3. Trajectoire (suite) - Calcul de l’abscisse curviligne - Vecteur normal - Rayon de courbure - Trièdre de Frenet p. 15 à 18
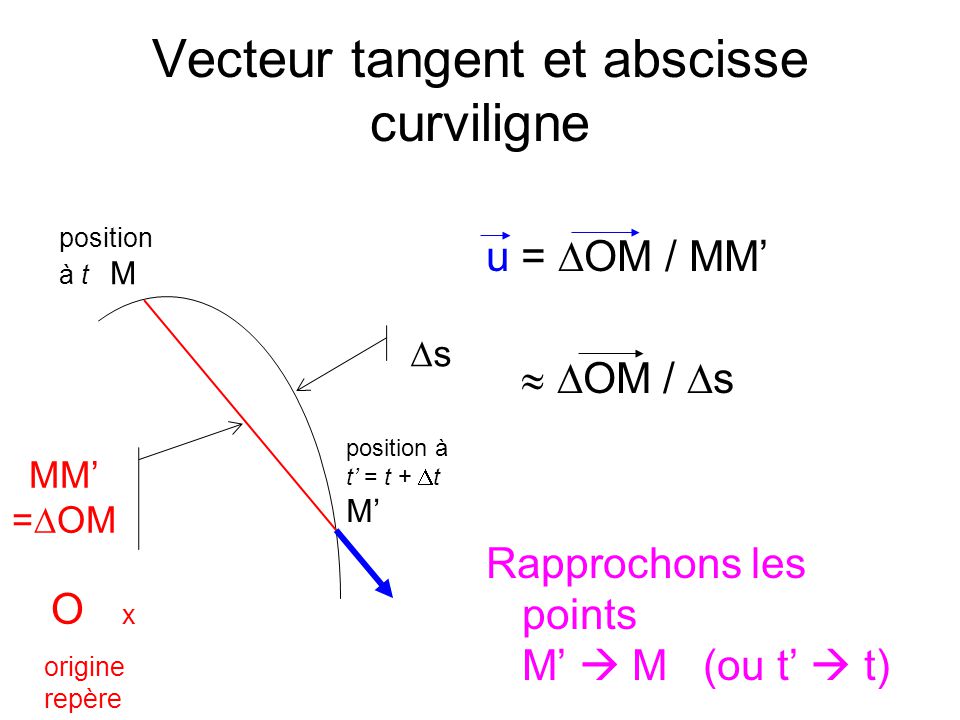
Vecteur tangent et abscisse curviligne position à t M position à t’ = t + t M’ s MM’ =OM u = OM / MM’ OM / s Rapprochons les points M’ M (ou t’ t) O x origine repère
Vecteur tangent et abscisse curviligne (2) lim u = lim OM / s = dOM/ds Sur le graphe cette limite est le vecteur tangent T = dOM/ds t0 M M’ s MM’ =OM T
Abscisse curviligne et vitesse T = T(s) avec s fonction de t t s(t) OM(s) s OM
Abscisse curviligne et vitesse vitesse instantanée [ norme de v(M) ] = dérivée de l’abscisse curviligne (car norme vecteur T = 1 …)
Calcul de l’abscisse curviligne M0M1 = Exemple : x(t) = t y(t) = 1 + t² t0 = 0 t t1 = 2s z(t) = (4/3) t3/2 …... M0M1 = 6 m (en m)
Vecteur normal à la trajectoire 3 points de la trajectoire M M’ et M'' (à t, t+dt, et t – dt) forment le plan osculateur (P) (…relatif à M, donc P n’est pas un plan fixe : son inclinaison varie avec t)
plan osculateur et trajectoire position M2 position M1 Si trajectoire 2D, (P) = plan de la trajectoire
Vecteur normal à la trajectoire (2) le plan osculateur contient M et M’ donc T (P) défini par T et N le vecteur normal tel que: N T N dirigé à l’intérieur de la trajectoire (T, N) = π/2 ou (T, N) = – π/2
Vecteur normal à la trajectoire (3) v(M) T N T N +π/2 – π/2
Calcul du vecteur normal N =+ dT / d (1) (d angle OM’ OM) - Plus utile sous la forme N = (2)
Calcul du vecteur normal (2) Cas frequent de trajectoire 2D : T = Tx i + Ty j supposé connu. or N.T =0 NxTx + NyTy = 0 N = – Ty i + Tx j angle = +pi/2 N = Ty i – Tx j angle = -pi/2
Rayon de courbure RC = rayon du cercle qui tangente la trajectoire dans le plan osculateur au voisinage de M
M trajectoire Rc Centre du cercle : dans prolongement du vecteur normal
Calcul du rayon de courbure Dans le plan (P) , au voisinage de M, mouvement équivalent à un mouvement circulaire de rayon Rc : Vitesse linéaire de M = rayon x |vit. angulaire| || v(M) || = Rc × || = = ||dT/dt|| || v(M) || = Rc × || dT/dt ||
Relation vecteur tangent, vecteur normal, et rayon de courbure A partir de N = et On obtient
Le rayon de courbure permet de caractériser les trajectoires Trajectoire à Rc constant : en 2D, cercle (Rc = R) en 3D ? hélice, mvt sur sphère Rc cas limite mvt rectiligne
Trièdre de Frenet Troisième vecteur, appelé binormale B = T N angle T,N = + π/2 B (π) , vers le haut angle T,N = – π/2 B (π) , vers le bas π : plan osculateur (M, T, N, B) = trièdre de Frenet repère local, associé à R0
Programme Matlab (tracé courbe 3D+ rayon de courbure t=[0:0.1:2]; x=1+t; y=t.^2; z=4/3*t.^(3/2); plot3(x,y,z, 'r-o'); grid; rotate3d on Rc=(1+2*t).^3./sqrt(4*t+1./t+4); figure(2) plot(t,Rc,'b-o');grid
TD2 : exos 4,5,6,7
Calcul du rayon de courbure (3) Si vecteur accélération connu || v(M) || 3 Rc = || v(M) a(M) || exemple :