Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

2
Moteur Asynchrone

3
Les moteurs électriques
De moins d'un kW, à plusieurs dizaines de MW, les Moteurs ASynchrones (MAS) équipent la majorité des machines-outils, monte-charges, tapis-roulants, compresseurs.. Le moteur asynchrone est utilisé quand on dispose d'une source d'alimentation alternative (réseau SONELGAZ triphasé ou monophasé).
 équipent la majorité des machines-outils, monte-charges, tapis-roulants, compresseurs.. Le moteur asynchrone est utilisé quand on dispose d une source d alimentation alternative (réseau SONELGAZ triphasé ou monophasé).")
4
Caractéristiques Le moteur asynchrone triphasé est largement utilisé dans l’industrie, sa simplicité de construction en fait un matériel très fiable et qui demande peu d’entretien. Il est constitué d’une partie fixe, le stator qui comporte le bobinage, et d’une partie rotative, le rotor qui est bobiné en cage d’écureuil. Les circuits magnétiques du rotor et du stator sont constitués d’un empilage de fines tôles métalliques pour éviter la circulation de courants de Foucault.

5
Généralités sur les moteur
Asynchrone

6
Symbole M 3 M 3 Ou M.A. à cage d’écureuil M.A. à rotor bobiné

7
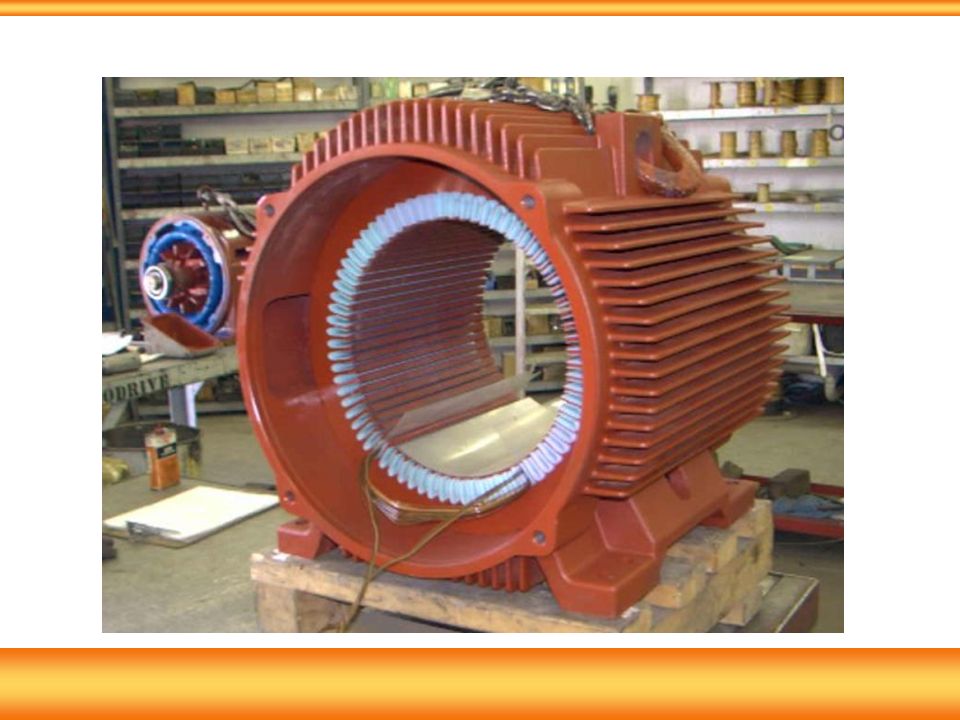
constitution Moteur asynchrone triphasé 1 : rotor :circuit magnétique tournant 2 : stator : circuit magnétique fixe + 3 enroulements 3 : plaque à bornes pour l’alimentation et le couplage.

9
constitution STATOR Il produit un champ magnétique tournant à la fréquence de rotation: ns en tr/s, ns=f / p f en Hz, p nombre de paires de pôles. Les enroulements du stator sont prévus pour être couplés, soit en étoile, soit en triangle. Le couplage des enroulements dépendra de la tension nominale par phase prévue pour le moteur et du réseau dont on dispose. Exemple: pour une tension nominale de 220 V supportable par un enroulement, il faut sur un réseau 220V/380 V faire un couplage étoile, et sur un réseau132V /230V faire un couplage triangle.

11
constitution ROTOR Deux types de rotors :
• rotor en cage d’écureuil où des bornes métalliques parallèles sont reliées par deux couronnes de faible résistance. • rotor bobiné où les conducteurs sont logés dans des encoches formant des enroulements triphasés ayant le même nombre de paires de pôles que le stator.

12
constitution ROTOR Rotor en cage d'écureuil Il porte un système de barres conductrices très souvent En aluminium, logées dans un empilement de tôles. Les Extrémités de ces barres sont réunies par des couronnes Également conductrices. On dit que le rotor est en court-circuit. L'ensemble n'est parcouru que par les Courants de Foucault induits par la rotation du champ statorique.

13
Principe de fonctionnement

14
Le triphasé Le réseau triphasé, est constitué de trois phases, d'un neutre et d'une terre, le tout cadencé à une fréquence de 50Hz. Phase 1 : L1 : v1 = Vmax sin wt Vmax = amplitude w=2pf Phase 2 : L2 : v2 = Vmax sin (wt - 2p/3) Phase 3 : L3 : v3 = Vmax sin (wt - 4p/3) On note V pour une tension simple On note U pour une tension composée
 Phase 3 : L3 : v3 = Vmax sin (wt - 4p/3) On note V pour une tension simple. On note U pour une tension composée.")
15
Le neutre Dans tout système de distribution triphasé (quatre fils),il existe un neutre électrique. Sa représentation géométrique est le centre de gravité du triangle équilatéral représentatif des trois phases. La tension entre une des phases et le neutre est appelée tension simple (220V) alors que la tension entre 2 phases est appelée tension composée (380V). Phase 1 : v1 = Vmax sin wt Phase 2 : v2 = Vmax sin(wt - 2p/3) Phase 3 : v3 = Vmax sin(wt - 4p/3) La phase Les phases sont les conducteurs chargés de véhiculer l'énergie vers le récepteur. Dans un récepteur triphasé équilibré, le courant circulant dans le neutre est nul, il n'existe que dans les phases. La tension de chaque phase est décalée de 120° degrés les unes par rapport aux autres. Réseau sonelgas 220/380 220V pour les tensions simples (monophasé) 380V pour les tensions composées (triphasé)
 alors que la tension. entre 2 phases est appelée tension composée (380V). Phase 1 : v1 = Vmax sin wt. Phase 2 : v2 = Vmax sin(wt - 2p/3) Phase 3 : v3 = Vmax sin(wt - 4p/3) La phase. Les phases sont les conducteurs chargés de véhiculer l énergie vers le récepteur. Dans un récepteur triphasé équilibré, le courant circulant dans le neutre est nul, il n existe que dans les phases. La tension de chaque phase est décalée de 120° degrés les unes par rapport aux autres. Réseau sonelgas 220/ V pour les tensions simples (monophasé) 380V pour les tensions composées (triphasé)")
16
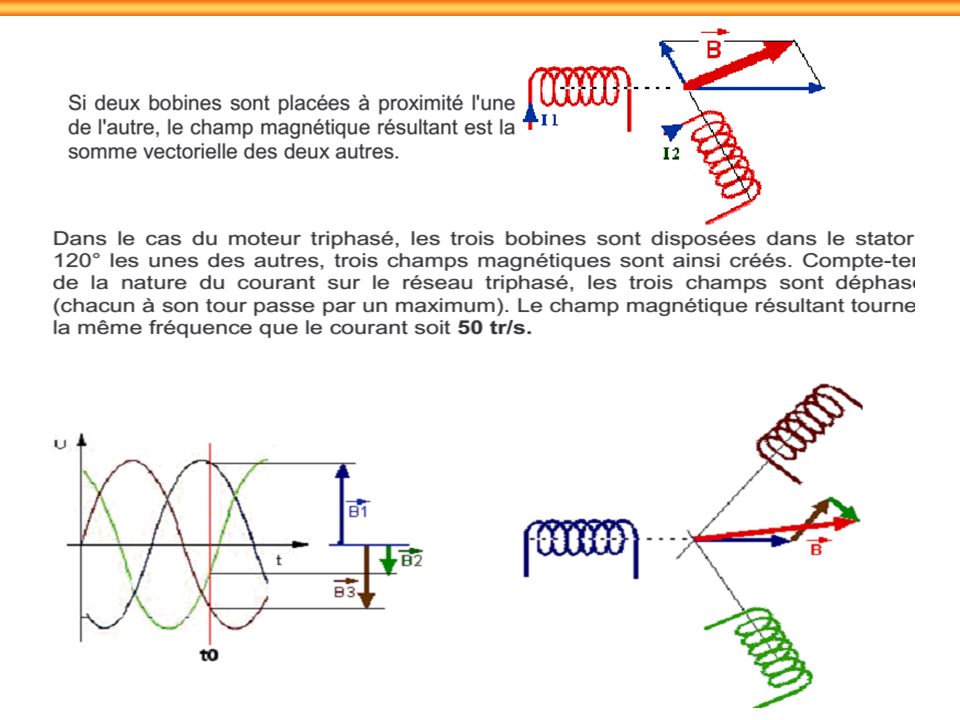
Le principe des moteurs à courant alternatifs réside dans l’utilisation d’un champ magnétique tournant produit par des tensions alternatives. La circulation d’un courant dans une bobine crée un champ magnétique B. ce champ est dans l’axe de la bobine, sa direction et son intensité sont fonction du courant I. c’est une grandeur vectorielle. Si le courant est alternatif, le champ magnétique varie en sens et en direction à la même fréquence que le courant.

18
Champ tournant Un ensemble de trois bobines identiques, disposées aux trois sommets d'un triangle équilatéral, et parcourues par des courants triphasés, produisent au centre géométrique un champ tournant à une vitesse égale à la pulsation des courants.

19
Positif Négatif

20
Positif Négatif

21
Positif Négatif

22
Positif Négatif Etc.…

24
Principe du moteur asynchrone triphasé
3 bobines forment une paire de pôles Une masse métallique (le rotor) est placée au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est tel que, par ses effets, il s’oppose à la cause qui lui donne naissance Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant Le rotor va tourner sensiblement à la même vitesse que le champ tournant
 est placée. au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est. tel que, par ses effets, il s’oppose à la cause qui. lui donne naissance. Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant. Le rotor va tourner sensiblement à la même vitesse que le champ tournant.")
25
Liaison électrique des barres Coulée d’aluminium
Rotor à cage d’écureuil Axes de rotation Barres de cuivre ou d’aluminium Circuit magnétique, empilage de feuilles d’acier doux Mais…. Comment le rotor peut tourner ???

27
Principe du moteur asynchrone triphasé
3 bobines forment une paire de pôles. Une masse métallique (le rotor) est placée au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est tel que, par ses effets, il s’oppose à la cause qui lui donne naissance. Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant. Le rotor va tourner sensiblement à la même vitesse que le champ tournant.
 est placée au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est tel que, par ses effets, il s’oppose à la cause qui lui donne naissance. Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant. Le rotor va tourner sensiblement à la même vitesse que le champ tournant.")
28
Si le moteur tourne en synchronisme avec le champ tournant, la vitesse relative entre le rotor et le champ tournant est NULLE. L’induction ne peut donc pas exister ! Le rotor tourne TOUJOURS moins vite que le champ tournant. De cette façon il est toujours balayé par le champ tournant et se transforme en une pièce magnétique. Ce qui donne le nom de moteur asynchrone Cette différence de vitesse s’appelle le glissement Équations Vitesse de synchronisme (le champ tournant) Glissement en % N, Ns = vitesse en tr.mn-1 P = Nombre de paire de pôles F = fréquence d’alimentation en Hz Le glissement est de l’ordre de 5%
 Glissement en % N, Ns = vitesse en tr.mn-1. P = Nombre de paire de pôles. F = fréquence d’alimentation en Hz. Le glissement est de l’ordre de 5%")
29
P = Nombre de paire de pôles
Une paire de pôles 2 paires de pôles 4 paires de pôles Si la fréquence d’alimentation est de 50Hz Ns = 3000 tr.mn-1 Ns = 1500 tr.mn-1 Ns = 750 tr.mn-1

30
Exercices : Un moteur de 2 pôles est alimenté en courant alternatif 50Hz Sa vitesse de synchronisme sera de : 2 pôles = 1 paire de pôles donc Ns = 3000tr.mn-1 Ce même moteur alimenté en 60Hz Ns = 3600tr.mn-1 Un moteur de 4 paires de pôles est alimenté en courant alternatif 50Hz puis en 60Hz Sa vitesse de synchronisme sera de : Avec un glissement de 5% sa vitesse réelle sera de : Ns = 750tr.mn-1 et Ns = 900tr.mn-1 N = 712tr.mn-1 et N = 855tr.mn-1 Un moteur de 1 paire de pôles est alimenté en courant alternatif 50Hz Sa vitesse réelle est de 2910 tr.mn-1 : Quel est son glissement ? Glissement = 3%

31
Plaque signalétique

32
Puissance utile délivrée sur l’arbre moteur Puissance réactive (absorbée) Pa=U.I V3 Cosf Couplage à effectuer en fonction du réseau Vitesse nominale (réelle) du rotor Intensité (dans chaque phase) correspondante Rendement h
 du rotor. Intensité (dans chaque phase) correspondante. Rendement h.")
33
exploitation : Puissance :(1,5Kw) puissance utile délivrée sur l’arbre du moteur. facteur de puissance :(0,78) permet le calcul de la puissance réactive consommée par le moteur (. Tensions : (230v/400v) la première indique la valeur nominale de la tension aux bornes d’un enroulement. Elle justifie le couplage (étoile ou triangle) à effectuer en fonction du réseau d’alimentation. Intensités :(6,65A/3,84A) Elles représentes l’intensité en ligne (dans chaque phase) pour chacun des couplages . rendement(rdt%76) : permet de connaître la puissance électrique consommée (on dit absorbée) vitesse :(1440 Tr/mn) Indique la vitesse nominale du rotor. On dit aussi vitesse réelle. On connait alors La vitesse de synchronisme ns du moteur (ici 1500 T/mn)
 permet le calcul de la puissance réactive consommée par le moteur (. Tensions : (230v/400v) la première indique la valeur nominale de la tension aux bornes d’un enroulement. Elle justifie le couplage (étoile ou triangle) à effectuer en fonction du réseau d’alimentation. Intensités :(6,65A/3,84A) Elles représentes l’intensité en ligne (dans chaque phase) pour chacun des couplages . rendement(rdt%76) : permet de connaître la puissance électrique consommée (on dit absorbée) vitesse :(1440 Tr/mn) Indique la vitesse nominale du rotor. On dit aussi vitesse réelle. On connait alors La vitesse de synchronisme ns du moteur (ici 1500 T/mn)")
34
Plaque signalétique

35
MOTEUR ASYNCHRONE en anglais : INDUCTION MOTOR
Type : RYCN 450 L/2 référence constructeur. N° 06A : N° de série 2007 : année de fabrication M 5000 kg : poids 480KW puissance mécanique utile sur l’arbre du moteur (½MW). cos φ 0,92 : facteur de puissance : permet le calcul de la puissance réactive consommée par le moteur. 2979 tr/min : Vitesse en tr.mn-1. Indique la vitesse nominale du rotor. On connait alors la vitesse de synchronisme ns du moteur ici 3000 tr.mn-1. IC CACA International Cooling : méthode et type de fluide pour le refroidissement. IM 1001 : Classification des formes de construction et des dispositions de montage. IP55 : Indice de protection, indique la résistance du moteur à la poussière et à l’eau. IEC : Norme : caractéristiques assignées et caractéristiques de fonctionnement.
. cos φ 0,92 : facteur de puissance : permet le calcul de la puissance réactive consommée par le moteur tr/min : Vitesse en tr.mn-1. Indique la vitesse nominale du rotor. On connait alors la vitesse de synchronisme ns du moteur ici 3000 tr.mn-1. IC CACA International Cooling : méthode et type de fluide pour le refroidissement. IM 1001 : Classification des formes de construction et des dispositions de montage. IP55 : Indice de protection, indique la résistance du moteur à la poussière et à l’eau. IEC : Norme : caractéristiques assignées et caractéristiques de fonctionnement.")
36
Temp. 40°C : température ambiante maximum sur le site d'exploitation.
S1: Régime de fonctionnement, S1 fonctionnement 24h/24 50HZ : Fréquence du réseau d’alimentation. Pour le Stator : 11 000V Tension nominale d'alimentation 28.3A : Intensité nominale. Y couplage en étoile. (Δ pour un couplage en triangle) 3~ : Moteur triphasé. CI F : Classe d'isolation (échauffement maximal admissible 105°) ∆T 80K : Echauffement maximal admissible 80° S'ajoute des informations sur le graissage.
 3~ : Moteur triphasé. CI F : Classe d isolation (échauffement maximal admissible 105°) ∆T 80K : Echauffement maximal admissible 80° S ajoute des informations sur le graissage.")
37
BRANCHEMENT

38
Branchement étoile ou triangle
Il y a deux possibilités de branchement du moteur au réseau électrique triphasé. Le montage en étoile et le montage en triangle. Avec un branchement en étoile, la tension au bornes de chacune des bobines est d’environ 220V. Dans le montage en triangle, chacune des bobines est alimentée avec la tension nominale du réseau (380V). On utilise le montage étoile si un moteur de 220V doit être relié sur un réseau 380V ou pour démarrer un moteur à puissance réduite dans le cas d’une charge avec une forte inertie mécanique.
. On utilise le montage étoile si un moteur de 220V doit être relié sur un réseau 380V ou pour démarrer un moteur à puissance réduite dans le cas d’une charge avec une forte inertie mécanique.")
39
Branchement étoile ou triangle
Il y a deux possibilités de branchement du moteur au réseau électrique triphasé. Le montage en étoile (D) et le montage en triangle (Y). Avec un branchement en étoile, la tension aux bornes de chacune des bobines est d'environ 230V. Dans le montage en triangle, chacune des bobines est alimentée avec la tension nominale du réseau (400V). On utilise le montage étoile si un moteur de 230V doit être relié sur un réseau 400V ou pour démarrer un moteur à puissance réduite dans le cas d'une charge avec une forte inertie mécanique.
 et le montage en triangle (Y). Avec un branchement en étoile, la tension aux bornes de chacune des bobines est d environ 230V. Dans le montage en triangle, chacune des bobines est alimentée avec la tension nominale du réseau (400V). On utilise le montage étoile si un moteur de 230V doit être relié sur un réseau 400V ou pour démarrer un moteur à puissance réduite dans le cas d une charge avec une forte inertie mécanique.")
40
Ce moteur doit être branché obligatoirement en étoile en France
Réseau Français 230V/400V Ce moteur doit être branché obligatoirement en étoile en France car la tension bobine est de 230V 400V

41
Ce moteur doit être branché en triangle en Angleterre
Réseau Anglais 110V/220V Ce moteur doit être branché en triangle en Angleterre car la tension bobine est de 220V S’il est branché en étoile il sera sous alimenté 220V

42
Lecture de la plaque signalétique d ’un moteur asynchrone triphasé
KW 15 LEROY SOMER LS 200L 725 tr/min Kg 175 Cl. F T = 80 K IP 555 50 Hz V 230 / 400 A / 17.6 cos 0.8 Rend. 88%

43
Marque du constructeur Référence du constructeur
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER

44
Classe de température : échauffement possible
Masse du moteur asynchrone Indice de protection : contre les corps solides contre les corps liquides contre les chocs mécaniques LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER ces points seront développés dans le cours de Technologie

45
Puissance mécanique que le moteur délivre au point de fonctionnement nominal.
Cette valeur nominale sert de point de départ pour les ingénieurs qui doivent concevoir ce moteur KW 15 LEROY SOMER LS 200L 725 tr/min Kg 175 Dans les conditions nominales, l ’axe du moteur asynchrone tournera à la fréquence de rotation de 725 tr/min ( fréquence de rotation dite nominale ). Cl. F T = 80 K IP 555 50 Hz V 230 / 400 A / 17.6 cos 0.8 Rend. 88%
. Cl. F T = 80 K. IP Hz. V 230 / 400. A 30.5 / cos 0.8. Rend. 88%")
46
Attention, va falloir être précis !!!
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Attention, va falloir être précis !!!

47
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Dans les conditions nominales, le moteur doit être alimenté par un réseau triphasé - de fréquence 50 Hz de tension efficace composée U = 230 V de tension efficace composée U = 400 V OU BIEN 1 2 3 N 1 2 3 N U = 230 V U = 400 V

48
Je peux faire ce que je veux ? Cela m ’étonnerait fort !!!
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Je peux faire ce que je veux ? Cela m ’étonnerait fort !!! Peut-être qu’il faut faire attention au couplage ( étoile ? triangle ? ) …
 …")
49
TRIANGLE ETOILE U = 400 V U = 230 V
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Pour un réseau 230V, je dois coupler le moteur en ... Pour un réseau 400V, je dois coupler le moteur en ... TRIANGLE ETOILE 1 2 3 N U = 400 V 1 2 3 N U = 230 V I = 30.5 A I = 17.6 A La valeur efficace d ’un courant de ligne vaut alors ... La valeur efficace d ’un courant de ligne vaut alors ... 30.5 A pour le fonctionnement nominal 17.6 A pour le fonctionnement nominal

50
Moi aussi ! J ’ai raison ! Réseau 230V: couplage TRIANGLE Réseau 400V:
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Réseau 230V: couplage TRIANGLE Réseau 400V: couplage ETOILE Moi aussi ! J ’ai raison !

51
Les enroulements et donc le
1 2 3 N U = 230 V TRIANGLE ETOILE U = 400 V I = 30.5 A I = 17.6 A Les enroulements et donc le moteur fonctionnent dans les mêmes conditions ! Pour un réseau 230V, Pour un réseau 400V, Chaque enroulement supporte une tension composée de valeur efficace 230 V ... Chaque enroulement supporte une tension simple de valeur efficace U = V / 3 = 230 V ... et est traversé par un courant d ’intensité efficace J = I /3 = 30.5/ 3 = 17.6 A et est traversé par un courant de ligne d ’intensité efficace I = 17.6 A.

52
QUE RETENIR ??? Valeur efficace d ’une tension COMPOSEE
LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Valeur efficace d ’une tension COMPOSEE Valeur efficace d ’un courant de LIGNE Pour se rappeler : la plus petite valeur de tension doit être la valeur efficace de la tension que supporte un enroulement

53
Facteur de puissance nominal
Pour finir ... LS 200L KW 15 Kg 175 50 Hz Cl. F T = 80 K IP 555 725 tr/min V 230 / 400 A / 17.6 cos 0.8 Rend. 88% LEROY SOMER Facteur de puissance nominal est le déphasage de la tension aux bornes d ’un enroulement par rapport au courant traversant ce même enroulement Rendement nominal puissance mécanique utile puissance active reçue par le moteur

54
Bilan des puissances

55
2. Bilan des puissances 2.1 Puissance reçue ou absorbée ( consommée )
P = UI cosφ cos φ : facteur de puissance du moteur. P ( en W ) ; U ( en V ) ; I ( en A ). A vide, cos φ est faible et Pv = Pfs + Pméc + Pjs Pjs à vide peuvent être négligées 2.2 Pertes au stator Pour un moteur en charge : Pjs et Pfs : ce sont les pertes par effet Joule et les pertes fer ( magnétiques ) au stator. Les pertes fer dépendent de la valeur efficace de la tension aux bornes des enroulements et de la fréquence du réseau. r : résistance d’un enroulement entre le neutre et la En étoile : Pjs = 3rI2 = RI phase; R : résistance entre deux bornes de phase du stator. En triangle : Pjs = 3rJ2 = RI J : courant par phase ; I : courant en ligne.
 ; U ( en V ) ; I ( en A ). A vide, cos φ est faible et Pv = Pfs + Pméc + Pjs Pjs à vide peuvent être négligées. 2.2 Pertes au stator. Pour un moteur en charge : Pjs et Pfs : ce sont les pertes par effet Joule et les pertes fer ( magnétiques ) au stator. Les pertes fer dépendent de la valeur efficace de la tension aux bornes des enroulements. et de la fréquence du réseau. r : résistance d’un enroulement entre le neutre et la. En étoile : Pjs = 3rI2 = RI2 phase; R : résistance entre deux bornes de phase du stator. En triangle : Pjs = 3rJ2 = RI2 J : courant par phase ; I : courant en ligne.")
56
2.3 Puissance transmise au rotor
Puissance transmise au rotor : Ptr ( en W ) T : Couple électromagnétique ( en N.m ) Ωs : Vitesse de synchronisme ( rad/s ) 2.4 Puissance transmise à l’arbre du rotor et pertes au rotor. Pr : puissance transmise à l’arbre du rotor. Pr = TΩ Le rotor tourne à la vitesse Ω, vitesse du moteur asynchrone et développe le couple électromagnétique T. Les pertes électriques au niveau du rotor sont les pertes par effet Joule : Pjr. Les pertes fer rotor Pfr sont négligeables. Ptr = P - Pfs - Pjs = T Ωs Pjr = g Ptr
 T : Couple électromagnétique ( en N.m ) Ωs : Vitesse de synchronisme ( rad/s ) 2.4 Puissance transmise à l’arbre du rotor et pertes au rotor. Pr : puissance transmise à l’arbre du rotor. Pr = TΩ Le rotor tourne à la vitesse Ω, vitesse du moteur asynchrone et développe le. couple électromagnétique T. Les pertes électriques au niveau du rotor sont les pertes par effet Joule : Pjr. Les pertes fer rotor Pfr sont négligeables. Ptr = P - Pfs - Pjs = T Ωs. Pjr = g Ptr.")
57
2.5 Puissance utile et pertes mécaniques
Pu : puissance utile ; Tu : couple utile. Les pertes mécaniques sont dues aux frottements et sont fonction de la vitesse. 2.6 Rendement d’un moteur asynchrone Pjs = 3/2 RI Pjr = g Ptr Réseau Entrefer Arbre P = √3UIcosφ Stator Ptr = TΩs Rotor Pr = ( 1-g)Ptr Pu = TuΩ Pfs Pméc Si on néglige (Pfs et Pjs ) : Ptr = P Pr = Ptr - Pjr = (1 – g ) Ptr = ( 1 – g ) P Si on néglige Pméc : Pr = Pu Pu = Pr = ( 1 – g)P ηmax = = 1 - g Pu = Tu Ω Pméc = Pr - Pu = ( T - Tu ) Ω
Ptr Pu = TuΩ. Pfs Pméc. Si on néglige (Pfs et Pjs ) : Ptr = P Pr = Ptr - Pjr = (1 – g ) Ptr = ( 1 – g ) P. Si on néglige Pméc : Pr = Pu Pu = Pr = ( 1 – g)P ηmax = = 1 - g. Pu = Tu Ω. Pméc = Pr - Pu = ( T - Tu ) Ω.")
58
3. Caractéristiques mécaniques. Point de fonctionnement
3.1 Caractéristique mécanique Tu = f( Ω ) Tu ( en N.m ) Tu max Tud Tun Ωn Ωs Ω ( en rad/s ) g = g = 0 Pour Ω = Ωs , g = ? Tu = 0 N.m : fonctionnement à vide Pjr = g Ptr = ? Pour Ω = 0 , g = ? Le moment du couple utile : Tu = Tud qui n’est pas nul. Le moteur présente à l’arrêt ( Ω = 0 ) un couple important.
 Tu ( en N.m ) Tu max. Tud. Tun. 0 Ωn Ωs Ω ( en rad/s ) g = 1 g = 0. Pour Ω = Ωs , g = Tu = 0 N.m : fonctionnement à vide Pjr = g Ptr = Pour Ω = 0 , g = Le moment du couple utile : Tu = Tud qui n’est pas nul. Le. moteur présente à l’arrêt ( Ω = 0 ) un couple important.")
59
Liaison avec le réseau Le moteur est relié au réseau par un certain nombre de dispositifs de sécurité et de commande. SECTIONNEUR CONTACTEUR RELAIS THERMIQUE

60
SECTIONNEUR - PORTE FUSIBLES
permet d'isoler un circuit pour effectuer des opérations de maintenance, de dépannage ou de modification sur les circuits électriques CONTACTEUR appareil de commande capable d'établir ou d'interrompre le passage de l'énergie électrique (commandé à distance par l’alimentation de la bobine KM1) RELAIS THERMIQUE appareil de protection capable de protéger contre les surcharges (élévation anormale du courant consommé par le ou les récepteurs :1 à 3 In).
 RELAIS THERMIQUE. appareil de protection capable de protéger contre les surcharges (élévation anormale du courant consommé par le ou les récepteurs :1 à 3 In).")
61
Liaison avec le réseau EDF L’alimentation de la bobine KM1 du contacteur est assurée par le « circuit de commande »

62
Disjoncteur

63
Sectionneur porte fusible
Ne possède pas de pouvoir de coupure Les contacts principaux permettent d'assurer le sectionnement de l'installation, c'est une fonction de sécurité obligatoire. Les contacts auxiliaires permettent de couper le circuit de commande des contacteurs avant l'ouverture des pôles du sectionneur ce qui évite la coupure en charge. De même à la mise sous tension, le circuit de commande n'est fermé qu'après la fermeture des pôles du sectionneur. La poignée de commande peut-être verrouillée en position ouverte par un cadenas (sécurité opérateur pour la maintenance).
.")
64
Contacteur de puissance
possède un fort pouvoir de coupure (symbolisé par « l’excroissance ») Le contacteur est commandé à distance au moyen d’une bobine, Le contacteur est un appareil mécanique de connexion ayant une seule position repos, commandé autrement qu'à la main, capable d'établir, de supporter et d'interrompre des courants dans les conditions normales du circuit, y compris les conditions de surcharge en service. Un contacteur dont les contacts principaux sont fermés dans la position de repos est appelé rupteur.
 Le contacteur est commandé à distance au moyen d’une bobine, Le contacteur est un appareil mécanique de connexion ayant une seule position repos, commandé autrement qu à la main, capable d établir, de supporter et d interrompre des courants dans les conditions normales du circuit, y compris les conditions de surcharge en service. Un contacteur dont les contacts principaux sont fermés dans la position de repos est appelé rupteur.")
65
Relais thermique

66
Fusibles

67
Commande d’un moteur asynchrone

68
Commande d’un moteur asynchrone

69
Commande d’un moteur asynchrone

70
Commande d’un moteur asynchrone

71
Commande d’un moteur asynchrone

72
Variateur de vitesse Le moteur asynchrone a sa vitesse définie par : Le nombre de paires de pôles (défini à la fabrication) La fréquence d’alimentation 50Hz en France… Pour permettre une utilisation plus universelle le variateur va permettre de fournir une tension triphasée de fréquence comprise entre 0.5 et 400HZ. Il permet : D’avoir des vitesses variables. Réaliser des démarrages arrêts inversions du sens de rotation progressifs. De régler des rampes d’accélérations ou ralentissements. De moduler le courant pour moduler le couple. De faire varier la tension pour l’adapter à la fréquence ( tension faible en basse fréquence, et plus haute en haute fréquence u/f=constant).
.")
73
Courbes idéalisées

74
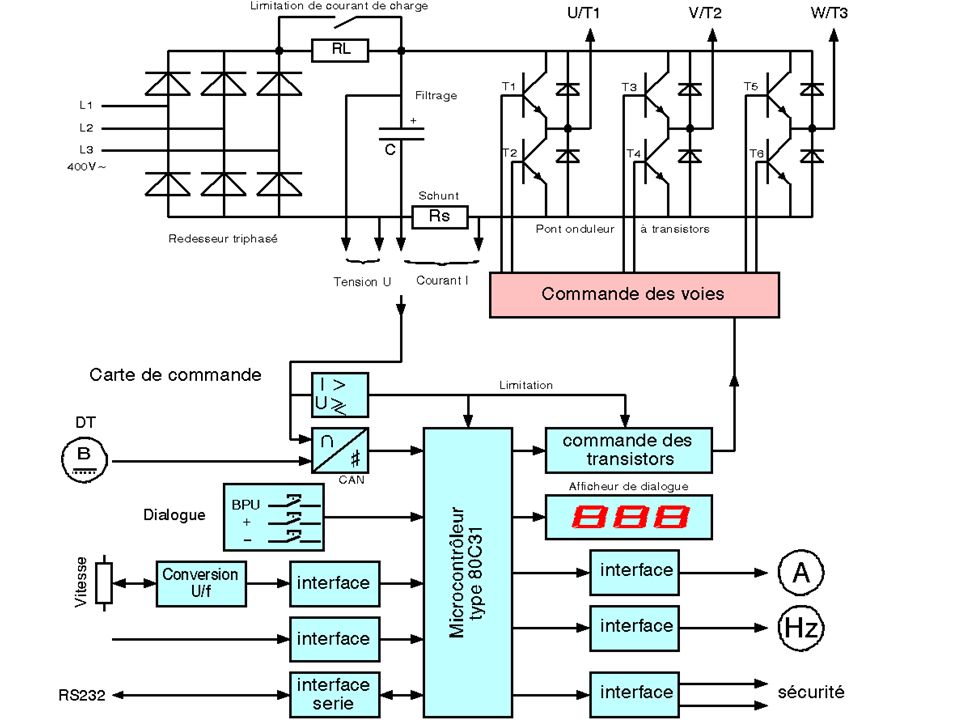
Variateur de vitesse principe
Filtrage Redresseur triphasé onduleur Stator du moteur Le moteur est conçu pour fonctionner à 50Hz. Le variateur permet de synthétiser une fréquence d’alimentation de 0.5Hz à 400Hz. En basse vitesse se pose le problème du refroidissement du moteur. En haute fréquence, l’effet inductif est plus important, le courant est plus faible, le couple est nettement inférieur au couple nominal.

75
à t = 0 i1 = im/2 i2 = -im i3 = im/2

76
à t = T/6 i1 = im i2 = -im/2 i3 = -im/2

77
à t = T/3 i1 = im/2 i2 = im/2 i3 = -im

78
à t = T/2 i1 = -im/2 i2 = im i3 = -im/2

79
à t = 2T/3 i1 = -im i2 = im/2 i3 = im/2

80
à t = 5T/6 i1 = -im/2 i2 = -im/2 i3 = im

Présentations similaires