Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Chapitre 5. Le système solaire

2
5.1. Le mouvement

3
Exemples de mouvements
Dans ce chapitre on va étudier le mouvement des corps, appelés aussi systèmes mécaniques. Exemples : - le mouvement des planètes autour du Soleil; le mouvement d’un satellite le mouvement d’une fusée le mouvement d’un avion en vol le mouvement des sportifs lors d’un entraînement le mouvement de chute d’une balle de tennis

4
La trajectoire La trajectoire est l’ensemble des points occupés par le corps (système mécanique) lors de son mouvement Lors de son mouvement un corps décrit une trajectoire. La trajectoire est l’ensemble des points occupés par le corps (système mécanique) lors de son mouvement. En fonction du mouvement, on peut rencontrer plusieurs types de trajectoires: rectilignes (une ligne droite, comme celle décrite par la balle de tennis lâchée à une certaine hauteur ) curviligne (le courbe décrite lors du mouvement est quelconque). Une voiture qui roule sur route peut avoir une trajectoire rectiligne. Lorsqu’elle prend un virage sa trajectoire sera. Dans la classe des trajectoires curvilignes on peut rencontrer de trajectoires particulières : circulaires (le système mécanique décrit des cercles lors de son mouvement, comme par exemple les planètes en rotation autour du Soleil) paraboliques (lors de son saut le skieur décrit une parabole)
 lors de son mouvement. En fonction du mouvement, on peut rencontrer plusieurs types de trajectoires: rectilignes (une ligne droite, comme celle décrite par la balle de tennis lâchée à une certaine hauteur ) curviligne (le courbe décrite lors du mouvement est quelconque). Une voiture qui roule sur route peut avoir une trajectoire rectiligne. Lorsqu’elle prend un virage sa trajectoire sera. Dans la classe des trajectoires curvilignes on peut rencontrer de trajectoires particulières : circulaires (le système mécanique décrit des cercles lors de son mouvement, comme par exemple les planètes en rotation autour du Soleil) paraboliques (lors de son saut le skieur décrit une parabole)")
5
Types de trajectoires rectilignes curvilignes circulaires paraboliques

6
Application / p.92

7
Référentiel Le corps par rapport lequel on décrit le mouvement d’un système mécanique porte le nom de référentiel. Dans le TP « La relativité du mouvement » on a vu que le mouvement d’un point de la roue d’un vélo décrit une trajectoire circulaire lorsque l’on l’observe du vélo et est une courbe compliquée lorsque l’on observe de la salle de classe. Il faut donc toujours spécifier par rapport à quel corps on décrit le mouvement d’un corps . Le corps par rapport lequel on décrit le mouvement d’un système mécanique porte le nom de référentiel. Pour pouvoir spécifier la position du système mécanique à chaque instant, on associe au corps de référence un système d’axe et une horloge. Pour des mouvement de courte durée (jusqu’à quelques heures) on peut utiliser comme référentiel le sol, ou tout objet fixe par rapport à la Terre. On appelle ce référentiel, référentiel terrestre. Lorsque l’on doit observer des mouvements de plus longue durée ( plusieurs jours, comme dans le cas d’un satellite ou de la Lune) le référentiel terrestre n’est plus adapté. A cause du mouvement de rotation de la Terre autour de son axe, même le plus simple mouvement devient très compliqué lorsqu’il est décrit par rapport à la surface de la terre (référentiel terrestre). On va utiliser dans ce cas un corps de référence situé au centre de la Terre, car en ce point on peut ignorer le mouvement de rotation ce celle-ci. Un tel référentiel est appelé géocentrique. Si l’on doit étudier des mouvements encore plus longs, comme par exemple le mouvement des planètes, le référentiel le plus adapté sera situé au centre du Soleil. C’est le référentiel héliocentrique. terrestre géocentrique héliocentrique
 on peut utiliser comme référentiel le sol, ou tout objet fixe par rapport à la Terre. On appelle ce référentiel, référentiel terrestre. Lorsque l’on doit observer des mouvements de plus longue durée ( plusieurs jours, comme dans le cas d’un satellite ou de la Lune) le référentiel terrestre n’est plus adapté. A cause du mouvement de rotation de la Terre autour de son axe, même le plus simple mouvement devient très compliqué lorsqu’il est décrit par rapport à la surface de la terre (référentiel terrestre). On va utiliser dans ce cas un corps de référence situé au centre de la Terre, car en ce point on peut ignorer le mouvement de rotation ce celle-ci. Un tel référentiel est appelé géocentrique. Si l’on doit étudier des mouvements encore plus longs, comme par exemple le mouvement des planètes, le référentiel le plus adapté sera situé au centre du Soleil. C’est le référentiel héliocentrique. terrestre. géocentrique. héliocentrique.")
8
La relativité du mouvement
La trajectoire d’un système mécanique dépend du référentiel d’étude. Pour cette raison, il faut toujours spécifier le référentiel par rapport auquel on étudie le mouvement. Le mouvement d’un point d’une roue de vélo est une cycloïde lorsqu’il est observé par rapport au référentiel terrestre et un cercle lorsqu’il est décrit par rapport au référentiel du vélo. On trouve une situation similaire lorsque l’on observe la planète Mars avec un télescope situé sur Terre. A certains moments de l’année cette planète semble s’arrêter et repartir en arrière. On parle du mouvement de rétrogradation de Mars. Le même phénomène est observé pour toute autre planète observée depuis la Terre. Observés depuis le Soleil, tous ces mouvements sont presque circulaires (en réalité elliptiques). Tout dépend donc d’où on observe le mouvement, autrement dit, de quel référentiel. La rétrogradation de Mars est observée lorsque le référentiel d’étude est le référentiel terrestre. En revanche, les trajectoires des planètes sont elliptiques par rapport au référentiel héliocentrique. En général, la trajectoire d’un système mécanique dépend du référentiel d’étude. Pour cette raison, il faut toujours spécifier le référentiel par rapport auquel on étudie le mouvement.
. Tout dépend donc d’où on observe le mouvement, autrement dit, de quel référentiel. La rétrogradation de Mars est observée lorsque le référentiel d’étude est le référentiel terrestre. En revanche, les trajectoires des planètes sont elliptiques par rapport au référentiel héliocentrique. En général, la trajectoire d’un système mécanique dépend du référentiel d’étude. Pour cette raison, il faut toujours spécifier le référentiel par rapport auquel on étudie le mouvement.")
9
a- référentiel terrestre (1)
b- héliocentrique (3) c- marsocentrique (2)
 c- marsocentrique (2)")
10
6. 1-oui 2- mouvement de rétrogradation de Mars (voir cours) 7. 1. a- Joris est fixe sur son fauteuil, donc fixe par rapport à la Terre. Par rapport au référentiel terrestre, la trajectoire du nez de Joris se réduit à un point. b- la trajectoire est un cercle (tout point de la Terre, ou fixe par rapport à la Terre décrit des cercle de centres situés sur l’axe de rotation de la Terre autour d’elle même 2. Dans le référentiel terrestre le nez de Joris a une vitesse nulle, alors que dans le référentiel de la Terre le nez de Joris a une vitesse égale à la vitesse de rotation de la Terre à la latitude où Joris se place. 3. Le mouvement est relatif car il dépend du référentiel par rapport auquel il est décrit.

11
3 / p.93

14
5.2. les forces

15
Action mécanique En physique, lorsqu'un objet agit sur un autre, on parle d'action mécanique La dame exerce une action mécanique que le balai. Elle serre le balai dans ses mains.

16
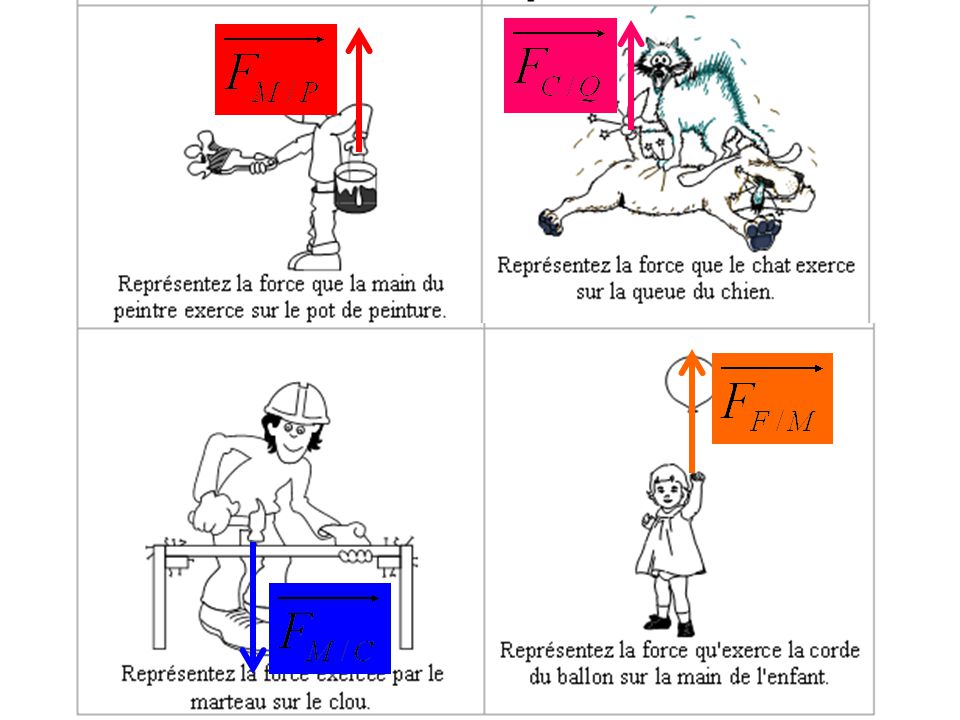
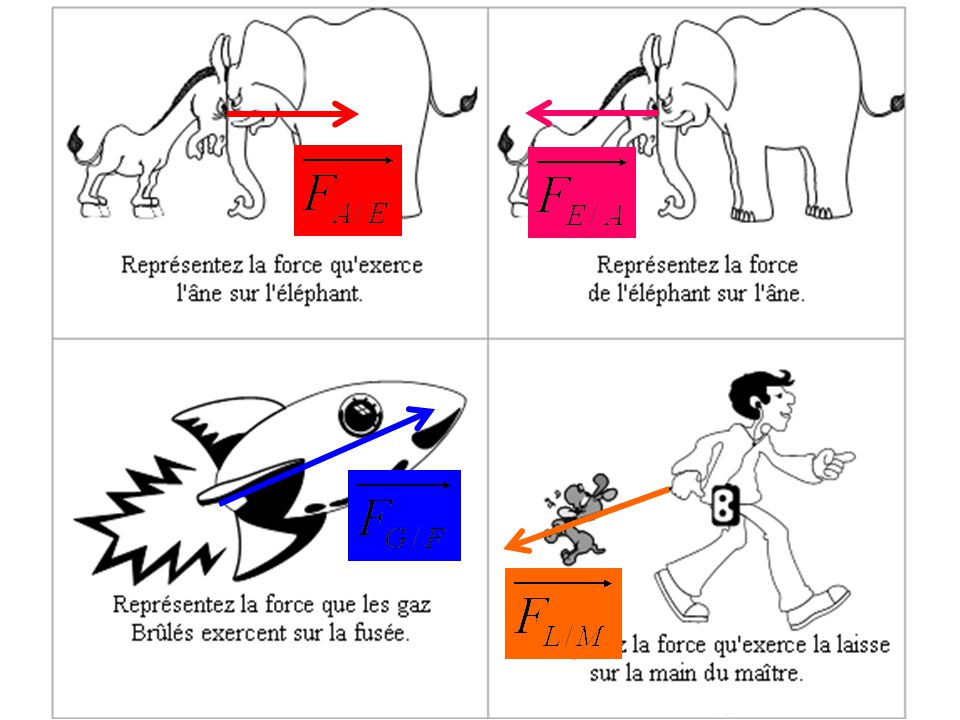
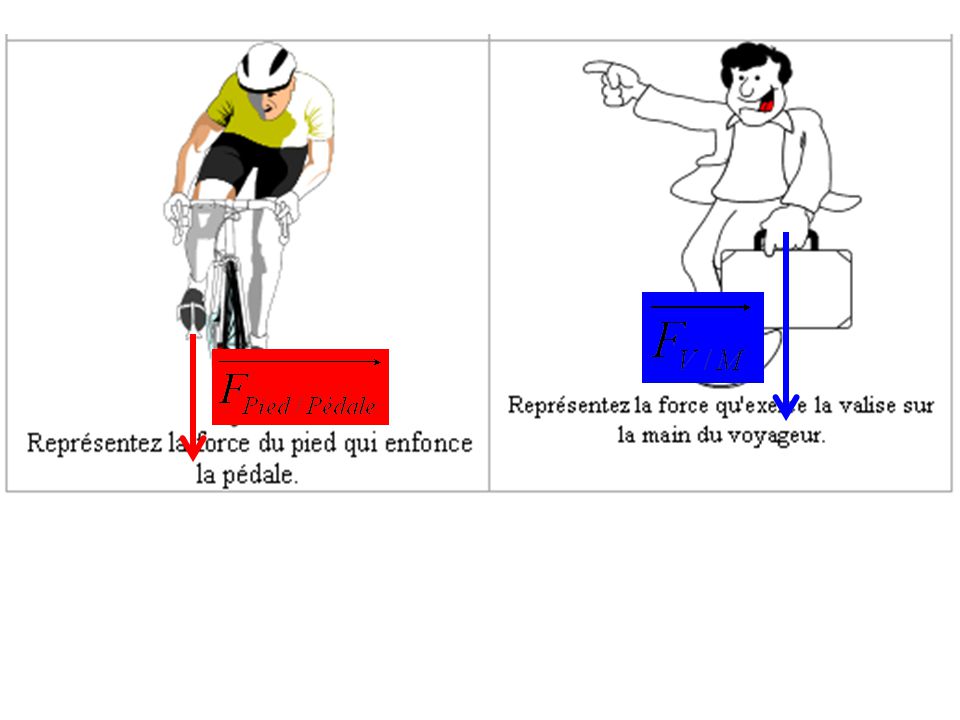
Modélisation d’une action mécanique par une force
Une action mécanique peut être modélisée par un vecteur qui a le point d’application au point où l’action mécanique s’exerce, de direction et sens identiques à ceux de l’action mécanique. Par exemple le marteau exerce une action mécanique sur le clou. Cette action s’exerce sur le clou, sur la verticale, de haut vers le bas. Elle peut être donc décrite par un segment de droite orienté, c’est-à-dire un vecteur, de point d’application le point où le marteau touche le clou ( c’est un point situé sur le clou), de direction verticale et de sens de haut vers le bas.
, de direction verticale et de sens de haut vers le bas.")
17
Caractéristiques d’une force
Toute force, ou action mécanique est caractérisée par : son point d’application ( le point où elle s’exerce); sa direction son sens sa norme, exprimée en newton (symbole N) Par exemple, dans la figure on décrit l’action mécanique exercée par une raquette de tennis sur une balle par une force appliquée sur la balle, au point où la balle touche la raquette, de direction perpendiculaire à la raquette et de sens de la raquette vers la balle.
; sa direction. son sens. sa norme, exprimée en newton (symbole N) Par exemple, dans la figure on décrit l’action mécanique exercée par une raquette de tennis sur une balle par une force appliquée sur la balle, au point où la balle touche la raquette, de direction perpendiculaire à la raquette et de sens de la raquette vers la balle.")
18
Mesure de la force Les forces se mesurent (quand c’est possible) avec un appareil appelé dynamomètre. Il existent plusieurs types de dynamomètres ( voir figure). Chaque dynamomètre a un calibre indiqué sur son support (c’est la force maximale qu’il peut mesurer). Il faut donc utiliser des dynamomètres adaptés aux forces que l’on mesure. Par exemple, pour mesurer des forces d’ordre de 2N on va utiliser plutôt une dynamomètre de calibre 5N que 10N ! Un mauvais choix de calibre implique des erreurs importantes dans les résultats de mesure de la force.
 avec un appareil appelé dynamomètre. Il existent plusieurs types de dynamomètres ( voir figure). Chaque dynamomètre a un calibre indiqué sur son support (c’est la force maximale qu’il peut mesurer). Il faut donc utiliser des dynamomètres adaptés aux forces que l’on mesure. Par exemple, pour mesurer des forces d’ordre de 2N on va utiliser plutôt une dynamomètre de calibre 5N que 10N ! Un mauvais choix de calibre implique des erreurs importantes dans les résultats de mesure de la force.")
19
Applications :

23
2 cm 2 cm 1.4 cm 0.5 cm 1.5 cm

24
Effets d’une force sur le mouvement d’un corps :
Une force peut : mettre en mouvement un système mécanique ou lui modifier la vitesse ( le footballeur tape le ballon. Soit il le met en mouvement s’il était au repos, soit il lui augmente la vitesse s’il était déjà en mouvement). peut modifier la trajectoire d’un système mécanique ( la volailleuse modifie la trajectoire du ballon lorsqu’elle la frappe ) peut déformer les corps ( les deux conduits ont subit des forces de pression suite à des variations importantes de température)
. peut modifier la trajectoire d’un système mécanique ( la volailleuse modifie la trajectoire du ballon lorsqu’elle la frappe ) peut déformer les corps ( les deux conduits ont subit des forces de pression suite à des variations importantes de température)")
25
Rôle de la masse Les effets des actions mécaniques dépend de la masse des systèmes mécaniques sur lesquels elles agissent. Plus la masse est petite, plus les effets sont importants.

26
5.3.Le principe d’inertie

27
5.3. Le principe d’inertie Lors d’un jeu de curling, les sportifs frottent la glace devant le palet. Le but est de rendre le sol ( la glace) plus lisse. Il faut que le palet glisse bien. Ils veulent donc réduire les frottements entre le palet et la glace. On peut imaginer que, sur une surface parfaite (sans aucune aspérité) les sportifs ne devraient plus faire des efforts pour faire avancer le palet. Il avancerait sans aucun problème jusqu’au premier obstacle. Sur une piste imaginaire infinie et sans aucun obstacle, le palet ne s’arrêterait jamais ! On peu aussi penser à un véhicule dans l’espace qui a une certaine vitesse, qui ne subit aucun frottement (il n’y a pas d’air) et qui ne rencontre aucun obstacle. Ce véhicule va garder sa vitesse inchangée indéfiniment et ne s’arrêtera jamais. C’est le contenu du principe d’inertie: Un corps est immobile ou en mouvement rectiligne uniforme si et seulement si les forces qui s’exercent sur lui se compensent ( ou s’il n’est soumis à aucune force)
 plus lisse. Il faut que le palet glisse bien. Ils veulent donc réduire les frottements entre le palet et la glace. On peut imaginer que, sur une surface parfaite (sans aucune aspérité) les sportifs ne devraient plus faire des efforts pour faire avancer le palet. Il avancerait sans aucun problème jusqu’au premier obstacle. Sur une piste imaginaire infinie et sans aucun obstacle, le palet ne s’arrêterait jamais ! On peu aussi penser à un véhicule dans l’espace qui a une certaine vitesse, qui ne subit aucun frottement (il n’y a pas d’air) et qui ne rencontre aucun obstacle. Ce véhicule va garder sa vitesse inchangée indéfiniment et ne s’arrêtera jamais. C’est le contenu du principe d’inertie: Un corps est immobile ou en mouvement rectiligne uniforme si et seulement si les forces qui s’exercent sur lui se compensent ( ou s’il n’est soumis à aucune force)")
28
5.3. La gravitation universelle

29
L’interaction gravitationnelle est une force qui s’exerce entre deux masses quelconques. Elle est responsable de la stabilité de l’Univers. Cette interaction est décrite par la loi de Newton: la force qui s’exerce entre deux masses ponctuelles m1 et m2 situées à une distance d est

30
Hachette, p.107

31
Le poids

32
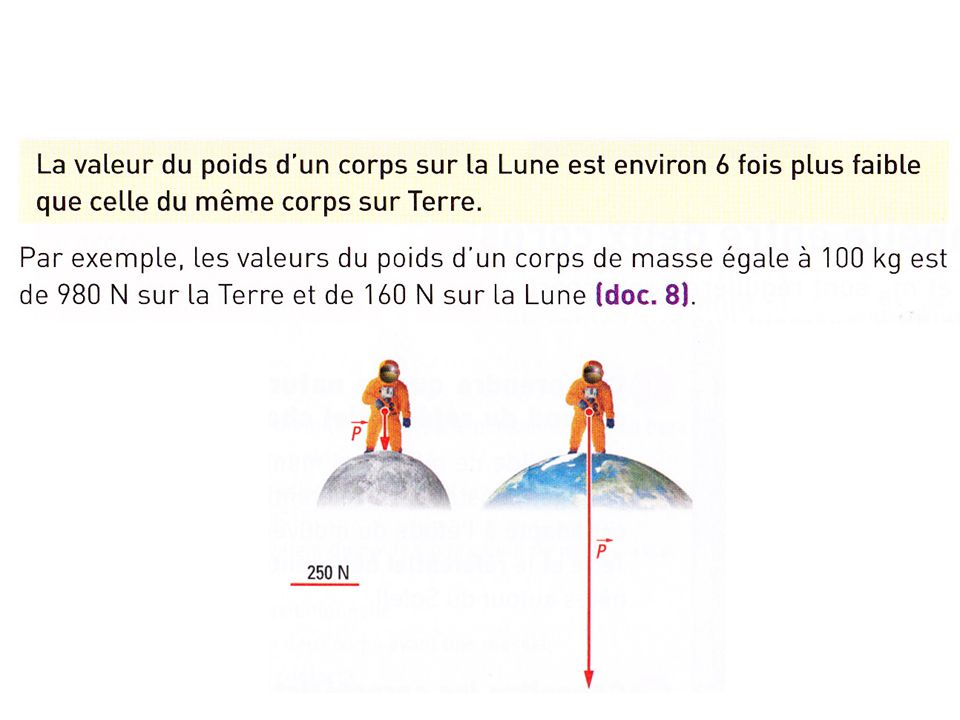
Application : le poids d’un corps sur la Lune
gL= 1,6 N/kg

34
Hachette, p.107

Présentations similaires













>")






