Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Automatisation

2
Plan du premier cours Présentation du plan de cours
Plan du cours Présentation du plan de cours Buts de l'automatisation Structure d'un automatisme Spécifications d'un automatisme Les technologies d’un automatisme Buts Structure Spécifications Technologies

3
Buts de l’automatisation
Plan du cours Buts Buts de l’automatisation Structure Spécifications Pourquoi automatiser ? AFCET: Association Française pour la Cybernétique Économique et Technique Outils méthodes: GRAFCET GEMMA Technoguides Technologies

4
Buts de l'automatisation
Plan du cours Élimination de tâches répétitives ou sans intérêt Lavage du linge ou de la vaisselle Simplifier le travail de l'humain Toute une séquence d’opérations remplacée par l’appui sur un poussoir Augmenter la sécurité Éviter les erreurs (aboutissant parfois à des catastrophes) inévitables dans un travail répétitif. Buts Structure Spécifications Technologies
 inévitables dans un travail répétitif. Buts. Structure. Spécifications. Technologies.")
5
Buts de l'automatisation
Plan du cours Proposer aux hommes des tâches valorisantes Au lieu de chargement / déchargement de pièces sur une MCN, offrir la possibilité de la contrôler voire programmer. Accroître la productivité Cadence de production soutenue Pas de fatigue Économiser les matières premières et l'énergie Production plus efficace Buts Structure Spécifications Technologies

6
Buts de l'automatisation
Plan du cours Superviser les installations et les machines Vérifier l’état de fonctionnement de la machine et prévenir si une maintenance est nécessaire Augmentation de la disponibilité Buts Structure Spécifications Automatisation : A consommer avec modération ! Technologies

7
Structure d’un automatisme
Plan du cours Buts Structure d’un automatisme Structure Tel que définit par l ’AFCET * pour ses outils méthodes. Spécifications AFCET: Association Française pour la Cybernétique Économique et Technique Outils méthodes: GRAFCET GEMMA Technoguides Technologies * Association Française pour la Cybernétique Économique et Technique, renommé en Association Française des Sciences et Technologies de l'Information et des Systèmes. Association créée en 1968 et dont l'objectif est d'aider aux développements de ces nouvelles techniques.

8
Schéma de la structure PARTIE RELATION PARTIE PARTIE COMMANDE
Plan du cours PARTIE RELATION Buts SIGNALISATION CONSIGNES Structure Spécifications ORDRES INFORMATIONS Technologies ORDRES ACTIONNEURS PARTIE PARTIE COMMANDE OPÉRATIVE INFORMATIONS CAPTEURS

9
La Partie Commande Automates programmables Séquenceurs
Plan du cours Automates programmables Séquenceurs (électromécaniques ou pneumatiques) Microcontrôleurs Cartes dédiées ... C O Buts Structure Spécifications Les signaux sont de basse puissance, par exemple, le signal de sortie d’un automate est incapable de faire fonctionner directement un moteur de 550 V 3 phases consommant 12 Ampères. C’est via un contacteur qui est un pré-actionneur que la chose est possible. Technologies Les signaux sont de basse puissance, par exemple, le signal de sortie d’un automate est incapable de faire fonctionner directement un moteur de 550 V 3 phases consommant 12 Ampères. C’est via un contacteur qui est un pré-actionneur que la chose est possible.
 Microcontrôleurs. Cartes dédiées. ... C. O. Buts. Structure. Spécifications. Les signaux sont de basse puissance, par exemple, le signal de sortie d’un automate est incapable de faire fonctionner directement un moteur de 550 V 3 phases consommant 12 Ampères. C’est via un contacteur qui est un pré-actionneur que la chose est possible. Technologies. Les signaux sont de basse puissance, par exemple, le signal de sortie d’un automate est incapable de faire fonctionner directement un moteur de 550 V 3 phases consommant 12 Ampères. C’est via un contacteur qui est un pré-actionneur que la chose est possible.")
10
La Partie Opérative Moteurs électriques (C.A. ou C.C.)
Plan du cours C O Moteurs électriques (C.A. ou C.C.) Vérins pneumatiques ou hydrauliques Vannes (électriques ou pneumatiques) Éléments chauffants ... Buts Structure Spécifications Technologies
 Vérins pneumatiques ou hydrauliques. Vannes (électriques ou pneumatiques) Éléments chauffants. ... Buts. Structure. Spécifications. Technologies.")
11
La Partie Relation Panneaux de commande (Pupitre)
Plan du cours Panneaux de commande (Pupitre) Voyants, indicateurs Poussoirs, sélecteurs Interfaces Homme-Machine Alarmes C O Buts Structure Spécifications Technologies
 Voyants, indicateurs. Poussoirs, sélecteurs. Interfaces Homme-Machine. Alarmes. C. O. Buts. Structure. Spécifications. Technologies.")
12
Ces trois parties comprennent…
Plan du cours Des fonctions ou organes binaires. Des fonctions de logique combinatoire. Des fonctions de logique séquentielle. Buts Structure ? Spécifications Technologies

13
La logique combinatoire
Plan du cours Définition: L'état logique des sorties est UNIQUEMENT fonction de l'état des entrées Applications: Circuits de sécurité et de verrouillage Systèmes séquentiels simples Méthode de résolution: Tables de Karnaugh ou de Mahoney Buts Structure Spécifications Technologies

14
La logique séquentielle
Plan du cours Définition: L'état logique des sorties est fonction de l'état des entrées et du passé système (système à mémoire) Applications: Toutes tâches de nature séquentielle Méthodes de résolution: Méthode basée sur la logique combinatoire Méthodes intuitives (géométriques) GRAFCET Buts a a Structure A F Spécifications Technologies
 Applications: Toutes tâches de nature séquentielle. Méthodes de résolution: Méthode basée sur la logique combinatoire. Méthodes intuitives (géométriques) GRAFCET. Buts. a. a. Structure. A. F. Spécifications. Technologies.")
15
Spécifications d’un automatisme
Plan du cours Buts Spécifications d’un automatisme Structure Spécifications Les spécifications d’un automatise sont importantes car elles permettent de définir les besoins du client. Technologies

16
Les constats de l’AFCET
Plan du cours 1) La partie opérative est bien optimisée Obligation de résultat Technologies des actionneurs évoluent lentement Formation bien rodée à ces technologies Buts Structure Spécifications Technologies
 La partie opérative est bien optimisée. Obligation de résultat. Technologies des actionneurs évoluent lentement. Formation bien rodée à ces technologies. Buts. Structure. Spécifications. Technologies.")
17
Les constats de l’AFCET
Plan du cours 2) La partie commande est mal optimisée Technologies des systèmes de commande évoluent rapidement Choix de technologies préférées Suivit de modes ... Buts Structure Spécifications Technologies
 La partie commande est mal optimisée. Technologies des systèmes de commande évoluent rapidement. Choix de technologies préférées. Suivit de modes. ... Buts. Structure. Spécifications. Technologies.")
18
Spécifications d'un automatisme
Plan du cours Les tâches de l'automaticien sont: de comprendre le « PROBLEME » posé dans son contexte, de concevoir des solutions envisageables, de choisir (avec les clients) la solution à implanter. Ses missions sont définies par un contrat. Ses outils sont: Le GRAFCET Le GEMMA Les TECHNOGUIDES Buts Structure Spécifications Technologies
 la solution à implanter. Ses missions sont définies par un contrat. Ses outils sont: Le GRAFCET. Le GEMMA. Les TECHNOGUIDES. Buts. Structure. Spécifications. Technologies.")
19
Le cahier des charges Plan du cours C’est un contrat entre le client et le fournisseur. Il définit les clauses: Juridiques responsabilités, accidents,... Commerciales Prix, Garanties, … Financières Techniques Buts Structure Spécifications Technologies

20
Spécifications d'un automatisme
Plan du cours Cahier des Charges Buts techniques Structure Spécifications fonctionnelles Spécifications Spécifications technologiques Spécifications opérationnelles Technologies

21
Les spécifications techniques
Plan du cours Fonctionnelles: Description du comportement de la partie commande vis-à-vis de la partie opérative et du monde extérieur. On ne préjuge en aucune façon des technologies qui seront mises en œuvre. Exemple, pour ouvrir une benne on a le choix entre les technologies: - mécanique: ensemble de levier et de tringles; - électromécanique: dispositif avec électro-aimant; - électrique: moteur; - pneumatique: vérin. Ce choix technologique n’est pas fait ici. S’il faut ouvrir la benne, on mentionne simplement « Ouvrir la benne ». Outil correspondant: Le GRAFCET Buts Structure Spécifications On y précise: - les fonctions que doivent assurer la partie opérative, les action à effectuer et leur enchaînement. - Les conditions de sécurité de fonctionnement si elle ne dépendent pas de la technologie des capteurs et des actionneurs. Exemple, pour ouvrir une benne on à le choix entre les technologies: - mécanique: ensemble de levier et de tringles; - électromécanique: dispositif avec électro-aimant; - électrique: moteur; - pneumatique: vérin. Ce choix technologique n’est pas fait ici. Si il faut ouvrir la benne, on mentionne simplement « Ouvrir la benne ». Technologies

22
Le GRAFCET Graphe de Commande Étape-Transition
Plan du cours Graphe de Commande Étape-Transition Représentation graphique du fonctionnement d'un automatisme. Spécifications fonctionnelles: Choix des Fonctions Commandes et Informations Sécurités Buts Structure Spécifications Technologies

23
Les spécifications techniques
Plan du cours Technologiques: Précise la façon dont va se faire les échanges entre la partie commande et la partie opérative et le monde extérieur. Choix de matériel. On y précise: - comment sont réalisées les actions dans la pratique; - la nature exacte des capteurs et des actionneurs à utiliser ainsi que leurs caractéristiques; - l ’interface doit être spécifiée, la nature des signaux et leur caractère physique sont donnés tant pour les capteurs que pour les actionneurs. - les contraintes de l’environnement de l’automatisme au cours de l ’exploitation (température, humidité, milieu déflagrant, poussière, …) - la façon dont va se faire le dialogue avec l ’extérieur. Exemples: pour une installation de manutention de sable, les capteurs sont de type étanche et la benne sera ouverte et fermée par un vérin pneuatique. Outil correspondant: Les Technoguides Buts Structure Spécifications On y précise: - comment sont réalisée les actions dans la pratique; - la nature exacte des capteurs et des actionneurs à utiliser ainsi que leurs caractéristiques; - l ’interface doit être spécifiée, la nature des signaux et leur caractère physique sont donnés tant pour les capteurs que pour les actionneurs. - les contraintes de l’environnement de l’automatisme au cours de l ’exploitation (température, humidité, milieu déflagrant, poussière, …) - La façon dont va se faire le dialogue avec l ’extérieur. Exemples: pour une installation de manutention de sable, les capteurs sont de type étanche et la benne sera ouverte et fermée par un vérin. Technologies
 - la façon dont va se faire le dialogue avec l ’extérieur. Exemples: pour une installation de manutention de sable, les capteurs sont de type étanche et la benne sera ouverte et fermée par un vérin pneuatique. Outil correspondant: Les Technoguides. Buts. Structure. Spécifications. On y précise: - comment sont réalisée les actions dans la pratique; - la nature exacte des capteurs et des actionneurs à utiliser ainsi que leurs caractéristiques; - l ’interface doit être spécifiée, la nature des signaux et leur caractère physique sont donnés tant pour les capteurs que pour les actionneurs. - les contraintes de l’environnement de l’automatisme au cours de l ’exploitation (température, humidité, milieu déflagrant, poussière, …) - La façon dont va se faire le dialogue avec l ’extérieur. Exemples: pour une installation de manutention de sable, les capteurs sont de type étanche et la benne sera ouverte et fermée par un vérin. Technologies.")
24
Les TECHNOGUIDES Plan du cours Outil servant à la sélection de technologies de commande adéquates. Spécifications technologiques: Définition du matériel: Technologie de la partie commande Capteurs et Actionneurs Buts Structure Spécifications Technologies

25
Les spécifications techniques
Plan du cours Opérationnelles: Se rapportent au fonctionnement de l’automatisme au cours de l’exploitation. Les spécifications opérationnelles mettent en évidence les conditions nécessaires: - au bon maintient de la fiabilité; - à l’élimination des pannes dangereuses; - aux possibilités de modification de l ’équipement; - à la facilité d ’entretient; - à la qualité du dialogue homme-machine. Exemples: une signalisation lumineuse placée à proximité du tas de sable pour informer le personnel que l ’accès à cette zone est dangereux lorsque le chargement de la trémie à commencé. Outil correspondant: Le GEMMA Buts Structure Spécifications Les spécifications opérationnelles mettent en évidence les conditions nécessaires: - au bon maintient de la fiabilité; - à l’élimination des pannes dangeureuses; - aux possibilités de modification de l ’équipement; - à la facilité d ’entretient; - à la qualité du dialogue homme-machine. Exemples: une signalisation lumineuse placée à proximité du tas de sable pour informer le personnel que l ’accès à cette zone est dangereux lorsque la chargement de la trémie à commencé. Technologies

26
Le GEMMA Guide d'Étude des Modes de Marches et d'Arrêts
Plan du cours Guide d'Étude des Modes de Marches et d'Arrêts Représentation graphique des divers états de fonctionnement, d'arrêt et de défaillance d'un automatisme. Spécifications opérationnelles: Fiabilité, Disponibilité, Maintenance Dialogue homme-machine Buts Structure Spécifications Technologies

27
Les technologies des automatismes
Plan du cours Buts Il faut connaître certains des éléments de base des 4 grandes technologies utilisées dans les automatismes. Structure Electro-mécanique Spécifications Pneumatique Hydraulique Technologies Électronique

28
Technologies des automatismes
Un automatisme est composé: de FONCTIONS LOGIQUES Combinatoires et séquentielles. d’ORGANES BINAIRES (en entrée et en sortie) Soit ACTIONNÉS (1) Soit INACTIONNÉS (0)
 Soit ACTIONNÉS (1) Soit INACTIONNÉS (0)")
29
Technologies des automatismes
Les organes binaires mettent en jeu une GRANDEUR PHYSIQUE: Soit PRÉSENTE (1) Soit ABSENTE (0)
 Soit ABSENTE (0)")
30
Les 4 grandes technologies
ÉLECTROMÉCANIQUE Grandeur physique: Courant électrique. Organes binaires: Contacts électriques. PNEUMATIQUE Grandeur physique: Pression d’air. Organes binaires: Distributeurs, vérins. HYDRAULIQUE Grandeur physique: Pression d’huile. Organes binaires: Distributeurs, vérins. ÉLECTRONIQUE Grandeur physique: Différence de potentiel avec la masse. Organes binaires: Transistors, Triacs.

31
P O P C P D Unité de production Actionneurs Capteurs Pré-Actionneurs
Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

32
Réalise des transformations sur les matières d’œuvre P O P C P D
Unité de production Actionneurs Capteurs P C Pré-Actionneurs Réalise des transformations sur les matières d’œuvre Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

33
Ex. : Vérins, Moteurs électriques
P O Unité de production Actionneurs Capteurs P C Pré-Actionneurs Apporte à l’unité de production l’énergie nécessaire à son fonctionnement d’une source d’énergie externe (et interne dans certain cas) Ex. : Vérins, Moteurs électriques Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels
 Ex. : Vérins, Moteurs électriques. Interfaces de sortie. Interfaces d ’entrée. Unité de traitement. Interfaces de sortie. Interfaces d ’entrée. P. D. Visualisations. Avertisseurs. Capteurs. manuels. ")
34
Ex. : Capteurs de pression, de présence
Unité de production Actionneurs Capteurs P C Pré-Actionneurs Créent, à partir d ’information de nature différente (température, position, …) des informations utilisables par la partie commande Ex. : Capteurs de pression, de présence Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels
 des informations utilisables par la partie commande. Ex. : Capteurs de pression, de présence. Interfaces de sortie. Interfaces d ’entrée. Unité de traitement. Interfaces de sortie. Interfaces d ’entrée. P. D. Visualisations. Avertisseurs. Capteurs. manuels. ")
35
Ex. : Distributeurs, Contacteurs
P O Unité de production Actionneurs Capteurs P C Pré-Actionneurs Dépendent directement des actionneurs et sont nécessaires à leur fonctionnement (démarreur pour un moteur, distributeur pour un vérin, …) Ex. : Distributeurs, Contacteurs Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels
 Ex. : Distributeurs, Contacteurs. Interfaces de sortie. Interfaces d ’entrée. Unité de traitement. Interfaces de sortie. Interfaces d ’entrée. P. D. Visualisations. Avertisseurs. Capteurs. manuels. ")
36
P O Unité de production Actionneurs Capteurs P C Pré-Actionneurs Transforment les informations issues des capteurs de la P.O. ou de la P.D. en informations de nature et d ’amplitude compatibles avec l ’API Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

37
P O Unité de production Actionneurs Capteurs P C Pré-Actionneurs Transforment les informations issues de l ’API en informations de nature et d ’amplitude compatibles avec les caractéristiques technologiques des pré-actionneurs et avertisseurs Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

38
P O Unité de production Actionneurs Capteurs P C Pré-Actionneurs Interfaces de sortie Interfaces d ’entrée Unité de traitement Élabore des ordres destinés aux actionneurs en fonction des informations reçues des différents capteurs et du fonctionnement à réaliser Ex. : API, Séquenceur Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

39
Ex. : Colonnes lumineuses
P O Unité de production Actionneurs Capteurs Transforment les informations fournies par l ’API en informations perceptibles par l ’homme. Ex. : Colonnes lumineuses P C Pré-Actionneurs Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels

40
Ex. : bouton poussoir : arrêt d’urgence
Unité de production Transforment les informations fournies par l ’homme (action manuelle sur un bouton, par exemple) en informations exploitables par l ’API. Ex. : bouton poussoir : arrêt d’urgence Actionneurs Capteurs P C Pré-Actionneurs Interfaces de sortie Interfaces d ’entrée Unité de traitement Interfaces de sortie Interfaces d ’entrée P D Visualisations Avertisseurs Capteurs manuels
 en informations exploitables par l ’API. Ex. : bouton poussoir : arrêt d’urgence. Actionneurs. Capteurs. P. C. Pré-Actionneurs. Interfaces de sortie. Interfaces d ’entrée. Unité de traitement. Interfaces de sortie. Interfaces d ’entrée. P. D. Visualisations. Avertisseurs. Capteurs. manuels. ")
41
Technologie ÉLECTROMÉCANIQUE
Éléments de cette technologie

42
Technologie ÉLECTROMÉCANIQUE
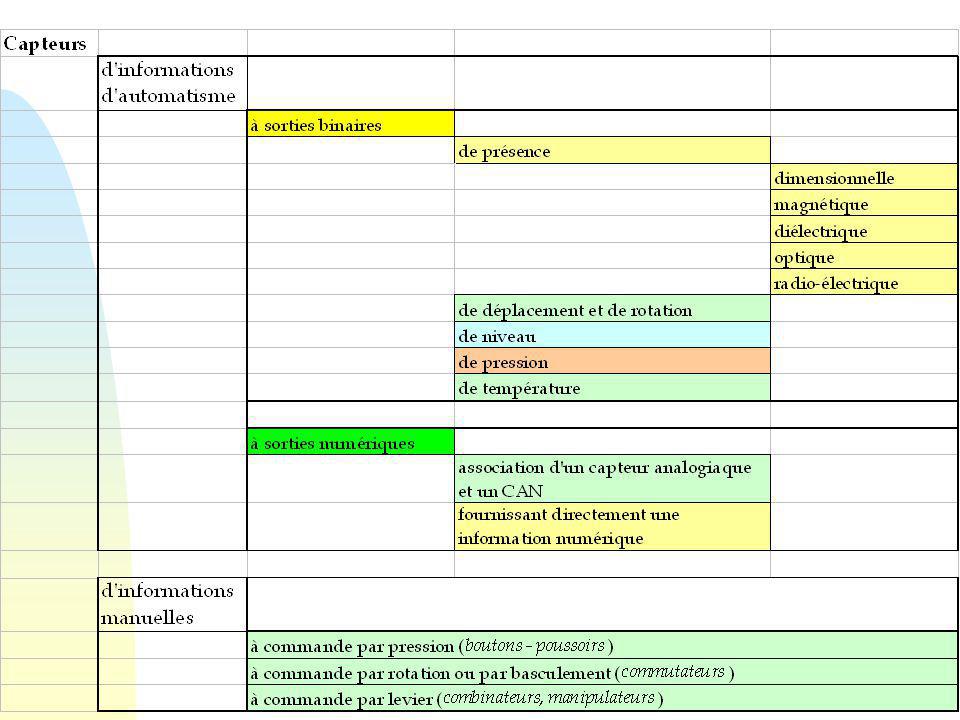
CAPTEURS

43
ÉLECTROMÉCANIQUE Contacts électriques

44
ÉLECTROMÉCANIQUE ouvre Ne fait qu’ouvrir OU fermer des contacts ET
Contacts électriques ouvre ET ferme des contacts Ne fait qu’ouvrir OU fermer des contacts Un contact dont un seul point se débranche (lame pivotante) Un contact dont les deux points se débranchent Ouvre ou ferme un seul contact à la fois (un seul signal est établi) Ouvre ou ferme plusieurs contacts à la fois (plusieurs signaux sont établis en même temps)
 Un contact dont les deux points se débranchent. Ouvre ou ferme un seul contact à la fois (un seul signal est établi) Ouvre ou ferme plusieurs contacts à la fois (plusieurs signaux sont établis en même temps)")
45
ÉLECTROMÉCANIQUE CAPTEURS Boutons et sélecteurs
Démarrage par bouton Normalement Ouvert; Arrêt par bouton Normalement Fermé;

46
ÉLECTROMÉCANIQUE CAPTEURS Symboles

48
Interrupteurs de position
Interrupteurs à levier 4 directions Codeurs incrémentaux industriels à axe creux série Interrupteurs à bouton poussoir Cellules photoélectriques Pressostats Capteur de température Pt 100 de précision

49
Technologie ÉLECTROMÉCANIQUE
ACTIONNEURS

50
ÉLECTROMÉCANIQUE ACTIONNEURS Moteurs électriques (GPA-668)
")
51
ÉLECTROMÉCANIQUE ACTIONNEURS
Schéma de principe de branchement de moteurs Lignes de source Sectionneur porte-fusibles Contacteur Relais thermique Moteur tri-phasé

52
ÉLECTROMÉCANIQUE ACTIONNEURS
Sectionneur porte-fusibles (isoler le moteur, protéger contre une très forte sur-consommation en peu de temps) Relais thermique (protéger contre une sur-consommation modérée longue durée)
 Relais thermique (protéger contre une sur-consommation modérée longue durée)")
53
ÉLECTROMÉCANIQUE ACTIONNEURS Protection thermique

54
ÉLECTROMÉCANIQUE ACTIONNEURS Contacteurs (symboles)
Permet de couper des tensions et courants forts. Utilisé pour la commande de tout moteur

55
ÉLECTROMÉCANIQUE ACTIONNEURS (Contacteurs) Appareil sous tension.
Repos Appareil mise sous tension. Appareil sous tension.

56
L ÉLECTROMÉCANIQUE ACTIONNEURS Relais d’automatismes L au repos : A
If L = 0 Then (A = C and B = 0) C B L L excitée : A If L = 1 Then (A = 0 and B = C) C B A B C
 C. B. L. L excitée : A. If L = 1. Then (A = 0 and B = C) C. B. A. B. C.")
57
ÉLECTROMÉCANIQUE ACTIONNEURS Relais d’automatismes (symbole)
")
58
Technologies FLUIDIQUES
Pneumatique et Hydraulique

59
Technologie PNEUMATIQUE
ACTIONNEURS EQUIPEMENT DE DISTRIBUTION D’AIR CIRCUITS PNEUMATIQUES DE BASE ECONOMIE D’ENERGIE MECANIQUE DES FLUIDES DETECTION DES DEFAUTS LES BUS DE TERRAIN LES BUS DE TERRAIN (Suite) RACCORDS ET TUYAUTERIE LES DISTRIBUTEURS LES DISTRIBUTEURS PROPORTIONNELS SECURITE 1 SECURITE 2 CAPTEURS ELECTRIQUES SYMBOLES ELEMENTS DE DISTRIBUTION
 RACCORDS ET TUYAUTERIE. LES DISTRIBUTEURS. LES DISTRIBUTEURS PROPORTIONNELS. SECURITE 1. SECURITE 2. CAPTEURS ELECTRIQUES. SYMBOLES. ELEMENTS DE DISTRIBUTION.")
60
Technologie FLUIDIQUES
CAPTEURS

61
Technologie PNEUMATIQUE
CAPTEURS Bouton poussoir, leviers Capteurs à galet

62
Technologie PNEUMATIQUE
CAPTEURS symboles

63
Technologie ÉLECTROMÉCANIQUE
ACTIONNEURS

64
Technologie PNEUMATIQUE
ACTIONNEURS Vérins : Simple effet

65
Technologie PNEUMATIQUE
Vérin simple effet qui travaille en poussant à rappel par ressort Vérin simple effet qui travaille en tirant à rappel par ressort Vérin simple effet qui travaille en poussant à rappel par gravité Vérin simple effet qui travaille en tirant à rappel par gravité

66
Technologie PNEUMATIQUE

67
Technologie PNEUMATIQUE
ACTIONNEURS Vérins : double effet

68
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux

69
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux

70
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux

71
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux

72
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux Applications

73
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux

74
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux Le Muscle: une réserve de puissance flexible Grâce à une force initiale très importante et à une accélération rapide, le très léger muscle pneumatique MAS convient très bien à des applications exigeant des cycles courts et des qualités dynamiques. Comparatif de force: Sans concurrence ! Une fois rétracté, le muscle développe une force qui est dix fois plus importante que celle d'un vérin pneumatique conventionnel tout en consommant 40% moins énergie. Pour obtenir la même force, un tiers de la section d'un vérin conventionnel suffit mais la course est plus réduite, au maximum 25% de la longueur nominale. Cette équation se vérifie toutefois dans de nombreuses applications et ouvre de toutes nouvelles voies à la pneumatique. Pour une régularité Absolue Toutes les fois qu' une action pneumatique régulière est exigée, le muscle est l'actionneur idéal. Sa conception sans frottement assure un mouvement absolument régulier et uniforme, par exemple exigé pour les actionneurs de freinage, les systèmes de dosage et systèmes d'entraînement sans aucun broutement !

75
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux Ambiances extrêmes ? No problem! Le système de contraction de membrane est hermétiquement fermé. L'air comprimé peut seulement s'échapper que par l'entrée. Le muscle est donc insensible à l'encrassement, au sable et aux poussières. Exemples d'applications: Industries du Bois Industries Métallurgiques Industries de Construction Mécanique Montage simplifié Le raccordement au circuit de commande est réalisé tout simplement à l'aide de deux raccords coniques en alliage léger anodisé.Divers filetages et inserts sont disponibles pour répondre à quasiment toutes les applications .Après que la longueur nécessaire soit déterminée il suffit que l'utilisateur définisse une connexion d'air axiale ou radiale.

76
Technologie PNEUMATIQUE
ACTIONNEURS Composants spéciaux Avantages pour la conception: Trois différents diamètres et configurations variables Dimensionnement aisé et flexible grâce aux longueurs variables Gamme d'accessoires importante Dimensions compactes Pas d'effet de broutement Coûts de planning réduits grâce à des logiciels de conception Conseils spécifiquement adaptés aux applications par le fabriquant Avantages pour la Logistique Coûts réduits par la standardisation Réduction des coûts d'achats globaux Planification des approvisionnements facilitées grâce au traitement avec codes d'identification. Pas de coûts additionnels Optimisation des approvisionnements grâce à de fortes disponibilités mondiales Conseils directement promulgués sur site par nos experts

77
Technologie PNEUMATIQUE
ACTIONNEURS Utilisation Unité d'entraînement pour emboutir les composants ondulés résultats d'emboutissage idéaux grâce à son action dynamique et à sa grande force. utilisation d'axes excentriques et deux ressorts mécaniques assurent la course de retour de ce système sans friction Unité d'emboutissage durées de cycle très courtes d'une part en raison de son poids minimal et d'autre part parce qu'il n'inclut aucune pièce mobile sa conception simple remplace le levier à bascule compliqué maintenant le système à l'aide d'un cylindre. les fréquences peuvent être facilement augmentées ainsi de 3 à 5 hertz. plus de 50 millions de cycles en charge ont été accomplis jusqu'ici.

78
Technologie PNEUMATIQUE
ACTIONNEURS Utilisation Unité de découpage pour des profilés plastique une rapide accélération au début du mouvement assuer une découpe franche et rapide du profilé plastique et présence d'un régulateur de fin de course permet un arrêt en douceur. Bras de manipulation pour dalles de béton ou jantes d'automobiles Les objets peuvent être soulevés ou abaissés comme désiré en pressurisant ou en épuisant le muscle avec un distributeur à commande manuelle . L'obtention d'une position intermédiaire peut être réalisée automatiquement au moyen de régleurs de pression. Les muscles avec des longueurs de 9 mètres maxi facilitent l'utilisation dans une grande variété d'applications.

79
Technologie PNEUMATIQUE
ACTIONNEURS Utilisation Unité d'alimentation pour machine à laver Bol vibrant Unité d'alimentation pour machine à laver Pince à balle pour palette

80
Technologie PNEUMATIQUE
ACTIONNEURS Utilisation Tri de pièces Tapis de levage Indexage mécanique Traitement de surface Moteur Pompe Tricycle Caractéristique de Traction Condition de fonctionnement

81
Technologie PNEUMATIQUE
Unités pneumatiques compactes Video 1 Video 2 Video 3 Video 4

82
Technologie PNEUMATIQUE
ACTIONNEURS Détection intégrée

83
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Distributeur : Organe d'aiguillage de l'air comprimé.

84
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS

85
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS

86
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS

87
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS

88
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS

89
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Interface électropneumatique Valve de régulation Comparatif de cadence Vérin DNC - avec tige en Inox pour optimiser la résistance aux efforts et le coefficient de friction. Longueur de tube entre le vérin et le distributeur: 2 m. Vérin DNC - Version K10 avec tige en aluminium pour réduire le moment d'inertie et les temps de cycles. Longueur de tube entre le vérin et le distributeur: 2 m. Vérin DNC -Version K10 tige aluminium monté en module avec un distributeur 5/2 pour réduire encore plus les temps de cycle grâce à la proximité des composants

90
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Distributeurs à simple action (pilotage pneumatique) Position Repos : Extension Vérin Position Travail : Rétraction Vérin
 Position Repos : Extension Vérin. Position Travail : Rétraction Vérin.")
91
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Symbolisation des distributeurs Caractérisation d'un distributeur : - le nombre de position : 2 ou 3 - le nombre d'orifices : 2, 3, 4 ou 5 - le type de commande du pilotage assurant le changement de position : simple effet, double effet - la technologie de pilotage : pneumatique ou électro-pneumatique 2 / 2 3 / 2 4 / 2 5 / 2 5 / 3

92
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Distributeurs à simple action (2 montages différents)
")
93
Technologie PNEUMATIQUE
Montage : Distributeur 3/2 + Vérin Simple Action

94
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Distributeurs à double action

95
Technologie PNEUMATIQUE

96
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

97
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

98
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

99
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

100
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

101
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

102
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

103
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

104
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

105
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS - schémas et applications

106
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Commande des distributeurs

107
Technologie PNEUMATIQUE
PRÉ-ACTIONNEURS Commande des distributeurs

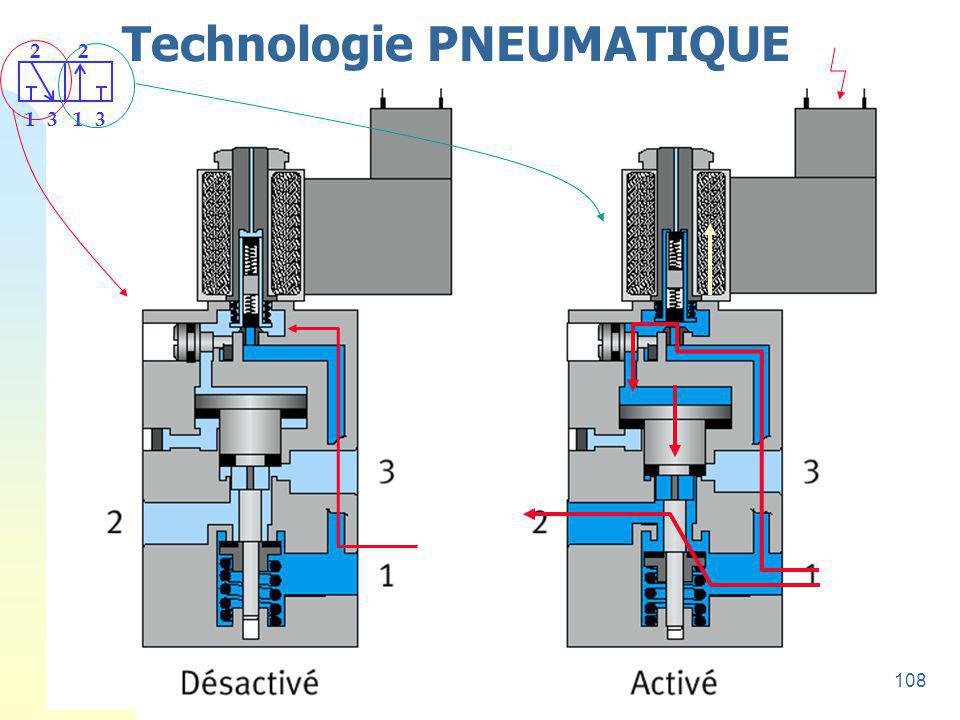
108
Technologie PNEUMATIQUE
2 2 1 3 1 3
109
Technologie PNEUMATIQUE
Commande proportionnelle

110
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

111
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

112
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

113
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

114
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

115
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

116
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

117
Technologie PNEUMATIQUE
ACTIONNEURS Ventouses

118
Technologie PNEUMATIQUE
Éléments de cette technologie TEMPORISATION

119
Technologie PNEUMATIQUE
TEMPORISATION à délai (fixe ou) variable (à sortie positive ou négative)
 variable (à sortie positive ou négative)")
120
Technologie PNEUMATIQUE
TEMPORISATION (symboles)
")
121
Technologie PNEUMATIQUE
Fonctions logiques - ET

122
Technologie PNEUMATIQUE
Fonctions logiques - ET

123
Technologie PNEUMATIQUE
Fonctions logiques - OU

124
Technologie PNEUMATIQUE
Fonctions logiques - OU

125
Technologie PNEUMATIQUE
Fonctions logiques - NON

126
Technologie PNEUMATIQUE
Fonctions logiques - NON

127
Technologie PNEUMATIQUE
Fonctions logiques - INHIBITION

128
Technologie PNEUMATIQUE
Fonctions logiques - INHIBITION

129
Technologie PNEUMATIQUE
Fonctions logiques

130
Technologie PNEUMATIQUE
Fonctions logiques (symboles)
")
131
Technologie PNEUMATIQUE
Applications

132
Technologie PNEUMATIQUE
Applications

133
Technologie PNEUMATIQUE
Applications

134
Technologie PNEUMATIQUE
Applications

135
Technologie PNEUMATIQUE
Applications

136
Technologie PNEUMATIQUE
Applications

137
Technologie HYDRAULIQUE
Circuit hydraulique typique Clapet anti-retour avec ressort Régulateur de pression Réducteur de débit

138
Technologie HYDRAULIQUE2
Schéma symbolique

139
Technologie HYDRAULIQUE2
Site Internet

Présentations similaires