56
Retour à la classe Graphe
Implantation dans une matrice d’adjacence template <typename T> class Graphe { public: //.. private: vector<T> sommets; // Les sommets vector< vector<int> > voisins; // Les sommets adjacents } Utilisation de vector de la STL

57
Implantation dans une liste de sommets adjacents
1 Classe Graphe Implantation dans une liste de sommets adjacents template <typename T> class Graphe { public: //.. private: class Noeud { public: T data; /* au lieu de T data, on peut avoir T* ou int */ Noeud * suivant; /* chaînage des sommets adjacents */ }; /* le noeud typique du graphe */ int nbSommet; /* nombre de sommets dans le graphe */ int nbSommetMax; /* nombre total possible de sommets */ T * sommet; /* tableau représentant les sommets*/ Noeud** listeSommet; /* les listes de sommets adjacents*/ } 1 1 3 2 2 1 3 2

58
Implantation dans une liste de sommets adjacents
Classe Graphe Implantation dans une liste de sommets adjacents template <typename T> class Graphe { public: //.. private: class Noeud { public: T data; //données // dans un sommet list<int> voisins; }; vector<Noeud> listeSommets; } Utilisation de vector et list de la STL

59
Classe Graphe Implantation dans une liste de sommets adjacents
Cas d’un graphe non orienté La liste des sommets adjacents soufre de la même redondance que nous avons rencontrer avec les matrices de sommets adjacents.

60
Cas d’un graphe non orienté
Classe Graphe 4 Cas d’un graphe non orienté template <typename T> class Graphe { public: //.. private: class AreteNode { public: int sommet[2]; AreteNode * lien[2]; }; typedef AreteNode * AretePtr; class Noeud T data; AretePtr first; vector<Noeud> listeSommets; } B Solution: liste des arêtes

61
Laboratoire #5 1 2 3 1 3 2 1 2 1 2 3 template <typename T>
class Graphe { public: //Les méthodes publiques private: class Noeud T sommet; /*!< l'étiquette d'un sommet */ Noeud * suivant; /*!< pour le chaînage dans les listes de noeuds adjacents */ }; int nbNoeud; /*!< nombre de sommets dans le graphe */ int nbNoeudMax; /*!< nombre total possible de sommets */ T * tableauSommet; /*!< tableau représentant les sommets (i.e. les étiquettes)*/ Noeud** listeNoeud; /*!< structure pour les listes de noeuds adjacents*/ 2 1 3 2 1
*/ Noeud** listeNoeud; /*!< structure pour les listes de noeuds adjacents*/")
62
Exercice 1 4 4 8 1 1 1 4 4 8 Files prioritaires file file
Gestion d’une seule file insertion se fait selon la priorité éléments toujours triés selon leur priorité 1 4 4 8 1 1 1 4 4 8 in in file file

63
Exercice Pile, modèle hybride p1 pile nœud... en-tête (header) tab
suiv cpt 11 cpt 4 4 3 debut pile

Présentations similaires







 graphe (orienté) Calculer H = (S, B) où B est la clôture réflexive et transitive de A. Note : (s,t) B ssi il existe un chemin.>")











