Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Le sens du toucher

2
Qu'est-ce que le toucher ? Le sens qui permet aux êtres vivants de percevoir les frottements, pressions, et autres déformations qui s'exercent sur l'enveloppe corporelle. Il contribue à informer le corps de son état dans un contexte donné, ce qui en fait l'un des quatre composants du système somatosensoriel ou « somesthésique ». Les trois autres sont le système de perception de la température, le système de perception de la douleur, et le système proprioceptif ( haptique) qui fournit des informations sur les postures et les mouvements grâce à des récepteurs situés dans les muscles, les articulations et les tendons.
 qui fournit des informations sur les postures et les mouvements grâce à des récepteurs situés dans les muscles, les articulations et les tendons..")
3
Partie A: Sytème somatosensoriel

5
1- La perception cutanée ou passive Elle résulte de la stimulation d'une partie de la peau alors que le segment corporel qui la porte est totalement immobile. Tel est le cas lorsque le dos de la main repose sur une table et qu'un objet pointu est déplacé sur sa paume. Dans ce cas, comme seule la couche superficielle de la peau est soumise à des déformations mécaniques, le traitement perceptif ne concerne que les informations cutanées liées au stimulus appliqué sur la main.

6
2- La perception tactilo-kinesthésique ou haptique ou active (terme introduit en psychologie par Revesz, 1934, 1950) Elle résulte de la stimulation de la peau résultant des mouvements actifs d'exploration de la main entrant en contact avec des objets. C'est ce qui se produit quand, par exemple, la main et les doigts suivent le contour d'un objet pour en apprécier la forme. Dans ce cas, il s'ajoute nécessairement à la déformation mécanique de la peau celle des muscles, des articulations et des tendons qui résultent des mouvements d'exploration. De plus, sur Terre, la main ou le bras va être soumis à la gravité et les forces déployées par le système proprioceptif vont non seulement être intégrées par le système nerveux central dans un but purement "moteur" mais vont être perçues par le système en termes de « sens de l'effort ». Des processus très complexes sont impliqués ici car ils doivent intégrer simultanément les informations cutanées et les informations proprioceptives et motrices liées aux mouvements d’exploration cutanées pour former un ensemble indissociable appelé perceptions haptiques.

7
Partie B: Récepteurs sensoriels de la peau

8
La zone de communication entre deux cellules nerveuses, c'est-à-dire entre une terminaison d'un axone et une dendrite, est appelée synapse. L'arrivée d'un influx nerveux à une synapse provoque la libération en dehors de la cellule de neurotransmetteurs qui sont captés par des récepteurs de la cellule cible qui, en réponse, sera activée ou inhibée. Des exemples de neurotransmetteurs sont la sérotonine, la dopamine, l'adrénaline, l'acétylcholine, le glutamate et l'endomorphine. Qu'est-ce que la cellule nerveuse (neurone)?
 .")
11
I. Généralités : La peau est richement innervée, à la fois par des nerfs cérébro-spinaux et des nerfs végétatifs : les nerfs végétatifs, le plus souvent amyéliniques et de type sympathique, sont destinés : – aux vaisseaux (fibres vaso-motrices); – aux muscles érecteurs des poils; – aux glandes sudoripares (fibres excito-sécrétoires). les nerfs cérébro-spinaux sont impliqués dans la sensibilité cutanée. Ils abandonnent des fibres nerveuses que l’on peut, sur la base du diamètre de leur axone, classer en trois catégories principales (voir tableau ci-dessous) : – les grosses fibres myélinisées (type II); – les petites fibres myélinisées (type III); – les fibres amyéliniques (type IV), de beaucoup les plus nombreuses.
; – aux muscles érecteurs des poils; – aux glandes sudoripares (fibres excito-sécrétoires). les nerfs cérébro-spinaux sont impliqués dans la sensibilité cutanée. Ils abandonnent des fibres nerveuses que l’on peut, sur la base du diamètre de leur axone, classer en trois catégories principales (voir tableau ci-dessous) : – les grosses fibres myélinisées (type II); – les petites fibres myélinisées (type III); – les fibres amyéliniques (type IV), de beaucoup les plus nombreuses..")
12
Les fibres nerveuses sensitives de la peau, sont en fait des prolongements afférents des protoneurones sensitifs (cellules en T) des ganglions spinaux. Elles peuvent être : isolées : correspondant à des terminaisons libres; associées à d’autres structures pour former des corpuscules sensoriel qui font de la peau un organe sensoriel : l’organe du tact. Les différents récepteurs cutanés (mécanorécepteurs, thermorécepteurs et nocicepteurs) sont classés en fonction de critères à la fois : morphologiques (terminaisons nerveuses libres ou organes encapsulés) et fonctionnels (mécanorécepteurs, thermorécepteurs ou nocicepteurs).
 sont classés en fonction de critères à la fois : morphologiques (terminaisons nerveuses libres ou organes encapsulés) et fonctionnels (mécanorécepteurs, thermorécepteurs ou nocicepteurs)..")
13
II. Terminaisons nerveuses libres : Elles peuvent être trouvées dans presque tous les tissus de l’organisme. Dans la peau, elles atteignent les couches inférieures du stratum germinativum, au niveau de la jonction dermo-épidermique. Leurs axones perdent la gaine de myéline dans leur partie terminale, c’est à dire : soit avant les ramifications terminales; soit au niveau de la lame basale (quand ils pénètrent dans l’épiderme). Ils envoient, par la suite, des évaginations bulbiformes ou digitiformes (recouvertes uniquement par une membrane basale) à travers des lacunes de la gaine de Schwann. Ces évaginations représentent les parties réceptrices des terminaisons nerveuses libres. Leur stimulation déterminerait les sensations thermiques et douloureuses.
. Ils envoient, par la suite, des évaginations bulbiformes ou digitiformes (recouvertes uniquement par une membrane basale) à travers des lacunes de la gaine de Schwann. Ces évaginations représentent les parties réceptrices des terminaisons nerveuses libres. Leur stimulation déterminerait les sensations thermiques et douloureuses..")
14
A- Thermorécepteurs : Les points de réception du chaud et du froid sont répartis sur la peau avec une densité plus faible que celle des mécanorécepteurs. Il s’agit de terminaisons nerveuses libres de fibres amyéliniques (de type IV) ou de fibres faiblement myélinisées (de type III). Les thermorécepteurs, spécifiques : sont insensibles aux stimuli non thermiques; montrent un champ de réception petit. B- Nocicepteurs : Les récepteurs à la douleur sont sensibles : au pincement; à la piqûre; aux températures extrêmes (>43° et <20°). Ce sont des terminaisons nerveuses libres (fibres de type IV ou de type III).
 ou de fibres faiblement myélinisées (de type III). Les thermorécepteurs, spécifiques : sont insensibles aux stimuli non thermiques; montrent un champ de réception petit. B- Nocicepteurs : Les récepteurs à la douleur sont sensibles : au pincement; à la piqûre; aux températures extrêmes (>43° et <20°). Ce sont des terminaisons nerveuses libres (fibres de type IV ou de type III)..")
15
III. Organes terminaux encapsulés : Il s’agit, le plus souvent, de mécanorécepteurs. Les corpuscules tactiles présentent à considérer : la terminaison d’une fibre nerveuse (dont le corps cellulaire est celui d’une cellule en T d’un ganglion rachidien); des cellules d’origine schwanienne entourant cette terminaison. une capsule conjonctive : séparant l’ensemble « terminaison nerveuse – cellules schwaniennes » des tissus environnants.
; des cellules d’origine schwanienne entourant cette terminaison. une capsule conjonctive : séparant l’ensemble « terminaison nerveuse – cellules schwaniennes » des tissus environnants..")
16
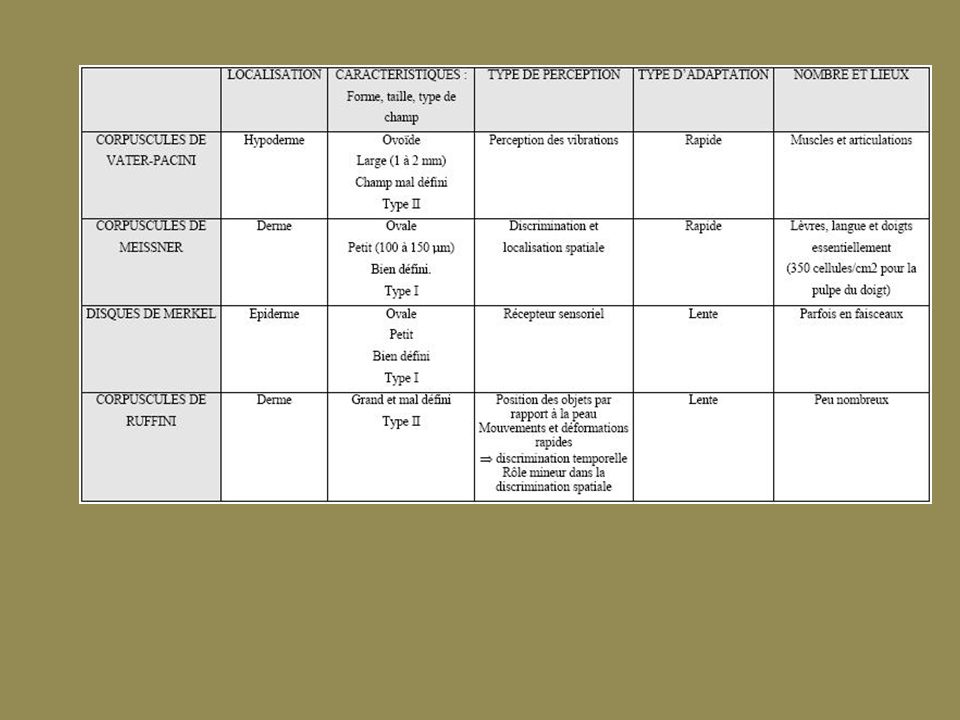
A- Mécanorécepteurs à adaptation rapide : 1) Corpuscules de Vater-Pacini : a. Localisation : Volumineux (1 à 2 mm), ils sont situés dans l’hypoderme de la peau épaisse (paumes des mains et plantes des pieds) et de la peau avec poils. b. Structure : Ce sont des corpuscules : encapsulés, « en bulbe d’oignon »; innervés par une fibre myélinisée de gros calibre (de type II), à vitesse de conduction rapide. En fait, c’est l’axone de cette fibre qui, à sa terminaison, forme le bulbe. Granuleux et allongé, il est entouré de deux séries de lamelles concentriques : un groupe externe, provenant du périnèvre et fait de cellules endothéliformes et de fibres conjonctives; un groupe interne, formé par des cellules de Schwann. Ces dernières s’entassent au centre pour former la massue. c. Fonction : Ce corpuscule est particulièrement apte à déceler les vibrations tout en restant sensible à la pression. Son champ de réception est grand, à bords flous. N.B. : Les corpuscules de Krause sont très peu différents des corpuscules de Pacini.
, ils sont situés dans l’hypoderme de la peau épaisse (paumes des mains et plantes des pieds) et de la peau avec poils. b. Structure : Ce sont des corpuscules : encapsulés, « en bulbe d’oignon »; innervés par une fibre myélinisée de gros calibre (de type II), à vitesse de conduction rapide. En fait, c’est l’axone de cette fibre qui, à sa terminaison, forme le bulbe. Granuleux et allongé, il est entouré de deux séries de lamelles concentriques : un groupe externe, provenant du périnèvre et fait de cellules endothéliformes et de fibres conjonctives; un groupe interne, formé par des cellules de Schwann. Ces dernières s’entassent au centre pour former la massue. c. Fonction : Ce corpuscule est particulièrement apte à déceler les vibrations tout en restant sensible à la pression. Son champ de réception est grand, à bords flous. N.B. : Les corpuscules de Krause sont très peu différents des corpuscules de Pacini..")
17
2) Corpuscules de Meissner : a. Localisation : Ils sont situés dans les papilles du derme, surtout au niveau de la peau épaisse avec une densité considérablement agrandie au niveau des pulpes des doigts (index). Cette répartition évoque déjà leur importance dans les perceptions tactiles fines (d’où le nom de corpuscules tactiles de Meissner). b. Structure : Ce sont des corpuscules : encapsulés, « en pile d’assiettes »; innervés par une fibre myélinisée de gros calibre (de type II), à vitesse de conduction rapide. Dans ce corpuscule réalisant une formation ovale, l’axone (parfois, on en retrouve plusieurs) : est enserré par des cellules schwaniennes entassées en lamelles (d’où le terme « pile d’assiettes »); a perdu sa gaine de myéline et a adopté un trajet circulaire (en hélice) entre ces lamelles cellulaires; se termine par des renflements bulbiformes, considérés comme les éléments récepteurs. c. Fonction : L’architecture du corpuscule de Meissner est telle que toute déformation de la surface épidermique se répercute sur l’édifice cellulaire et entraîne l’excitation de la fibre sensitive. Ce corpuscule est donc bien un mécanorécepteur, capable de répondre rapidement aux stimuli tactiles (contact, pression). Son champ de réception est petit, à bords nets.
. Cette répartition évoque déjà leur importance dans les perceptions tactiles fines (d’où le nom de corpuscules tactiles de Meissner). b. Structure : Ce sont des corpuscules : encapsulés, « en pile d’assiettes »; innervés par une fibre myélinisée de gros calibre (de type II), à vitesse de conduction rapide. Dans ce corpuscule réalisant une formation ovale, l’axone (parfois, on en retrouve plusieurs) : est enserré par des cellules schwaniennes entassées en lamelles (d’où le terme « pile d’assiettes »); a perdu sa gaine de myéline et a adopté un trajet circulaire (en hélice) entre ces lamelles cellulaires; se termine par des renflements bulbiformes, considérés comme les éléments récepteurs. c. Fonction : L’architecture du corpuscule de Meissner est telle que toute déformation de la surface épidermique se répercute sur l’édifice cellulaire et entraîne l’excitation de la fibre sensitive. Ce corpuscule est donc bien un mécanorécepteur, capable de répondre rapidement aux stimuli tactiles (contact, pression). Son champ de réception est petit, à bords nets..")
18
B- Mécanorécepteurs à adaptation lente : 1) Corpuscules de Merkel : a. Localisation : Ils sont disséminés dans le stratum germinativum de l’épiderme et dans la gaine épithéliale externe des poils. b. Structure : Il s’agit de corpuscules : non encapsulés (il s’agit en fait d’une forme de transition entre les terminaisons nerveuses libres et les organes terminaux encapsulés); faits d’une terminaison neuritique (résultant de l’arborisation de l’axone principal, fibre de type II) aplatie en disque (disque ou ménisque tactile) et d’une cellule (cellule épithéliale de Merkel) contenant des grains cytoplasmiques denses aux électrons; particulièrement nombreux au niveau des disques de Pinkus, petites élevures épidermiques visibles à la loupe. c. Fonction : Ils sont sensibles à la pression et à l’étirement (intensité, durée), mais ont une vitesse de réponse lente.
; faits d’une terminaison neuritique (résultant de l’arborisation de l’axone principal, fibre de type II) aplatie en disque (disque ou ménisque tactile) et d’une cellule (cellule épithéliale de Merkel) contenant des grains cytoplasmiques denses aux électrons; particulièrement nombreux au niveau des disques de Pinkus, petites élevures épidermiques visibles à la loupe. c. Fonction : Ils sont sensibles à la pression et à l’étirement (intensité, durée), mais ont une vitesse de réponse lente..")
19
2) Corpuscules de Ruffini : a. Localisation : Ils sont situés dans le derme de la peau épaisse et de la peau avec poils. b. Structure : Ce sont des corpuscules fusiformes et feuilletés : encapsulés (enveloppe conjonctive en continuité avec le périnèvre de la fibre nerveuse pénétrant le corpuscule), faits d’un neurite qui s’enroule autour de fibres collagènes. c. Fonction : Le corpuscule de Ruffini est un récepteur lent, sensible à la pression et à l’étirement. Il est en fait, informateur de la position et de la vitesse d’installation du stimulus. Son champ de réception est grand à bords flous. 3) Corpuscules de Golgi-Mazzione : Dermiques, ils présentent la même structure générale que les autres corpuscules, mais les lamelles schwaniennes forment deux coiffes hémisphériques séparées par une fente axiale qui contient l’axone. Ce dernier envoie des expansions digitiformes entre les lamelles.
, faits d’un neurite qui s’enroule autour de fibres collagènes. c. Fonction : Le corpuscule de Ruffini est un récepteur lent, sensible à la pression et à l’étirement. Il est en fait, informateur de la position et de la vitesse d’installation du stimulus. Son champ de réception est grand à bords flous. 3) Corpuscules de Golgi-Mazzione : Dermiques, ils présentent la même structure générale que les autres corpuscules, mais les lamelles schwaniennes forment deux coiffes hémisphériques séparées par une fente axiale qui contient l’axone. Ce dernier envoie des expansions digitiformes entre les lamelles..")
20
Partie C: Etude de la perception des textures

21
1-Définition du terme « texture » : Il englobe toutes les propriétés physiques définissant la microstructure d’une surface : rugosité, dureté et élasticité, etc. Mais seules la rugosité et, dans une moindre mesure, la dureté, ont été bien étudiées.

22
2-Etude expérimentale de la rugosité : Pour varier la rugosité on utilise des tissus différents, des papiers abrasifs dont la densité des grains est contrôlée, ou des stries rectilignes dont la profondeur et l’espacement sont variés. Katz (1925/1989) est le premier a avoir étudié systématiquement la perception de la texture et son apport demeure important aujourd’hui. Il a d’abord souligné la nécessité du mouvement d’exploration et, surtout, il a suggéré que la discrimination des textures relève d’un processus complexe comportant une composante spatiale, impliquée dans la perception des textures rugueuses, et une composante vibratoire à l’œuvre dans les textures plus fines.
 est le premier a avoir étudié systématiquement la perception de la texture et son apport demeure important aujourd’hui. Il a d’abord souligné la nécessité du mouvement d’exploration et, surtout, il a suggéré que la discrimination des textures relève d’un processus complexe comportant une composante spatiale, impliquée dans la perception des textures rugueuses, et une composante vibratoire à l’œuvre dans les textures plus fines..")
23
3-Résultats des travaux contemporains a)-Variation spatiale : Le rôle du changement dans la stimulation créé par le mouvement a été précisé plus récemment par Hollins et Risner (2000). Ces auteurs comparent la discrimination de papiers abrasifs dans une condition totalement passive (sans mouvement) et en condition de déplacement passif de la surface sous le doigt du sujet. Ils observent que les textures les plus fines sont bien discriminées en présence de mouvement, mais ne le sont plus en condition purement statique. Au contraire, pour les textures les plus rugueuses, il n’y a pas de différence entre les conditions statiques et avec déplacement. Selon les auteurs, c’est parce que la condition statique supprime la composante vibratoire de la stimulation qu’elle dégrade la discrimination des textures fines alors que pour les textures rugueuses, la composante spatiale (la seule préservée en condition passive) est suffisante pour permettre la discrimination.
 et en condition de déplacement passif de la surface sous le doigt du sujet. Ils observent que les textures les plus fines sont bien discriminées en présence de mouvement, mais ne le sont plus en condition purement statique. Au contraire, pour les textures les plus rugueuses, il n’y a pas de différence entre les conditions statiques et avec déplacement. Selon les auteurs, c’est parce que la condition statique supprime la composante vibratoire de la stimulation qu’elle dégrade la discrimination des textures fines alors que pour les textures rugueuses, la composante spatiale (la seule préservée en condition passive) est suffisante pour permettre la discrimination..")
24
b)-Variation vibratoire : La présence des deux composantes vibratoire et spatiale dans la perception tactile des textures, déjà évoquée par Katz (1925/1989), est en effet confirmée par des travaux récents qui conduisent Hollins et Risner (2000) à proposer une théorie duale (duplex theory) de cette perception. Ainsi, Hollins, Fox, et Bishop (2001) montrent que si, à l’insu des participants, on imprime une légère vibration (150 Hz) à une surface texturée, celle-ci sera jugée de plus en plus rugueuse à mesure que l’amplitude de cette vibration augmente jusqu'à 400 Hz. Cet effet apparaît même chez les personnes qui se sont aperçu de la présence d’une vibration de la surface. C’est donc bien que la composante vibratoire joue un rôle dans la perception de la texture, en plus de la composante spatiale déjà connue.
 montrent que si, à l’insu des participants, on imprime une légère vibration (150 Hz) à une surface texturée, celle-ci sera jugée de plus en plus rugueuse à mesure que l’amplitude de cette vibration augmente jusqu à 400 Hz. Cet effet apparaît même chez les personnes qui se sont aperçu de la présence d’une vibration de la surface. C’est donc bien que la composante vibratoire joue un rôle dans la perception de la texture, en plus de la composante spatiale déjà connue..")
25
C)- Etude de la texture à travers un objet On sait que la perception tactile ne se fait pas uniquement par contact cutané direct avec une surface, mais aussi en contactant cette surface avec un instrument rigide tenu par la main (comme par exemple la canne utilisée par les aveugles). Klatzky et Lederman (1999) montrent que la composante vibratoire est préservée en grande partie quand l’exploration de la surface se fait par l’intermédiaire d’un instrument rigide. Elles ont ainsi comparé l’estimation subjective de la rugosité et la discrimination de la rugosité de surfaces comportant des petits points en relief selon que les participants utilisent leur doigt nu, ou leur doigt portant un gant, ou avec un gant comportant une petite plaque rigide sous l’extrémité de l’index, ou enfin en utilisant un bâtonnet cylindrique terminé soit par une base arrondie de 4 mm de diamètre, soit par une base conique de 2 mm de diamètre. Dans toutes les conditions, les discriminations sont au-dessus du niveau du hasard et la rugosité estimée varie en fonction de l'espacement entre les éléments de la surface. Les meilleures performances sont observées avec le doigt et, quand la perception se fait à travers un objet rigide, l’impression de rugosité augmente pour les surfaces les plus fines. Les auteurs soulignent l’intérêt de ces résultats qui montrent comment les composantes vibratoires et spatiales continuent à agir à travers un instrument, et discutent de leurs applications possibles dans les domaines de la télé-opération et de la réalité virtuelle.
 montrent que la composante vibratoire est préservée en grande partie quand l’exploration de la surface se fait par l’intermédiaire d’un instrument rigide. Elles ont ainsi comparé l’estimation subjective de la rugosité et la discrimination de la rugosité de surfaces comportant des petits points en relief selon que les participants utilisent leur doigt nu, ou leur doigt portant un gant, ou avec un gant comportant une petite plaque rigide sous l’extrémité de l’index, ou enfin en utilisant un bâtonnet cylindrique terminé soit par une base arrondie de 4 mm de diamètre, soit par une base conique de 2 mm de diamètre. Dans toutes les conditions, les discriminations sont au-dessus du niveau du hasard et la rugosité estimée varie en fonction de l espacement entre les éléments de la surface. Les meilleures performances sont observées avec le doigt et, quand la perception se fait à travers un objet rigide, l’impression de rugosité augmente pour les surfaces les plus fines. Les auteurs soulignent l’intérêt de ces résultats qui montrent comment les composantes vibratoires et spatiales continuent à agir à travers un instrument, et discutent de leurs applications possibles dans les domaines de la télé-opération et de la réalité virtuelle..")
26
d)- Le rôle de l’attention dans l’étude de la discrimination tactile des textures. Ainsi, en utilisant la procédure d’amorçage valide ou non valide, Sathian et Burton (1991) observent que la détection d’un changement abrupt de texture ne nécessite pas d’attention sélective, alors que l’attention améliore les performances lorsqu’il faut détecter une absence de changement de texture ou discriminer deux textures.
 observent que la détection d’un changement abrupt de texture ne nécessite pas d’attention sélective, alors que l’attention améliore les performances lorsqu’il faut détecter une absence de changement de texture ou discriminer deux textures..")
Présentations similaires












 et l’autre sur le muscle en avant de la jambe (le jambier) au cours de mouvements en extension.>")








