1 Correction DS du 15 mars 2011 Mécanique des solides Modélisation et paramétrage des mécanismes Correction du devoir du 15 mars 2011
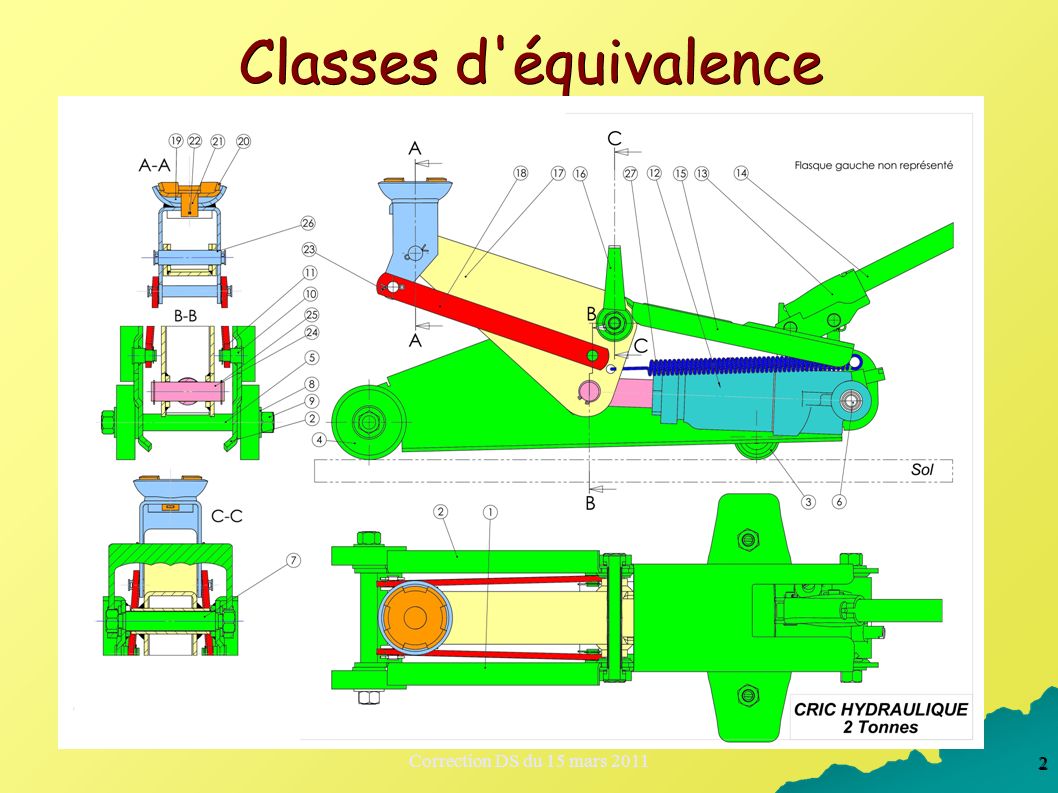
2 Correction DS du 15 mars 2011 Classes d'équivalence
3 Correction DS du 15 mars 2011 Classes d'équivalence
4 Correction DS du 15 mars 2011 Graphe des liaisons Corps de vérin Biellettes Tige de vérin Support de véhiculeBâti Bras de levage Sellette
5 Correction DS du 15 mars 2011 Graphe des liaisons - minimale Corps de vérin Biellettes Tige de vérin Support de véhiculeBâti Bras de levage Sellette
6 Correction DS du 15 mars 2011 Schéma cinématique spatial
7 Correction DS du 15 mars 2011 Schéma cinématique spatial
8 Correction DS du 15 mars 2011Mobilités Deux mobilités souhaitées Le mécanisme doit soulever le point d'appui et pouvoir tourner autour du point d'appui (orientation) Note : cette modélisation ne prend pas en compte les roues et la pompe de commande que le dessin d'ensemble ne décrit pas correctement
9 Correction DS du 15 mars solides hors bâti : 36 ddl 7 liaisons pivot : 35 ddl bloqués 1 liaison pivot glissant : 4 ddl bloqués 2 mobilités souhaitées : 2 ddl utilisé Système hyperstatique de degré 5 Hyperstatisme 3 liaisons pivot : 15 ddl bloqués 2 liaison pivot glissant : 8 ddl bloqués 1 glissière : 5 ddl bloqués 2 liaisons rotules : 6 ddl bloqués 2 mobilité souhaitée : 2 ddl utilisé Système apparemment isostatique
10 Correction DS du 15 mars 2011 Hauteur de levage
11 Correction DS du 15 mars 2011 Hauteur de levage
12 Correction DS du 15 mars 2011 x = f(α) et α = f(x) soit en projection dans la base 0 : soit en regroupant différemment
13 Correction DS du 15 mars 2011 x = f(α) et α = f(x) Réciproque x = f(α)
14 Correction DS du 15 mars 2011 x = f(α) et α = f(x) Résultat α = f(x)
15 Correction DS du 15 mars 2011 Vecteurs taux de rotation
16 Correction DS du 15 mars 2011 Vitesse de E Autre manière de l'aborder : à partir du torseur cinématique du solide 1 (bras de levage) Transfert du torseur en E
17 Correction DS du 15 mars 2011 Vitesse de E Autre manière de l'aborder : mouvement de rotation autour d'un axe fixe : Dans le plan (O,z,x), E décrit un cercle de centre 0 de rayon d x 1 à une vitesse angulaire La vitesse de E est tangente au cercle, donc normale au rayon x 1, soit de direction z 1 le sens de rotation impose une vitesse positive suivant cet axe La norme de cette vitesse est égale au produit du rayon par la vitesse angulaire soit d
18 Correction DS du 15 mars 2011 Vitesse de A A partir du point O A partir du point B Nous pouvons en déduire que
19 Correction DS du 15 mars 2011 Accélération de E Autre manière de l'aborder : mouvement de rotation autour d'un axe fixe : Dans le plan (O,z,x), E décrit un cercle de centre 0 de rayon d x 1 à une vitesse angulaire sa vitesse est L'accélération de E est composée d'une accélération tangen- tielle et d'une accélération normale.
20 Correction DS du 15 mars 2011 Accélération de E L'accélération tangentielle est tangente à la trajectoire et colinéaire à la vitesse, sa norme valant dv/dt, soit L'accélération normale a pour norme le carré de la vitesse divisé par le rayon du cercle, et est dirigée vers le centre de rotation, soit L'accélération de E est la somme de ces deux termes soit
21 Correction DS du 15 mars 2011 Torseur cinématique de R 3 (pièce 19) Du fait des biellettes et de la pivot en E, la sellette (pièce 19) reste toujours orientée de la même manière par rapport à R 0 ce qui donne Le point E appartient à la fois à R 1 et à R 3 (il est le centre de la pivot entre 1 et 3). nous pouvons donc écrire que Nous pouvons donc écrire que
22 Correction DS du 15 mars 2011 Mouvement de F En utilisant la relation des torseurs (et en constatant que la résultante du torseur cinématique de 3 est nulle), nous trouvons La sellette a un mouvement de translation circulaire. Le point F décrit un cercle de centre T et de rayon d tel que