Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Pterois volitans RASCASSE Volante

2
Réalisation d’Analyseurs de Surface d’onde pour le Contrôle de miroirs Actifs Spatiaux sur Source Etendue

3
Contexte, positionnement et Objectifs o Etude Système complète o Etude et développement des analyseurs SH / φdiv. o Intégration sur le banc MADRAS / Couplage o Tests, validations et exploitation des mesures Contexte de l’Observation de la Terre : Source Etendue, défilement.. Intérêts du LAM - Suite et complément à MADRAS - Positionnement comme acteur majeur Optique Active Spatiale - Renforcement des liens avec nos partenaires (TAS, ONERA..) - Préparation de missions d’exploration planétaire
 - Préparation de missions d’exploration planétaire.")
4
Contexte, positionnement et Objectifs Expertises complémentaires des participants Planning LAM en parallèle avec la fin du programme MADRAS o KO décembre 2012 - OK o Durée 16 mois o Démarrage WP LAM : To + 2 mois (Février 2012) o Ressources @ LAM o Equipe R&D/Madras + OA WFS o 12 mois CDD IE o 12 mois Post-doc (Marion MAS – WFS)
 o LAM o Equipe R&D/Madras + OA WFS o 12 mois CDD IE o 12 mois Post-doc (Marion MAS – WFS)")
5
MADRAS Démonstrateur de miroir correcteur pour télescope spatial Absence de gravité + variation de température: perte de la forme optimale des grands miroirs Insertion d’un Miroir Déformable Multimode dans le train optique pour compenser ces défauts Spécifications Correction des 10 premières aberrations optiques avec une précision meilleure que 5 nm rms Précision globale < 10 nm rms Contraintes spatiales: Encombrement et poids minimum Faible consommation Tenue mécanique Fiabilité et efficacité Wave-front coming from the telescope (distorted) Wave-front corrected by the mirror deformation Push/Pull actuators deforming the optical surface Amplitude max (nm rms -WFE) Coma3200,0 Astig3150,0 Sphe350,0 Tref530,0 Astig530,0 Tetraf730,0 Tref730,0 Pentaf930,0 Tetraf930,0 Pentaf1130,0 Exemple de déformation attendue et besoin en correction
 Wave-front corrected by the mirror deformation Push/Pull actuators deforming the optical surface Amplitude max (nm rms -WFE) Coma3200,0 Astig3150,0 Sphe350,0 Tref530,0 Astig530,0 Tetraf730,0 Tref730,0 Pentaf930,0 Tetraf930,0 Pentaf1130,0 Exemple de déformation attendue et besoin en correction")
6
MADRAS: design Dimensionnement du système par Analyse Elément Finis Optimisation de la géométrie pour minimiser les résidus et les contraintes dans le matériau Zérodur Pupille: Φ 90 mm, épaisseur 3 mm Diamètre total 130 mm 24 actionneurs pour corriger les aberrations spécifiées Pied central pour générer l’aberration sphérique et tenir le système Caractérisation Modes propres Comportement mécanique: localisation des contraintes maximum Spécifications actionneurs: course, force et précision nécessaires

7
MADRAS: performances Correction efficace des Zernike 7 modes dans les spécifications Génération de sphérique légèrement moins précise (pied central) Pentafoil plus problématique (symétrie) Correction de front d’onde représentatif Combinaison aléatoire des modes Statistique sur 1000 tirages Précision attendue: 8.6 nm rms Actionneur mort Perte de fonctions d’influence pour la décomposition Dégradation importante des performances => Besoin de redondance
 Pentafoil plus problématique (symétrie) Correction de front d’onde représentatif Combinaison aléatoire des modes Statistique sur 1000 tirages Précision attendue: 8.6 nm rms Actionneur mort Perte de fonctions d’influence pour la décomposition Dégradation importante des performances => Besoin de redondance")
8
MADRAS: intégration CAO miroir intégré Miroir Plaque de référence Actionneur et embout actionneur Cône central Dispositif de Fixation du Miroir

9
MADRAS: testing Image non corrigée Image corrigée Source DM: génération front d’onde perturbé Emplaceme nt MADRAS ASO1: commande DM ASO2: commande MADRAS

10
Banc MADRAS @ LAM o B1 – Génération de perturbations type o B2 - Pilotage du miroir actif MADRAS

11
Banc MADRAS @ LAM o Mesure interféro. directe miroir MADRAS o Comparaison images avant/après corrections

12
Banc MADRAS / Modifications pour RASCASSE étendue o Modification de la source (1 à 2° défil.) o Boucle avec SH + Cam φdiv. SH grand champ φdiv.

13
MADRAS: statut actuel Tous les composants sont approvisionnés et installés Pré-alignement de la totalité du chemin optique effectué Qualification de la 1 ère boucle d’OA en cours

14
MADRAS: testing Image non corrigée Image corrigée Source DM: génération front d’onde perturbé Emplaceme nt MADRAS ASO1: commande DM ASO2: commande MADRAS

15
15 MADRAS: statut actuel IHM RTC boucles MADRAS et Téléscope terminé. validation fonctionnelle en cours Electronique de commande livrée et interfacée qualification des actionneurs et de leur électronique avec un palpeur (sonde millitron) - OK Calibration finale de la 1 ère boucle d’OA Calibration des aberrations sur la 2 ième partie du banc flatening, etc.. Installation de la partie Fizeau (début 2012)
 - OK Calibration finale de la 1 ère boucle d’OA Calibration des aberrations sur la 2 ième partie du banc flatening, etc.. Installation de la partie Fizeau (début 2012).")
16
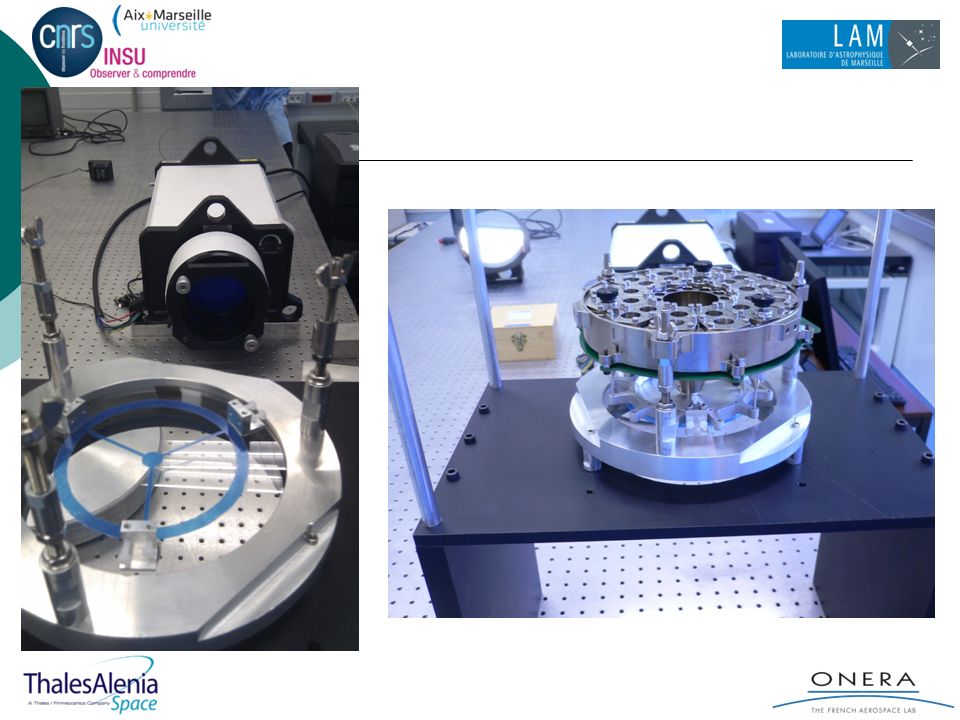
Intégration Intégration en classe 10000 Différentes étapes d’intégration définies: Nettoyage des pièces - OK Intégration du miroir sur l’outillage - OK Assemblage de l’ensemble plaque de référence - OK Intégration - Démarrage lundi 9/12 du cône des actionneurs des DFMs 16

20
Organisation projet o WP1 : Système TAS Spécifications / Suivi / Synthèse finale o WP2 : Shack-Hartman SE ONERA Simulations / Design / Réalisation / Dépouillement o WP3 : Phase diversité TAS Simulations / Design / Réalisation / Dépouillement o WP4 : Expérimentation LAM Conception / Adaptation / Réalisations/ Tests o WP5 : Coordination TAS Projet / Suivi / Documentation

21
Organisation projet

Présentations similaires