Chapitre III : DYNAMIQUE DU POINT Les lois de la dynamique établissent les liens entre le mouvement du corps et les causes ayant déclenché ou modifié ce mouvement. Et connaissant les conditions initiales de ce mouvement, il est possible de prévoir son déroulement ultérieur. I-NOTION DE FORCES La notion de force est intuitive, elle n’apparaît qu’à travers les différents effets qu’elle produit. Exemples: Déformation d’un corps,Tirer sur un ressort,…… B A 1.2- Quantité de mouvement La quantité de mouvement (q.d.m) d’un point matériel M(m) mobile est le produit de sa vitesse par sa masse. La quantité de mouvement de M(m) est donc lié à la quantité de matière contenue dans le point matériel mobile. Et sera notée :
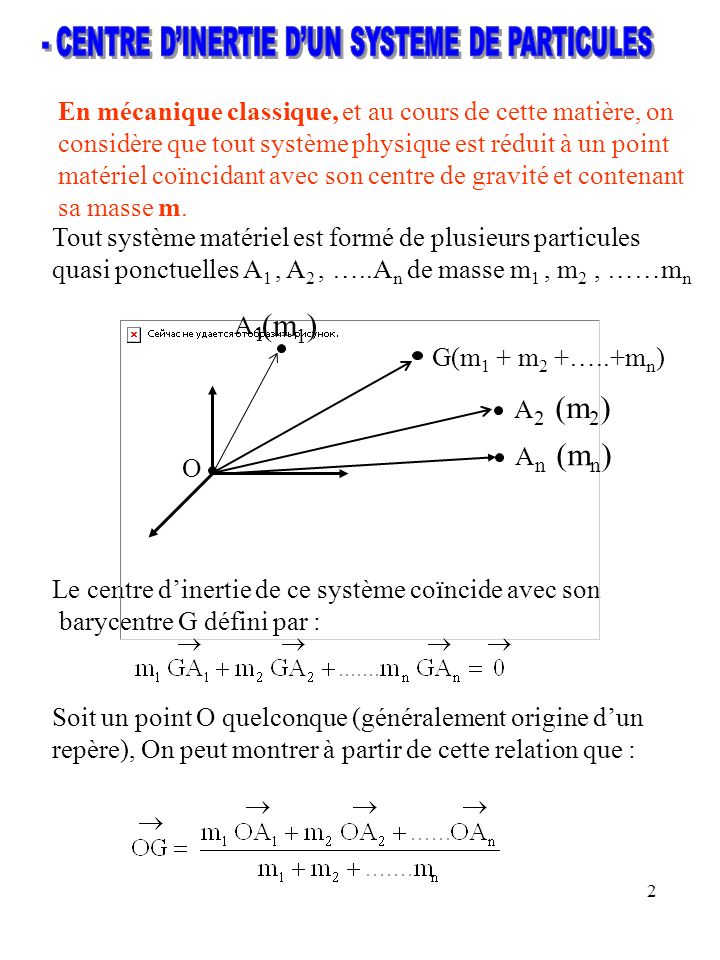
- CENTRE D’INERTIE D’UN SYSTEME DE PARTICULES En mécanique classique, et au cours de cette matière, on considère que tout système physique est réduit à un point matériel coïncidant avec son centre de gravité et contenant sa masse m. Tout système matériel est formé de plusieurs particules quasi ponctuelles A1 , A2 , …..An de masse m1 , m2 , ……mn Le centre d’inertie de ce système coïncide avec son barycentre G défini par : Soit un point O quelconque (généralement origine d’un repère), On peut montrer à partir de cette relation que : A1 (m1) G(m1 + m2 +…..+mn) A2 (m2) An (mn) O
1ère loi : Principe d’inertie. II- LOIS DE NEWTON (1687) D2 Ces lois constituent les lois fondamentales de la mécanique. 1ère loi : Principe d’inertie. Un corps soumis à aucune force reste immobile ou décrit un mouvement rectiligne uniforme. Si donc 2ème loi : Principe fondamental de la dynamique. Lorsque la force totale agissant sur un corps est Celle-ci lui communique une accélération telle que l’on ait : Relation qui définit la grandeur scalaire caractérisant l’inertie du corps et qu’on appelle sa masse m. 3ème loi : Principe de l’action et de la réaction Quand deux corps 1et 2 interagissent, la force Exercée par le corps 1 sur le corps 2 est égale et opposée à la force exercée par le corps 2 sur le corps 1: Exemple : Interaction à distance Terre / Lune. La Terre attire la Lune avec une force FT\L Réciproquement, la Lune attire la Terre avec une Force FL\T égale et opposée à FT\L : FL\T = - FT\L FT\L FL\T Terre Lune
III- FORME GÉNÉRALE DE LA SECONDE D3 LOI DE NEWTON (PFD) Le P. F.D s'annonce sous la forme : En l’absence de force, le vecteur est invariant. Et en présence d'une force , il évolue conformément à l'équation : ou bien qui s’écrit encore : Lorsque la masse du point matériel est invariante au cours du mouvement, cette équation se simplifie et prend, en introduisant le vecteur accélération , la forme suivante : Dans la mécanique moderne, il est démontré que la masse d’un corps dépend de la vitesse du mouvement quand celle-ci s’approche de celle de la lumière c (c=3. 108 m/s): Où m0 est la masse constante du corps à la vitesse v. Nous admettons, dans ce cours de mécanique classique, que la vitesse v est négligeable devant la célérité de la lumière c.
A1 m1 A2 m2 4.1- Les forces à distance IV- DIFFERENTS TYPES DE FORCES : D4 4.1- Les forces à distance Ce sont des forces dont la portée peut être étendue jusqu'à l'infini, parmi lesquelles on peut citer : a - Force d'attraction universelle Si on considère deux particules A1 et A2 de masses m1 et m2 voisines l'une de l'autre, alors chacune exerce sur l'autre une force dite d'attraction universelle de Newton. A1 m1 A2 m2 Avec r = /A1A2/ Où G est la constante universelle , G = 6,6710-11 N.m2/kg2 b-Force électrostatique (voir cours d'électricité en S2) Considérons deux particules de charges électriques q1 et q2 , ces deux particules exercent l'une sur l'autre des forces d'interactions données par la loi de Coulomb : Où K= 8,99.109 Nm/Coul2 4.2- Forces de contact Exemples : - Les contraintes mécaniques.- Les forces de frottements.- Les liaisons chimiques. - Les interactions nucléaires…..
S il n y a pas de frottement du sol sur M, on a: FORCE DE FROTTEMENT Soit une particule qui peut glisser sur un support. Il est soumis à deux forces : le poids : la réaction du sol sur M : Dans le cas général, la force est inclinée par rapport à la normale à la surface de glissement. Sens du déplacement ( u ) T N P R j M(m) N force normale à la surface de contact T force tangente à cette surface : Remarque : S il n y a pas de frottement du sol sur M, on a:
V- REFERENTIELS GALILEENS D5 5.1- Définition Un référentiel R , dans lequel la 1ère loi de Newton est vérifiée, est Galiléen : R est en Mouvement rectiligne uniforme ou au repos - Exemples de repères Galiléens 1- Référentiel de Copernic : l’origine est le centre de gravité du système solaire et les ses axes sont dirigés vers trois étoiles fixes 2- Référentiel terrestre : l’origine est le centre de la Terre et les axes sont liés à la Terre. 5.2- Remarques pratiques 1- Si un repère quelconque R est en mouvement rectiligne uniforme ou au repos par rapport à un repère Galiléen, ce repère R est Galiléen. 2- Dans un repère Galiléen, les forces exercés sur une particule, lié à ce repère, sont uniquement des forces réelles ( Poids, Réactions, …..) 3- Soient un repère R0 Galiléen et un repère R en mouvement par rapport à R0 . R est Galiléen , si et la vitesse de son origine est constante par Rapport à R0
VI- APPLICATION DU P.F.D D6 1- Choisir le système à étudier : Particule M de masse m. 2- Faire l’inventaire des forces extérieures : a- Forces réelles Si M possède une masse m non négligeable : , Si M est en contact avec une droite, une surface,plan,.. : , Si M est suspendue par un fil,…. : tension du fil : Si M est accrochée à un ressort de raideur k : Si M est plongée dans un fluide de viscosité : b-Forces imaginaires ( Fictives) Par définition : est la force d’entraînement, est la force de Coriolis. 3- Ecriture du PFD a- Dans R fixe (absolu) par rapport à un repère Galiléen (a) b- Dans R’ Non Galiléen mobile (relatif) par rapport à R (b) Remarque et observation : Les relations (a) et (b) sont équivalentes, en effet si on remplace par son expression dans la relation (a), on obtient la relation (b). Discuter le sens de chaque relation? Les forces par rapport à R sont toutes des forces réelles et celles par rapport à R’ sont des forces réelles et imaginaires.
V- APPLICATION DU PFD (suite) D8 4- Projection du PFD Dans un repère de dimension n, la projection de l’équation vectorielle du PFD sur une base choisie, nous donne n équation scalaire indépendantes. - Etude de cas : Pour n=3 La projection du PFD sur une base nous donne 3 équations scalaires. En général dans un problème, les inconnues sont: l’élongation du point matériel ( distance ou angle….) donc l’équation du mouvement, les trois composantes de la réaction due aux frottements. Donc le problème est indéterminé en effet le nombre d’inconnues (4) est supérieur à celui des équations (3). Pour résoudre ce problème, il faut donc une autre équation. L’hypothèse de non frottement par exemple peut nous fournir cette quatrième équation. Cette quatrième équation représente la condition de non frottement. On l’obtient, en écrivant que la réaction est perpendiculaire au déplacement (sens du mouvement de M), c’est-à-dire que la réaction R n’a pas de composante suivant le sens du mouvement dl, soit : R . dl = 0 d’où l’utilité de projeter le PFD sur une base Contenant un vecteur de sens dl.
Exemple (voir cours)
correction (voir cours)