Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Sujet Bac 2010 Lycée Raymond POINCARE
Robot de convoyage à guidage optique

2
Présentation de la société

3
Machines spéciales Assemblage et montage
Concepteur / Fabriquant de portes rapides de manutention Concepteur / Fabriquant de Chariots autoguidés de convoyage au sol Manutention diverses, Magasins, tables à galets, Section élévatrice , Aménagement de bord de lignes Façonnage de toiles techniques / impression numérique très grands formats 67 personnes CA : 12,00 M€ Objectif 2008 14,50 M€

4
Présentation des produits

5
Gamme Tracteur (gamme Master)
FLEXITRACK-MASTER T200/T600/T1500/T2500 (Tracteurs automatisés) Fonction : Tracter tous chariots roulants Tracter des palettes conteneurs et rolls Tracter des trains logistiques. Outil idéal pour : Les ateliers manufacturiers L’approvisionnement de pièces et l’évacuation de produits finis De nombreux accessoires permettent des fonctions intégrales: Décrochage automatique Sélection de destination par douchette code barre Gestion de carrefours pour le croisement des trains Gestion des missions par système externe
 Fonction : Tracter tous chariots roulants. Tracter des palettes conteneurs et rolls. Tracter des trains logistiques. Outil idéal pour : Les ateliers manufacturiers. L’approvisionnement de pièces et l’évacuation de produits finis. De nombreux accessoires permettent des fonctions intégrales: Décrochage automatique. Sélection de destination par douchette code barre. Gestion de carrefours pour le croisement des trains. Gestion des missions par système externe.")
6
Gamme Porteur (gamme Liberty)
FLEXITRACK-LIBERTY P200/P600/P1500/P3000 (Porteur automatisés) Fonction : Circuler dans les allées réduites et sans issues (marche avant et arrière possible) Arrimer et entraîner des chariots en passant dessous Prendre automatiquement des charges sur des convoyeurs et les redéposer automatiquement Transférer des produits en passant à l’extérieur Outil idéal pour : Les ateliers manufacturiers L’approvisionnement de pièces et l’évacuation de produits finis Transfert inter-process De nombreux accessoires permettent des fonctions intégrales: Décrochage automatique Sélection de destination par douchette code barre Gestion de carrefours pour le croisement des Flexitrack Gestion des missions par système externe
 Fonction : Circuler dans les allées réduites et sans issues (marche avant et arrière possible) Arrimer et entraîner des chariots en passant dessous. Prendre automatiquement des charges sur des convoyeurs et les redéposer automatiquement. Transférer des produits en passant à l’extérieur. Outil idéal pour : Les ateliers manufacturiers. L’approvisionnement de pièces et l’évacuation de produits finis. Transfert inter-process. De nombreux accessoires permettent des fonctions intégrales: Décrochage automatique. Sélection de destination par douchette code barre. Gestion de carrefours pour le croisement des Flexitrack. Gestion des missions par système externe.")
7
Gamme C (gamme Spéciale)
FLEXITRACK-SPE Sxx200/Sxx600/SxxP1500/SxxP3000 (Porteur ou tracteur automatisés) Fonction : Transporter des déchets spéciaux Accueil visiteur Renseignement publicitaire Promotion commerciale Support d’exposition Ronde automatique Outil idéal pour : Groupes Hospitaliers Grands magasins Accueil visiteur automatisé Sécurité De nombreux accessoires permettent des fonctions intégrales: Guidage laser Guidage GPS Communication avec système informatique Afficheurs vidéo
 Fonction : Transporter des déchets spéciaux. Accueil visiteur. Renseignement publicitaire. Promotion commerciale. Support d’exposition. Ronde automatique. Outil idéal pour : Groupes Hospitaliers. Grands magasins. Accueil visiteur automatisé. Sécurité. De nombreux accessoires permettent des fonctions intégrales: Guidage laser. Guidage GPS. Communication avec système informatique. Afficheurs vidéo.")
8
Machines spéciales Bureau d’étude mécanique Matériel:
6 poste s de DAO avec logiciel suivant : SOLID WORKS SOLID EDGE PRO INGENIOR CATIA AUTOCAD CADKEY Personnel : 1 responsable de bureau d’étude 3 projeteurs 1 responsable d’étude 2 chargés d’affaires

9
Portes industrielles rapides

10
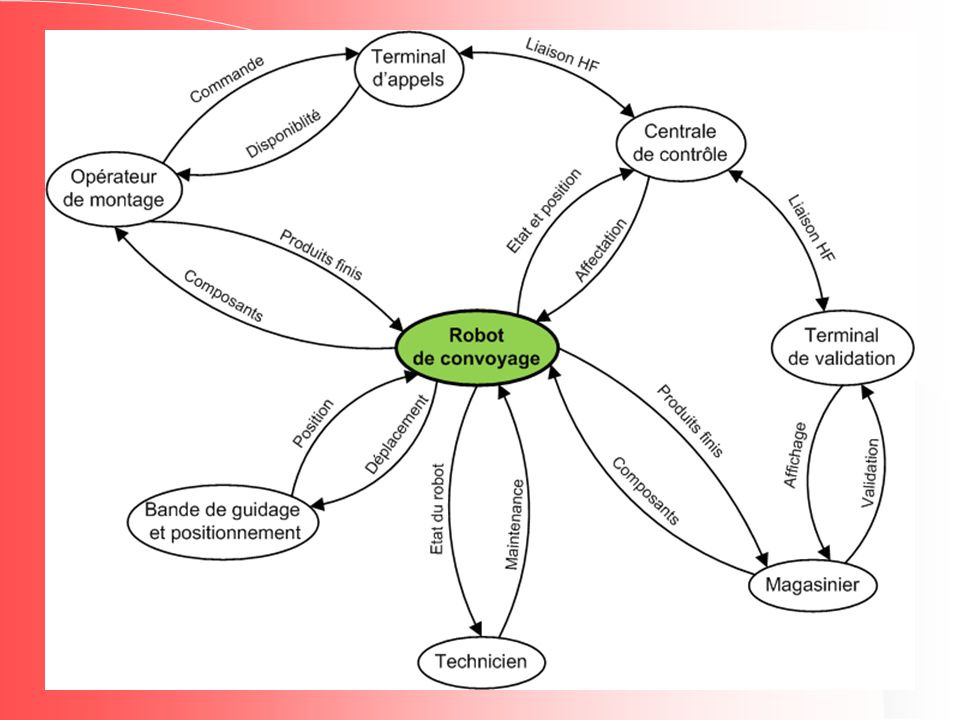
Diagramme sagittal du système étudié

12
Tracteur Flexitrack Master Caractéristiques
Force de traction 430 N 300 N 150 N Rayon de braquage minimum 700 mm 600 mm 500 mm Dimensions L x l x h 1330 x 760 x 710 960 x 600 x 600 860 x 510 x 480 Poids (batterie incluse) 270 kg 170 kg 110 kg Sécurités installées en standard Pare chocs, radar, buzzer, feu à éclat, sécurité crochet Pare chocs, radar, buzzer, feu à éclat Système de guidage Optique Support de guidage Bande adhésive inoxydable Tension d'alimentation 48 volts DC 24 volts DC Vitesse de déplacement nominale 2,2 km/h Autonomie charge moyenne 12 h Déplacement manuel Par joystick Nombre de circuits programmables 10
 270 kg. 170 kg. 110 kg. Sécurités installées en standard. Pare chocs, radar, buzzer, feu à éclat, sécurité crochet. Pare chocs, radar, buzzer, feu à éclat. Système de guidage. Optique. Support de guidage. Bande adhésive inoxydable. Tension d alimentation. 48 volts DC. 24 volts DC. Vitesse de déplacement nominale. 2,2 km/h. Autonomie charge moyenne. 12 h. Déplacement manuel. Par joystick. Nombre de circuits programmables. 10.")
13
Schéma fonctionnel de degré 1

14
Tracteur Flexitrack Master Principe du guidage
Les robots suivent une bande réfléchissante posée au sol d’environ 50mm de large; La tête de guidage est composée de 2 cellules solidaires de la roue de direction; Le principe consiste à suivre la bande en corrigeant la trajectoire du robot par l’action sur le moteur de direction en fonction du sens de sortie de la bande.

15
Tracteur Flexitrack Master Principe du guidage

16
Tracteur Flexitrack Master Principe du guidage
Interruption de la bande de guidage. Dans ce cas le robot fige le moteur de direction et avance encore pendant 140ms. Au-delà de ce temps, il s’arrête et passe en procédure de recherche de bande

17
Tracteur Flexitrack Master Gestion des sécurités
Les robots FLEXITRACK peuvent représentés une forte masse roulante (jusqu’à 5 tonnes). Malgré leur faible vitesse, ils peuvent être dangereux.
. Malgré leur faible vitesse, ils peuvent être dangereux.")
18
Tracteur Flexitrack Master Gestion des sécurités
Arrêt d’urgence. Les arrêts d’urgence sont déclenchés par les éléments suivants: Bouton d’arrêt d’urgence; Pare-chocs; La remise en route se fait pas deux impulsions: L’acquittement du défaut; La remise en route.

19
Tracteur Flexitrack Master Gestion des sécurités
Arrêts « défaut de sécurité ». Le robot doit s’arrêter dans les cas suivants: Sortie de route; Erreurs de direction; Blocage du robot.

20
Tracteur Flexitrack Master Gestion des sécurités
Arrêts radar. Les arrêts radars sont provoqués par la détection d’un obstacle devant le robot par un radar à ultrasons. L’obstacle disparaît, le robot repart; Le temps entre la disparition de l’obstacle et le redémarrage est programmable.

21
Tracteur Flexitrack Master Gestion des moteurs de propulsion
Le robot est équipé de deux motoréducteurs branchés en série, ce qui permet de réaliser le différentiel dans les courbes. Le démarrage du robot doit être le plus doux possible; L’arrêt normal et radar doivent être eux aussi les plus doux possible;

22
Tracteur Flexitrack Master Gestion des arrêts en gare
Les arrêts en gare sont matérialisés par une bande perpendiculaire à la bande de guidage (méthode qui nécessite le comptage des gares avant de trouver la bonne); La liaison entre le robot et le système FLEXIMANAGER s’effectue par l’intermédiaire d’un signal HF à 433MHz de portée 300m
; La liaison entre le robot et le système FLEXIMANAGER s’effectue par l’intermédiaire d’un signal HF à 433MHz de portée 300m.")
Présentations similaires








 Quand vous verrez ce point dinterrogation apparaître, il faudra répondre à une question sur votre.>")










, un ROBOT est un Appareil qui agit de façon automatique pour une fonction donnée.>")