Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Les appareils de mesure inertielle dans l’analyse du mouvement humain

2
Les appareils traditionnels de mesure du mouvement 3D (Électrogoniométrie) Lamoreux, LW, 1971, Kinematic Measurements in the Study of Human Walking, Bul. Prosth. Res. BPR 10-15

3
Les appareils d’aujourd’hui sont beaucoup moins encombrants mais demeurent encore des outils de laboratoire. (Vicon, MotionAnalysis)
.")
4
Mesure expérimentale 6 caméras VICON Mcam2 (120Hz); tapis roulant à 2 voiesl ADAL; Système Physilog (3D acc, 3D gyros)
; tapis roulant à 2 voiesl ADAL; Système Physilog (3D acc, 3D gyros)")
5
Système d’analyse du mouvement

6
Inverse Dynamic Modeling Approach
ith Segment i+1th segment F M

7
Avantages des appareils optoélectroniques
Ils fournissent les positions 3D par rapport à un repère fixe globale. Ils sont précis ( environ 200 micro-mètres)
")
8
Désavantage des appareils optoélectroniques
Nécessité du calibrage lors des dispositions des caméras Volume de mesure statique En général ils ne fonctionnent pas en temps-réel

9
Unité inertielle La mesure inertielle est un système qui combine des accéléromètres 3D, des gyroscopes 3D ainsi que des magnetomètres 3D Physilog, BioAGM, MTI - Xsens ADPM – 8Gb/ 720h Dynamic accuracy 2.80 deg

10
Unité inertielle Monitorage des activités de la vie quotidienne
Estimation de l’énergie dépensé quotidiennement Mesure de la cinématique articulaire et du corps entier Estimation des charges par inverse dynamique

11
Unité inertielle : Monitorage de l’activité physique quotidienne
Un moyen efficace pour la mesure objective du mouvement humain dans un contexte de mouvement non contraint Le monitorage de différent type de mouvement (marche, transfert assis-debout, équilibre postural, descente d’escalier chutes, etc…) Permet l’identification et la classification des activités physiques par monitorage continue
 Permet l’identification et la classification des activités physiques par monitorage continue.")
12
Unité inertielle Goniomètre (mesure les angles inter-segmentaires)
Accéléromètre (mesure l’accélération linéaire et le mouvement d’un segment) Gyroscope (mesure l’orientation ou la vitesse angulaire d’un segment) Contacteur électromécanique (mesure le temps entre 2 contacts talons succéssifs) Podomètre (mesure le nombre de pas) Actimètre (mesure la quantité ou le pourcentage d’activité physique)
 Gyroscope (mesure l’orientation ou la vitesse angulaire d’un segment) Contacteur électromécanique (mesure le temps entre 2 contacts talons succéssifs) Podomètre (mesure le nombre de pas) Actimètre (mesure la quantité ou le pourcentage d’activité physique)")
13
Avantage Peu couteux Mesure effectuée en dehors du contexte du laboratoire ou de la clinique Ils répondent bien en fréquence et en intensité du mouvement Permettent la mesure de l’inclinaison grâce à la mesure de l’axe gravitationnel

14
ActiGraph, RT3, TricTrac-3D

15
Consommation en courant
L’accéléromètre de type iMEMS consomment environ de à 0.7 mA alors que le gyroscope en consomme beaucoup plus de 3.5 à 6.0 mA.

16
ADXL322

17
Modèle des capteurs inertiels Sabatini. Review. Sensors, 2011.

18
Vitesse angulaire estimé par l’axe de rotation instantanné Aissaoui et al., IEEE-EMBS2004

19
Comparison between accelerometer and optoelectronic system
Comparison between accelerometer and optoelectronic system. Aissaoui et al IEEE-ISIE

20
How to filter noise ? Three categories
Filtering in time domain Filtering in frequency domain Filtering in time-frequency domain

21
Comparative studies There is no powerful method that works for every biomechanical situation Comparison of filtering techniques have always been done on a single marker i.e. the rigidity constraint of rigid body is not taken into account Difficulty in automatisation of the algorithms Walker JA. (1998). Estimating velocities and accelerations of animal locomotion : a simulation experiment comparing numerical differentiation algorithms. The Journal of Theoretical Biology, 201: Wachowiak MP. et al. (2000). Wavelet-based noise removal for biomechanical signals: A comparative study. IEEE Trans. on Biomedical Eng., vol 47(2): Nagano A et al. (2003). Optimal digital filter cut-off frequency of jumping kinematics evaluated through computer simulation. Int. J. Health Res, 1(2): Alonso FJ. et al. (2004). Automatic filtering procedure for processing biomechanical kinematic signals. Lecture Notes in Computer Science, 3337:
. Estimating velocities and accelerations of animal locomotion : a simulation experiment comparing numerical differentiation algorithms. The Journal of Theoretical Biology, 201: Wachowiak MP. et al. (2000). Wavelet-based noise removal for biomechanical signals: A comparative study. IEEE Trans. on Biomedical Eng., vol 47(2): Nagano A et al. (2003). Optimal digital filter cut-off frequency of jumping kinematics evaluated through computer simulation. Int. J. Health Res, 1(2): Alonso FJ. et al. (2004). Automatic filtering procedure for processing biomechanical kinematic signals. Lecture Notes in Computer Science, 3337:")
22
Purpose of this work is to compare three automatic methods with and without the rigidity constraints
Autocorrelation method (AC) Power spectral density method (PSA) Singular spectrum analysis (SSA)
 Power spectral density method (PSA) Singular spectrum analysis (SSA)")
23
AC method

24
PSA method Signal series S
AR modeling using modified covariance algorithm Estimating power spectrum using FFT of the AR coefficient (Wiener-Khintchin identity) Estimating the power of the noise Average of 80 to 100% of the power spectrum Determination of the frequency fc at which the power is lower than the previous average calculation Use of butterworth filter at fc
 Estimating the power of the noise. Average of 80 to 100% of the power spectrum. Determination of the frequency fc at which the power. is lower than the previous average calculation. Use of butterworth filter at fc.")
25
SSA method Let S be a signal of length N, and let L represents a window length. The first step is to construct a Hankel matrix from the original signal by sliding a window with length L. Singular value decomposition of H H = UDWT

26
Derivatives calculation
Method-1 : central difference Method-2: using the angular velocity calculation

27
Results Acceleration measured and calculated from raw data without filtering in three axis (m/s2)
")
28
comparing PSA, AC and SSA for method-2

29
Estimation de l‘orientation avec les UI sans les capteurs de mouvement
Strap-down integration method (SDI) : gyroscope + quaternion algebra Fusion algorithm using selective orientation correction method SOC : gyroscope + accelerometer Fusion algorithm using Kalman filtering : gyroscope + accelerometer + magnetometer + sensor modeling.
 : gyroscope + quaternion algebra. Fusion algorithm using selective orientation correction method SOC : gyroscope + accelerometer. Fusion algorithm using Kalman filtering : gyroscope + accelerometer + magnetometer + sensor modeling.")
30
General fusion algorithm Roentenberg et al
General fusion algorithm Roentenberg et al. 2003, International Symposium on Mixed and Augmented Reality (ISMAR ’03)
")
31
Erreur typique due au drift en utilisant la méthode SDI et SOC Favre, PhD Dissertation , EPFL 2008

32
Contrôle du drift en utilisant le filtre de kalman Roentenberg et al
Contrôle du drift en utilisant le filtre de kalman Roentenberg et al. 2003, International Symposium on Mixed and Augmented Reality (ISMAR ’03)
")
33
Application

34
Mesure cinématique Cinématique de la marche Dynamique de la marche
Paramètre Spatio-temporels (durée du cycle, cadence, pahse de simple et double support; longueur de pas et de foulée ) Déplacement articulaire (2D/3D) Dynamique de la marche Moment de réaction à l’épaule.
 Déplacement articulaire (2D/3D) Dynamique de la marche. Moment de réaction à l’épaule.")
35
Utilisation de l’accéléromètre durant la marche
Saunders, J., Inman, V. and Eberhart, H., The major determinants in normal and pathological gait. Journal of Bone and Joint Surgery - American Volume 35, Morris, J. R. W., Accelerometry - Technique for measurement of human body movements. Journal of Biomechanics 6,

36
Temporal parameters (wavelet analysis) Aminian et al. J. Biomech, 2002.
10 ms delay between HS as compared with foot- switch

37
2D kinematics model Aminian et al. J.Biomech, 2002.
Errors for velocity and stride length estimations were equal to 0.06 m/s and 0.07 m respectively

38
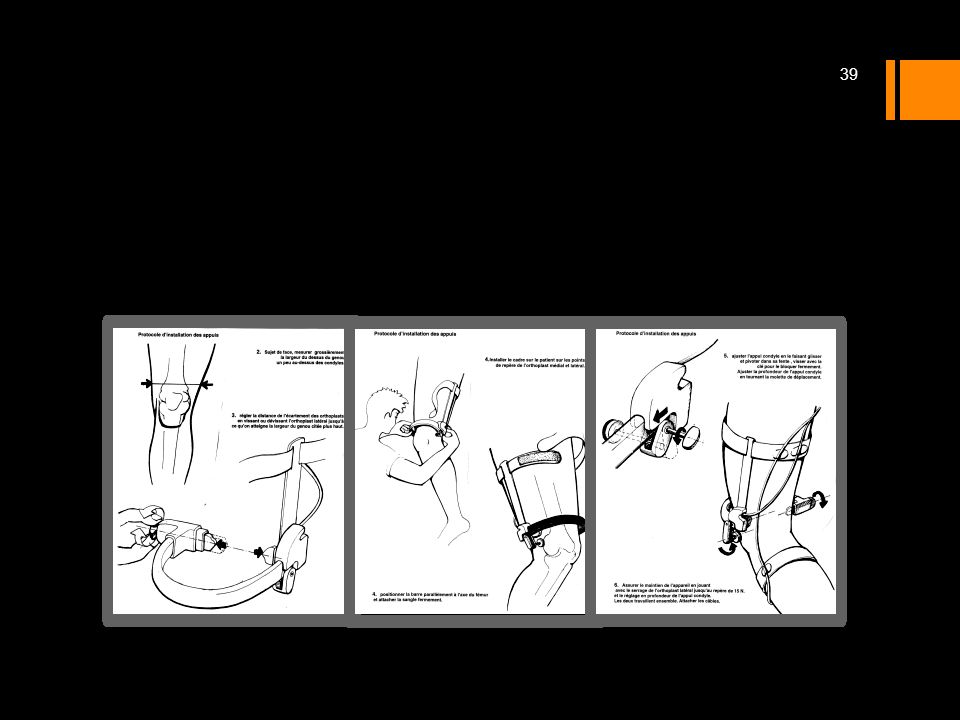
Knee joint angular measurement Hagemeister et al. J. Biomech (2005)
Optoélectronique (Optotrack 3020) Magnétique (FastTrack,Polhemus) Vidéo (VICON) Physilog
 Magnétique (FastTrack,Polhemus) Vidéo (VICON) Physilog.")
40
Knee Motion Analyser System using functional calibration system
Anatomical coordinate system Joint Coordinate System (Groot & Suntay) Body-coordinate system
 Body-coordinate system.")
41
Knee 3D Inertial Measurement system Favre, Aissaoui et al. J
Knee 3D Inertial Measurement system Favre, Aissaoui et al. J. Biomech (2009)
")
42
Results of the functional calibration method using IMU Favre, Aissaoui, et al. J. Biomech (2009)
Syst. Lyberty (électromagnétique) Syst. Inertiel Physilog (Acc, gyro)
 Syst. Inertiel Physilog (Acc, gyro)")
43
Repeatability & Accuracy

44
Travail actuel de Perrine F (MSc.)
")
45
Travail actuel de Perrine F (MSc.)
")
46
Shoulder moment estimation during wheelchair propulsion system Aissaoui et al. (2006)
Infra-red markers Inertial System Handrim reaction forces

47
Generic inverse dynamics

48
Results (solid red : IMU; black dashed optoelectronic)
Flx/Ext Add/Abd Int/Ext Mz

49
relative peak error (%)
Results Flx/Ext Add/Abd Int/Ext rms (Nm) 2.57 2.78 2.23 rms_peak (Nm) 4.40 5.09 4.54 relative peak error (%) 24.4 51.01 49.32
 rms_peak (Nm) relative peak error (%)")
50
Conclusion Les UI sont un excellent outil pour le monitorage de l’activité physique en dehors du laboratoire et du milieu clinique. La répétabilité peut-être considérée comme bonne dans certains cas de mesure

Présentations similaires






![[number 1-100].](/1/172887/big_thumb.jpg "[number 1-100].>")









.>")


