Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Faculté des Sciences de Tunis
Rapport d'avancement de thèse de doctorat Présenté par : Mr. Khalfa Mohamed Abdellatif

2
Plan de la présentation
1 Introduction 2 Cadre général 3 Travaux achevés 4 Travaux à réaliser 5 Projet des publications 6 Conclusion

3
1. Introduction Unité de recherche: 1 2 3 4 5 6
Laboratoire de Nanomatériaux et de Systèmes d’Energies au Centre de Recherches et des Technologies de l’énergie au Technopôle de Borj Cédria. Réseau et Machines Electriques à L’INSAT Directeur de thèse : Pr MHIRI Radhi à la F. S. Tunis Co-encadreurs :Dr SELLAMI Anis à l’ESSTT Dr ANDOULSI Ridha au T. Borj Cédria. Titre : Etude de la commande non linéaire par mode glissant des machines asynchrones: Application à un groupe moto pompe asynchrone triphasé couplé à un générateur photovoltaïque fonctionnant en MPPT au fil de soleil

4
1 2 3 4 5 6 2. Cadre général GPV & MPPT CMG

5
1 1 2 3 4 5 6 Les éléments du système photovoltaïque étudié sont : · un GPV et son filtre passe-bas, · un OMLI de tension, · un moteur asynchrone à cage, · Une pompe centrifuge. Le processus étudié est un système de pompage, à débit variable et au fil de soleil tel que le stockage s’effectue indirectement sous forme d’eau dans un réservoir. L’objectif principal de ce travail est l’étude de la commande non linéaire par mode glissant des machines asynchrones.

6
2 4 5 6 3 1 3. Travaux achevés 3.1- Modélisation de la source photovoltaïque La constante de Planck h= Le facteur d’idéalité de la photopile n=1.72 La constante de Boltzmann KB=1.38*10-23 j/k La charge d’un électron q=1.602*10-19; Les modules existants au Technopole sont composés de Ncs= 36 cellules en silicium cristallin ce qui donne par module : Iph=3.85A et Vco=21V

7
2 4 5 6 3 1 3.2- MPPT de la source photovoltaïque La technique d'ajustement de la courbe forcer le GPV de fonctionner à leur point de puissance maximale.

8
2 4 5 6 3 1 3.3- Filtre passe bas Figure 2 : Le générateur photovoltaïque couplé a un condensateur

9
3.4 L’onduleur MLI autonome
2 4 5 6 3 1 3.4 L’onduleur MLI autonome Figure 3 : L’onduleur MLI Les expressions des tensions simples sont : Avec

10
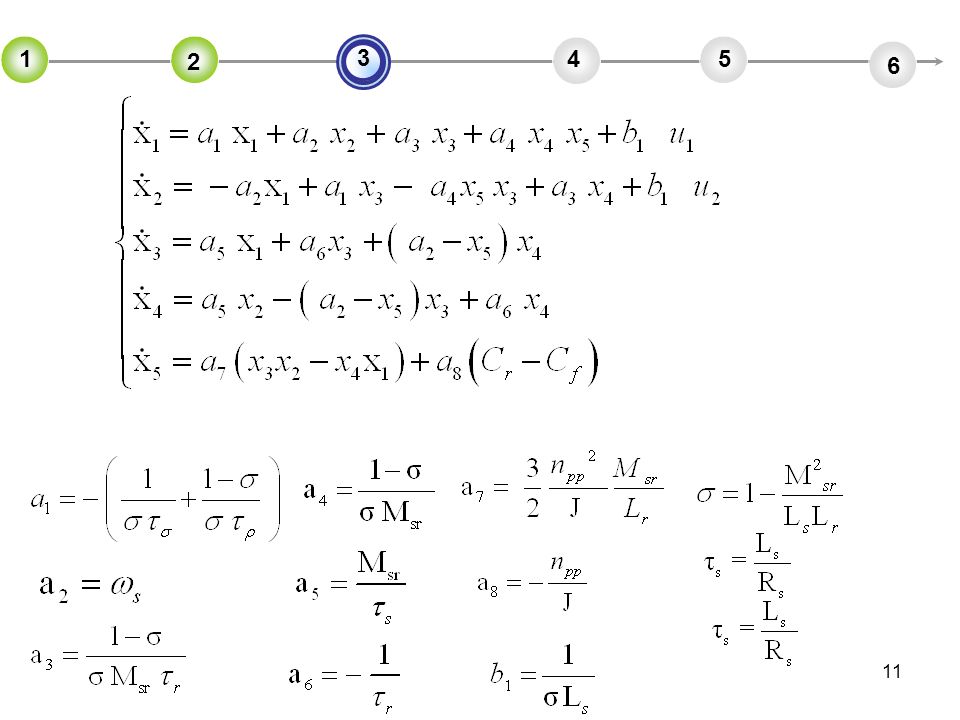
2 4 5 6 3 1 3.5 Le moteur asynchrone Le vecteur d’état Le vecteur de commande La vitesse de synchronisme La vitesse électrique du rotor La vitesse mecanique du rotor

11
2 4 5 6 3 1
12
L’expression du couple résistif défini par:
2 4 5 6 3 1 3.6 – La pompe centrifuge L’expression du couple résistif défini par: La constante de la pompe centrifuge vaut: L’expression du couple de frottement visqueux défini par : Avec F = Nm/rad/s

13
2 4 5 6 3 1 3.7. Application de la CMG La CMG permet de construire une commande U permettant de converger les sorties vers leurs valeurs de références en entraînant la surface de glissement S vers zéro. Le vecteur des erreurs de poursuite considéré est celui de la vitesse électrique de rotor et du carré du module de flux rotorique.

14
2 4 5 6 3 1 Equations différentielles régissant le mode glissant est donnée par: Ka, Kb: assurent la stabilité du système lorsqu’il est en mode glissant. La fonction de Lyapunov est définie par: Afin d’assurer le glissement du système lors de son premier passage par la surface S(X)=0 et pour assurer la stabilité du système, il suffit de verifier que la dérinée de la fonction de Lyapunov est négative quelque soit S(x) différent de zéro:
=0 et pour assurer la stabilité du système, il suffit de verifier que la dérinée de la fonction de Lyapunov est négative quelque soit S(x) différent de zéro:")
15
2 4 5 6 3 1 A partir de la dérivée de S(x), on détermine la loi de commande
, on détermine la loi de commande")
16
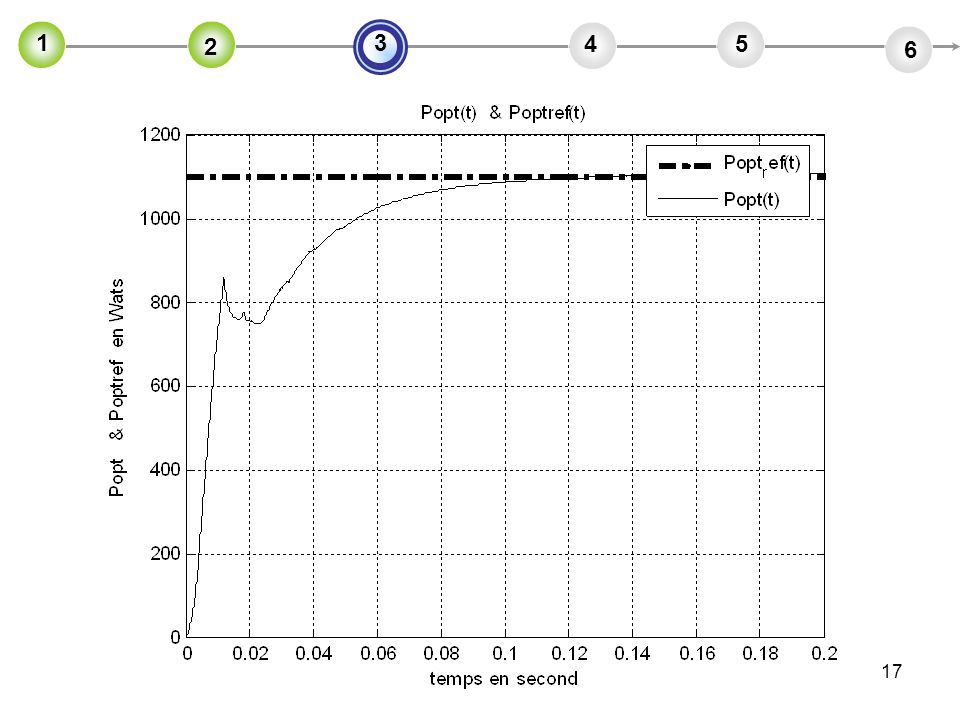
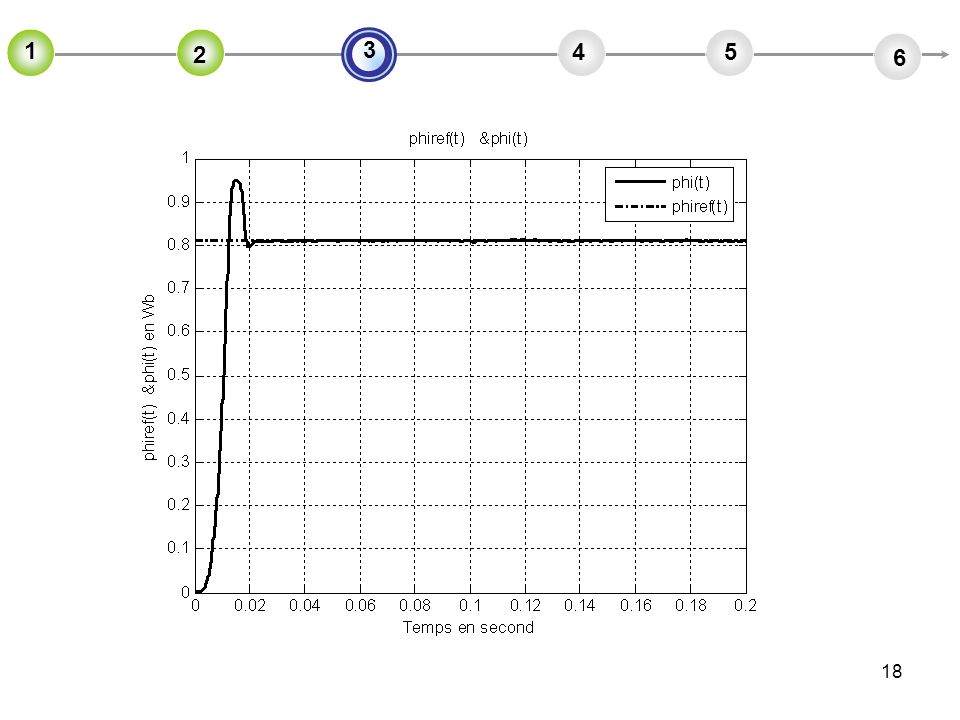
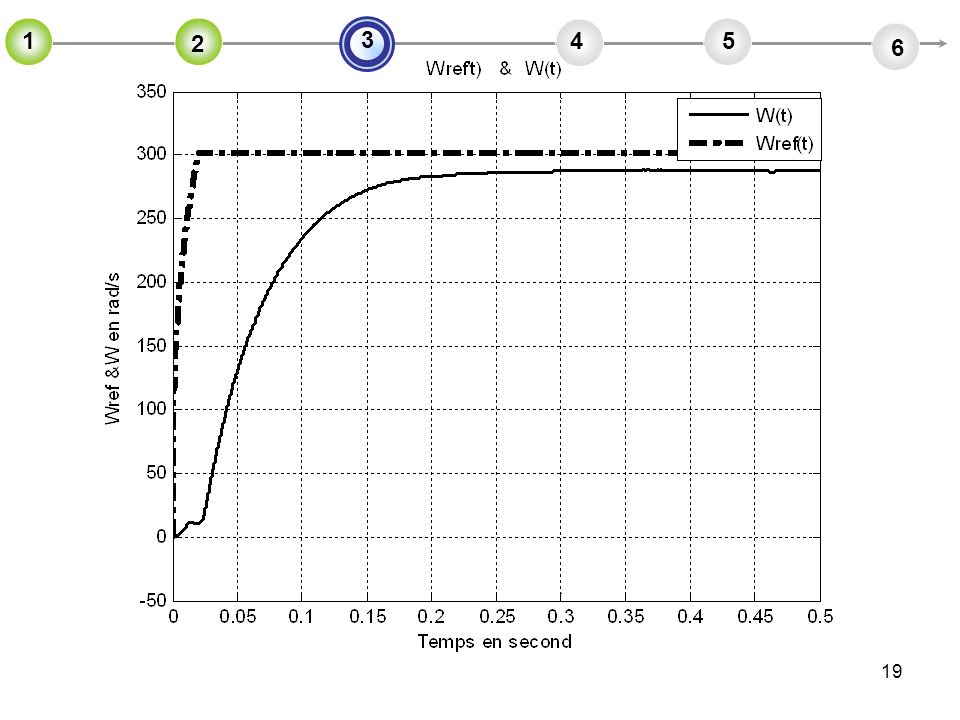
3.8 Résultats de simulation
2 4 5 6 3 1 3.8 Résultats de simulation Le GPV : Is=8,1 A Nms=30 E=648.5 W/m2 Nbp=1 h= q=1.602*10-19 C Ca= F T=300 K° KB=1.38*10-23 j/k Ncs=36 n=1.72 La motopompe asynchrone triphasée Pu =1Kw Ls= H Fv=0.004Nm/rad/s N=1440tr/min Lr= H Npp=2 Rs=8.87 ft=3500Hz Kch= *10-5 R=6.95 J=0.01Kg.m2 Msr= H

17
2 4 5 6 3 1
18
2 4 5 6 3 1
19
2 4 5 6 3 1
20
1 2 2 3 4 5 6 4. Travaux à réaliser Enfin, comme suite aux travaux présentés, nous proposons: L’utilisation des observateurs afin de déterminer toutes les grandeurs rotoriques nécessaires à la synthèse de lois de commande en mode glissant. Le changement de l’onduleur MLI sinus triangle par la MLI vectorielle pour améliorer le fonctionnement du système de pompage. un fonctionnement en MPPT moyennant la technique de la CMG. Une étude comparative entre la robustesse d’une commande vectorielle par orientation de flux rotorique et la CMG.

21
4. Projet des publications
1 2 3 2 4 2 2 5 6 4. Projet des publications Participation au JTEA’2008 Nous avons déjà préparé une proposition d’une communication au JTEA’2008, intitulée:Commande non linéaire par mode glissant d'état d'une motopompe asynchrone alimentée par un générateur GPV. Participation à l’ICEEDT’08 Un article validera bientôt les simulations de la comparaison entre la robustesse de la CMG et celle de la commande vectorielle par orientation de flux rotorique, Celle-ci devrait être achevée à la fin de février 2008.

22
2 1 3 4 5 6 6. Conclusion Bientôt, nous commençons la réalisation pratique au technopole. Fin.

23
Merci pour votre attention
شكرا Merci pour votre attention

Présentations similaires



















