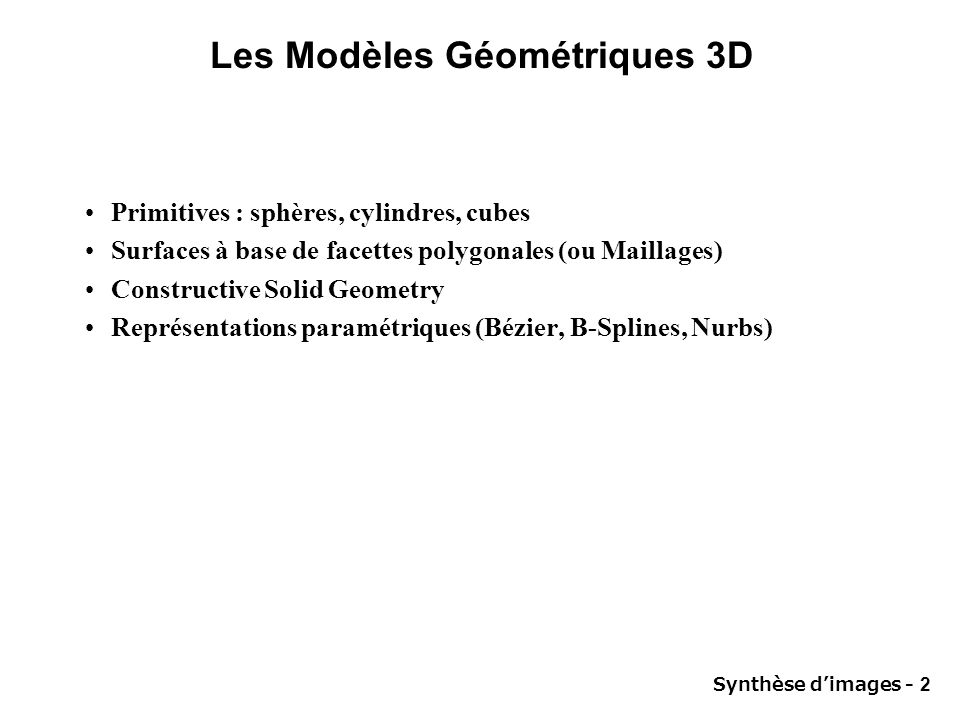
Chaîne de Synthèse Réel Modélisation Rendu Image Fichier Scène ex. VRML, ... Fichier Image ex. BMP, JPG, ...
Les Modèles Géométriques 3D Primitives : sphères, cylindres, cubes Surfaces à base de facettes polygonales (ou Maillages) Constructive Solid Geometry Représentations paramétriques (Bézier, B-Splines, Nurbs)
z y x Modèles géometriques Primitives Facettes Sphere (Xo, Yo, Zo, R) Liste de facettes Boite (Xo, Yo, Zo, W, L, H) Liste d’arêtes Cône (Xo, Yo, Zo, R, r, H) Liste de points La normale donne l’orientation de la facette x y z
Maillages Calcul de la normale Quelles structures de données ?
Approximations Polyhédriques les maillages
Niveaux de détails des Surfaces Triangulées
Surface, profils, Objets de revolution Facettes quadrangulaires car planaires par construction. Justification de facettes planes : opérations sur les objets ; géométrie : un point est-il à l’extérieur ou à l’intérieur de l’objet ? Axe de révolution Profil L’objet résultant est modélisé par un ensemble de facettes quadrangulaires
Génération de terrains ; modèle fractale
Constructive Solid Geometry (CSG) Générer des formes complexes à l’aide de primitives. Dessiner un objet : rogner des parties, percer des trous, … Coller des pièces entre-elles Utilisé généralement dans la CAO. Soustraction (cube - sphère) Intersection Union Objets de départ Operation possibles union intersection soustraction
Un Train CSG Brian Wyvill & students, Univ. of Calgary
Représentations Paramétriques Principe dessiner quelques choses de courbes (lisses et continues) édition locale : retouches ponctuelles, influence limitée Solution Générale courbes paramétriques polynomiales (par morceaux) définies par des points de contrôle (enveloppe convexe) nb de pts de contrôle lié au degrés du polynome Modèles Bézier B-Spline Nurbs Bézier B-Spline Nurbs
Transformations Géométriques Modélisation Transformations Géométriques
Transformations Géométriques CAMERA Repère du Monde placement des objets placement de la caméra (point de vue) Transformations translation, rotation, mise à l’échelle construire des scènes complexes en positionnant des objets simples (transformations successives) transformer les coordonnées de l’objet en coordonnées du Monde Projection pyramide de vue projection en perspective clipping OBJECT WORLD Un pied générique est construit une seule fois, puis chaque pied de la table est une instanciation du premier Il est ensuite déplacé à la bonne position.
Translation 2D Une translation est une somme vectorielle Avant Après
Mise à l’échelle 2D Avant Après Le changement d’échelle est une multiplication matricielle les coordonnées sont multipliées par le facteur d’échelle Avant Après
Rotation 2D q Avant Après La rotation est une multiplication matricielle q Avant Après
Coordonnées homogènes On veut une notation unifiée pour toutes les transformations ! Addition ou bien multiplication ? Comment faire pour combiner plusieurs transformations ? Coordonnées homogènes On ajoute une troisième coordonnée w Un point 2D devient un vecteur à 3 coordonnées : Deux points sont égaux si et seulement si x’/w’ = x/w et y’/w’= y/w Utile aussi pour les projections w=0 permet de représenter les points « à l’infini »
Coordonnées Homogènes Toutes les transformations 2D peuvent être exprimées comme des produits matrice/vecteur en coordonnées homogènes (notation très générale)
Composition des transformations Il suffit de multiplier les matrices composition d’une translation suivie d ’une rotation : M = R.T composition d’une rotation suivie d ’une translation : M = T.R rotation autour d’un point Q : 1) Translation du marteau jusqu’au repère du monde, 2) Effectuer la rotation désirée, 3) Effectuer la translation inverse 1 2 3 1bis Q
Exercice Rotation autour d’un point Q Translater Q à l’origine : TQ Rotation autour de l’origine d’un angle Q : RQ Translater en retour vers Q : - TQ Calculer la matrice de transformation M=-TQ.RQ..TQ
Et en 3 dimensions ? C’est pareil, on introduit une quatrième coordonnée, w Toutes les transformations sont des matrices 4x4 Matrice de translation Matrice de mise à l’échelle
Rotations en 3D Rotation simple d ’un angle autour de l ’axe x, y ou z la matrice dépend de l’axe et de l’angle Rotation complexe par combinaison de rotations simples produits matriciels
Exercice Ecrire la matrice de transformation à associer à l’objet cube ci-dessous pour qu’il passe dans la position B. z y A B x