Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Sécurité active dans les véhicules automobiles
Ahmed El Hajjaji, Laboratoire Modélisation, Information et Systèmes Université de Picardie Jules Verne Mél : Tél. : , Fax : Journée Régulation industrielle Marrakech

2
Plan Présentation du Laboratoire MIS Présentation de l’équipe COVE
Résultats dans le domaine de véhicule Freinage d’urgence Stabilité en virage Suspension active Conclusions Journée Régulation industrielle Marrakech

3
Laboratoire MIS Université de Picardie Jules Verne
MIS (Modélisation, Information et Systèmes) : Domaine STIC (Sciences et Technologies de l’Information et de la Communication). Fusion de 2 unités : LaRIA - Laboratoire de Recherche en Informatique d’Amiens. CREA – Centre de Robotique, d’Électrotechnique et d’Automatique. Directeur : Gilles Kassel Tél. : Fax : Journée Régulation industrielle Marrakech
 : Domaine STIC (Sciences et Technologies de l’Information et de la Communication). Fusion de 2 unités : LaRIA - Laboratoire de Recherche en Informatique d’Amiens. CREA – Centre de Robotique, d’Électrotechnique et d’Automatique. Directeur : Gilles Kassel Tél. : Fax : Journée Régulation industrielle Marrakech.")
4
Laboratoire MIS – Personnel
14 professeurs des universités 25 maîtres de conférences 30 doctorants et 9 ATER et post-doctorants 3 ITA/BIATOS Journée Régulation industrielle Marrakech

5
Laboratoire MIS Equipes de recherche
Combinatoire et algorithmique Systèmes distribués, mots et applications Ingénierie des connaissances Perception et Robotique Commande et Véhicule Journée Régulation industrielle Marrakech

6
Laboratoire MIS – Activités générales
Informatique : Algorithmique, complexité Parallélisme, systèmes répartis, réseaux Théorie des Graphes, recherche opérationnelle Logistique : optimisation des flux (mieux planifier les tâches, mieux lisser l’activité, optimiser les ressources, …) Gestion des connaissances, mémoires d’entreprise, Web Sémantique Automatique et Robotique : Diagnostic, Contrôle automatique, Commande tolérante aux fautes Aide et assistance à la conduite dans les véhicules (confort et sécurité). Gestion de l’énergie (Véhicule solaire, Ferroviaire). Vision omnidirectionnelle Perception multi-sensorielle et omnidirectionnelle de robots Localisation des robots Journée Régulation industrielle Marrakech
 Gestion des connaissances, mémoires d’entreprise, Web Sémantique. Automatique et Robotique : Diagnostic, Contrôle automatique, Commande tolérante aux fautes. Aide et assistance à la conduite dans les véhicules (confort et sécurité). Gestion de l’énergie (Véhicule solaire, Ferroviaire). Vision omnidirectionnelle. Perception multi-sensorielle et omnidirectionnelle de robots. Localisation des robots. Journée Régulation industrielle Marrakech.")
7
1 Professeur 4 Maîtres de conférences 8 Doctorants et 5 Master 2
Commande & Véhicule Responsable : A. El Hajjaji Composition de l’équipe 1 Professeur 4 Maîtres de conférences 8 Doctorants et 5 Master 2 Journée Régulation industrielle Marrakech

8
Axes de recherche Commande et diagnostic robuste Véhicules terrestres
Commande robuste Diagnostic et commande tolérante aux fautes Véhicules terrestres Véhicules automobiles Véhicules ferroviaires Journée Régulation industrielle Marrakech

9
Commande robuste Maîtrise des comportements dynamiques des systèmes non linéaires incertains et soumis à des perturbations. Commande Robuste Consignes Incertitudes Perturbations Système Journée Régulation industrielle Marrakech

10
Commande robuste Modèle 1 Modèle 2 Modèle i Modèle n Système
Contrôleur 1 Contrôleur 2 Contrôleur i Contrôleur n état sorties commande consignes Observateur 1 Observateur 2 Observateur i Observateur n État estimé Journée Régulation industrielle Marrakech

11
Diagnostic robuste Module de diagnostic de défaillances défauts
Actionneurs Processus Capteurs Modèle Génération Présence de Tests Détection défaut de résidus statistiques Origine de la Localisation défaillance Caractérisation Identification de la défaillance Évolution de Pronostic la défaillance Module de diagnostic de défaillances Journée Régulation industrielle Marrakech

12
Commande tolérante aux fautes
Gestion des défauts dans le système Reconfiguration des lois de contrôle Accommodation des lois de contrôle Mode dégradé Journée Régulation industrielle Marrakech

13
Architectures de FTC r1 r2 rn Sorties Commande Loi de Commande
Résidu Observateur 1 < Observateur 2 Observateur n r1 r2 rn Logique de décision Banc d’observateurs Etats estimés défauts Sorties Modèle Véhicule Commande Loi de Commande Etat estimé sans défauts Journée Régulation industrielle Marrakech

14
Architectures de FTC commande sorties FDI Système + Contrôleur nominal
Test de décision Banc de contrôleurs Contrôleur nominal FDI + commande sorties défauts Journée Régulation industrielle Marrakech

15
Véhicules automobiles
- Freinage Suspension Stabilité en virage Management des énergies Non linéarités, couplages des dynamiques, variations paramétriques, perturbations extérieures et des défauts. Journée Régulation industrielle Marrakech

16
Contrôle actif du pantographe (Collaboration avec SNCF)
Améliorer le contact pantographe/caténaire Surveiller et éviter les ruptures des câbles de la caténaire. Réduire l’usure de la bande de captage de courant. Réduire les arcs électriques. Augmenter la durée de vie des installations électriques dans le TGV. Algorithmes de contrôle et de diagnostic robuste Journée Régulation industrielle Marrakech

17
Pourquoi les systèmes de sécurité active ?
Le véhicule est un système complexe constitué de plusieurs éléments Journée Régulation industrielle Marrakech

18
Statistiques Nombre de voitures dans le monde
En 1970 : En 2005 : plus Nombre de voitures fabriquées En 1970 : En 2005 : plus Nombre d’accidents en US En 1998 : ( décès). Nombre de décès dans le monde : 1 mort/min. 90 % des accidents sont dus aux erreurs humaines
. Nombre de décès dans le monde : 1 mort/min. 90 % des accidents sont dus aux erreurs humaines.")
19
Solutions Véhicules propres
Intégration des systèmes d’aide à la conduite. Améliorer le confort dans les véhicules.

20
Dynamique de véhicule Etudier la dynamique de véhicule : analyser et comprendre les interactions du véhicule avec : Environnement : Air et sol Conducteur : actions de commande (braquage, accélération et freinage). Aérodynamique Accélérateur Véhicule Pour étudier la dynamique de véhicule, analyser et comprendre les interactions du véhicule avec : Réactions dynamiques Braquage Freinage Interaction Pneu/sol Conducteur Journée Régulation industrielle Marrakech
. Aérodynamique. Accélérateur. Véhicule. Pour étudier la dynamique de véhicule, analyser et comprendre les interactions du véhicule avec : Réactions. dynamiques. Braquage. Freinage. Interaction. Pneu/sol. Conducteur. Journée Régulation industrielle Marrakech.")
21
Interaction avec l’environnement
Le contact que la voiture peut avoir avec l'extérieur est double : Avec l'air : Forces aérodynamiques Avec le sol : Forces adhérence. Pour la force d'adhérence, on distingue : une composante longitudinale (accélérer et freiner le véhicule). une composante transversale (tourner la voiture). une composante normale (supporter la charge et amortir les déformations du sol). Journée Régulation industrielle Marrakech
. une composante transversale (tourner la voiture). une composante normale (supporter la charge et amortir les déformations du sol). Journée Régulation industrielle Marrakech.")
22
Force d’adhérence Fx=Fzm(s) Fy=Fzm(a)
Journée Régulation industrielle Marrakech

23
Analyse du freinage Journée Régulation industrielle Marrakech

24
Analyse de freinage s [0 1] Journée Régulation industrielle Marrakech
![Analyse de freinage s [0 1] Journée Régulation industrielle Marrakech](http://slideplayer.fr/slide/1299294/3/images/24/Analyse+de+freinage+s+%EF%83%8E%5B0+1%5D+Journ%C3%A9e+R%C3%A9gulation+industrielle+Marrakech.jpg "Analyse de freinage s [0 1] Journée Régulation industrielle Marrakech")
25
ABS BOSH Journée Régulation industrielle Marrakech

26
Dynamique latérale du véhicule
Journée Régulation industrielle Marrakech

27
Analyse de la stabilité en fonction du braquage et de la vitesse
df =0 U=20m/s Route sèche df =0.06 rad U=20m/s Route sèche df =0.05 U=25m/s Route sèche df =0.08rad U=20m/s Route sèche Journée Régulation industrielle Marrakech

28
Analyse de la stabilité en fonction du braquage et de la vitesse
df =0.05 rad U=20m/s Route sèche df =0.08 rad U=15m/s Route sèche Journée Régulation industrielle Marrakech

29
Mouvement en virage (sous-virage et survirage)
Comportement caractéristique d’un véhicule. effet neutre : dérive avant= dérive arrière effet sous-vireur : dérive avant>dérive arrière effet sur-vireur : dérive avant<dérive arrière a=af+ar La voiture est soumise à une force centrifuge - donc transversale par rapport à la voiture - qui doit être équilibrée par des forces transversales d'adhérence. Un pneumatique fournissant un effort transversal subit une déformation qui modifie sa trajectoire d'un angle de dérive. Si l'on augmente la pression des pneumatiques, ou encore la charge, la dérive diminue. De l'angle de dérive dépend le comportement caractéristique de la voiture. Il peut être sous-vireur, survireur ou encore neutre (dérive nulle). L'angle de braquage nécessaire pour suivre un virage circulaire de rayon donné varie d'une voiture à l'autre et, pour une même voiture, il dépend de la vitesse (nous entendons par angle de braquage celui des roues : l'angle au volant étant directement proportionnel). On peut déterminer la relation entre l'angle de braquage le rayon de courbure R de la trajectoire et l'empattement E de la voiture en fonction des angles de dérive avant et arrière On trouve : Quand les angles de dérive avant et arrière sont semblables, l'angle de braquage (égal à E / R) dépend uniquement de paramètres géométriques : en ce cas. on dit que la voiture est neutre. Quand la dérive à l'avant est plus grande qu'à l'arrière, l'angle de braquage nécessaire pour parcourir un virage de rayon donné est plus grand que celui requis pour une voiture neutre, on dit alors que la voiture est sous- vireuse. Le contraire se produit si l'angle de dérive est plus petit à l'avant qu'à l'arrière (voiture survireuse). Quand on augmente la vitesse, dans une courbe de rayon constant, les réactions transversales des pneumatiques et, par conséquent, les angles de dérive, s'élèvent également. Il existe une relation précise, mais compliquée, entre un virage de rayon donné, la façon dont il est parcouru et l'angle de braquage que le pilote doit réaliser. L'estimation de cette corrélation est laissée à la sensibilité et à l'habileté de ce dernier. Généralement, les voitures présentent une tendance sous-vireuse plutôt accentuée, destinée à leur conférer une certaine stabilité. Au fur et à mesure que le survirage augmente, les angles de braquage requis diminuent jusqu'à une valeur très faible, ce qui constitue évidemment une situation d'instabilité. Si le sous-virage est préférable, il ne doit cependant pas être excessif, car, dans ce cas, il diminuerait la maniabilité (angles de braquage importants). Causes principales de survirage ou de sous-virage - Véhicules ont une tendance sous virage (AV la stabilité IN : maniabilité) Au fur et à mesure que le survirage : l’instabilité également) Journée Régulation industrielle Marrakech
. L angle de braquage nécessaire pour suivre un virage circulaire de rayon donné varie d une voiture à l autre et, pour une même voiture, il dépend de la vitesse (nous entendons par angle de braquage celui des roues : l angle au volant étant directement proportionnel). On peut déterminer la relation entre l angle de braquage le rayon de courbure R de la trajectoire et l empattement E de la voiture en fonction des angles de dérive avant et arrière On trouve : Quand les angles de dérive avant et arrière sont semblables, l angle de braquage (égal à E / R) dépend uniquement de paramètres géométriques : en ce cas. on dit que la voiture est neutre. Quand la dérive à l avant est plus grande qu à l arrière, l angle de braquage nécessaire pour parcourir un virage de rayon donné est plus grand que celui requis pour une voiture neutre, on dit alors que la voiture est sous- vireuse. Le contraire se produit si l angle de dérive est plus petit à l avant qu à l arrière (voiture survireuse). Quand on augmente la vitesse, dans une courbe de rayon constant, les réactions transversales des pneumatiques et, par conséquent, les angles de dérive, s élèvent également. Il existe une relation précise, mais compliquée, entre un virage de rayon donné, la façon dont il est parcouru et l angle de braquage que le pilote doit réaliser. L estimation de cette corrélation est laissée à la sensibilité et à l habileté de ce dernier. Généralement, les voitures présentent une tendance sous-vireuse plutôt accentuée, destinée à leur conférer une certaine stabilité. Au fur et à mesure que le survirage augmente, les angles de braquage requis diminuent jusqu à une valeur très faible, ce qui constitue évidemment une situation d instabilité. Si le sous-virage est préférable, il ne doit cependant pas être excessif, car, dans ce cas, il diminuerait la maniabilité (angles de braquage importants). Causes principales de survirage ou de sous-virage - Véhicules ont une tendance sous virage (AV la stabilité IN : maniabilité) Au fur et à mesure que le survirage : l’instabilité également) Journée Régulation industrielle Marrakech.")
30
Survirage et sous-virage
est gradient du survirage braquage Sous virage Véhicule neutre neutre Véhicule sous-vireur Survirage Véhicule survireur vitesse Vitesse critique Journée Régulation industrielle Marrakech

31
Causes de survirage ou de sous-virage
Angle de dérive si la pression et la charge. Pneumatiques avant et arrière différents. En général, ceci ne se produit que sur les voitures de compétition: dans les voitures de série, on utilise presque toujours des pneumatiques identiques qui sont seulement gonflés à des pressions différentes pour les deux essieux. Le fait de gonfler davantage les pneumatiques arrière a pour conséquence d'avoir des angles de dérive plus grands à l'avant qu'à l'arrière, ce qui rend la voiture sous-vireuse. Pneumatiques avant et arrière différents. En général, ceci ne se produit que sur les voitures de compétition: dans les voitures de série, on utilise presque toujours des pneumatiques identiques qui sont seulement gonflés à des pressions différentes pour les deux essieux (cette différence est supérieure à celle qui résulterait d'un gonflage proportionnel aux charges verticales exercées sur ces essieux). Le fait de gonfler davantage les pneumatiques arrière a pour conséquence d'avoir des angles de dérive plus grands à l'avant qu'à l'arrière, ce qui rend la voiture sous-vireuse. - Travail des pneumatiques avant et arrière. En virage, la force centrifuge appliquée au centre de gravité de la voiture à une certaine distance au-dessus du sol donne naissance à un couple de renversement avec, pour conséquence, un transfert de charge des roues intérieures sur les roues extérieures. De la même façon, à l'accélération ou au freinage, un transfert peut s'opérer sur l'essieu avant ou arrière qui modifiera aussi les angles de dérive. Pour obtenir un comportement sous-vireur, il faudra dans tous les cas répartir le transfert en donnant la prépondérance à l'essieu avant. Journée Régulation industrielle Marrakech
. Le fait de gonfler davantage les pneumatiques arrière a pour conséquence d avoir des angles de dérive plus grands à l avant qu à l arrière, ce qui rend la voiture sous-vireuse. - Travail des pneumatiques avant et arrière. En virage, la force centrifuge appliquée au centre de gravité de la voiture à une certaine distance au-dessus du sol donne naissance à un couple de renversement avec, pour conséquence, un transfert de charge des roues intérieures sur les roues extérieures. De la même façon, à l accélération ou au freinage, un transfert peut s opérer sur l essieu avant ou arrière qui modifiera aussi les angles de dérive. Pour obtenir un comportement sous-vireur, il faudra dans tous les cas répartir le transfert en donnant la prépondérance à l essieu avant. Journée Régulation industrielle Marrakech.")
32
ESP BOSH Journée Régulation industrielle Marrakech

33
Journée Régulation industrielle Marrakech

34
Suspension u Journée Régulation industrielle Marrakech

35
Suspension Objectifs : Supporter le poids et la charge du véhicule en limitant l’amplitude des débattements. Confort : filtrer les irrégularités de la route Sécurité : tenue de la route en maintenant les roues en contact avec le sol Journée Régulation industrielle Marrakech

36
Analyse de la suspension
Débattement: Mode de pompage de la caisse : Mode de battement de la roue : Pour une charge donnée, plus les raideurs sont faibles plus les débattements sont élevées Mode caisse le plus faible possible pour filtrer au maximum les sollicitations de la route accroître le confort du passagers Le mode roue doit être élevé afin de maintenir le contact avec le sol accroître la tenue de route Journée Régulation industrielle Marrakech

37
Suspension Sécurité et confort
Remarques : -Les spectres fréquentiels des sollicitations des profils routiers deviennent très peu énergétiques au-delà de 10 Hz. Le corps humain est très sensible aux modes de fréquences <1 Hz. (mal de mer) Mode de pompage caisse entre 1 et 2 Hz (sportive), Mode roue >10Hz Si on suppose que ms, m et k2 fixe, alors il faut choisir k1 : - pour limiter la déflexion il faut augmenter k1. - pour abaisser le mode caisse il faut diminuer k1. - pour accroître le mode roue il faut augmenter k1. Journée Régulation industrielle Marrakech
 Mode de pompage caisse entre 1 et 2 Hz (sportive), Mode roue >10Hz. Si on suppose que ms, m et k2 fixe, alors il faut choisir k1 : - pour limiter la déflexion il faut augmenter k1. - pour abaisser le mode caisse il faut diminuer k1. - pour accroître le mode roue il faut augmenter k1. Journée Régulation industrielle Marrakech.")
38
Suspension passive si k1 augmente : BP augmente et phénomène d’instabilité augmente une raideur de suspension très élevée rend le véhicule très inconfortable un effet déstabilisant problème de sécurité - un amortissement élevé limite les oscillations des réponses indicielles et engendre plus de confort Journée Régulation industrielle Marrakech

39
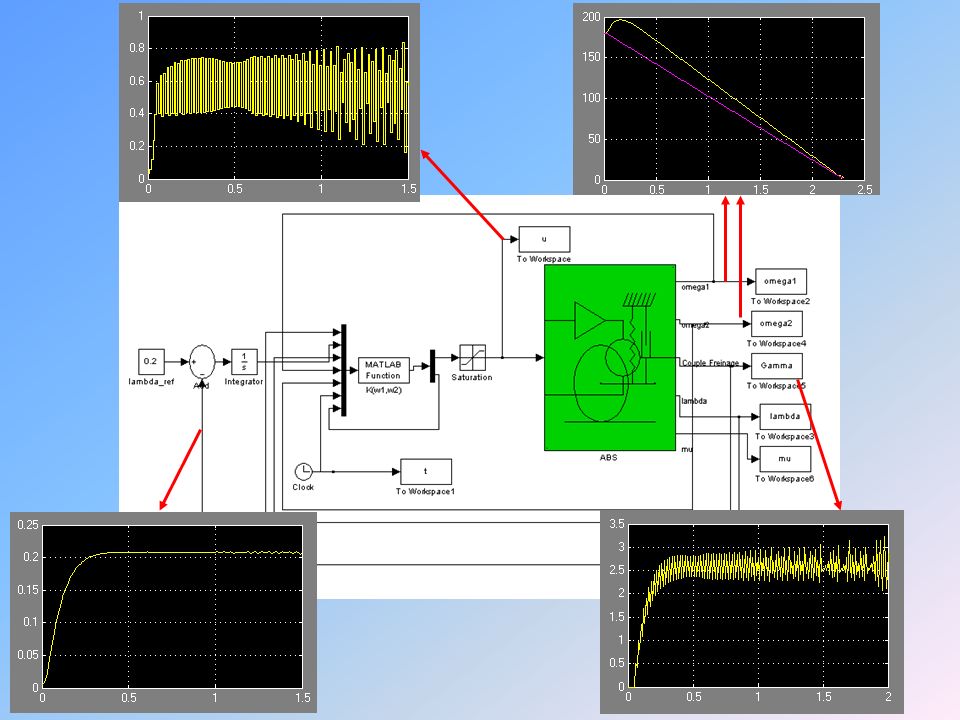
Amélioration du freinage : ABS

40
Amélioration du freinage : ABS
MODELE D’ETAT Forces actionneurs Grandeurs mesurées INCERTITUDES + MODELE INCERTAIN Retour de SORTIE

42
Régulation de taux de glissement
Contrôle linéaire Contrôle à mode glissant flou Journée Régulation industrielle Marrakech

43
Stabilité en virage Résultats
Braquage des roues avant Angle du glissement latérale et son estimé Vitesse du lacet et son estimée Journée Régulation industrielle Marrakech

44
Résultats de simulation
Contrôle linéaire Contrôle robuste Sans contrôle Dérive Vitesse du lacet Journée Régulation industrielle Marrakech

45
Suspension : cas linéaire
Boucle ouverte Contrôle linaire Journée Régulation industrielle Marrakech

46
Comparaison suspension passive et active
Command H∞ basée sur un observateur flou Journée Régulation industrielle Marrakech

47
Suspension active Structure de l’observateur Structure de la commande
kp zr zp mr mc zc k Structure de l’observateur Structure de la commande

48
Résultats de simulation

49
Contrôle de la dynamique de véhicule
Objectifs : Garantir la stabilité globale. Placer les pôles de l’observateur et du contrôleur dans des régions LMI. Garantir une convergence plus rapide de l’erreur d’estimation par rapport à l’état du système. Algorithme qui combine : D-stabilité et le H

50
Résultats de simulation

51
Commande robuste non fragile basée sur observateur
Journée Régulation industrielle Marrakech

52
Résultats de simulation
Angle de braquage Journée Régulation industrielle Marrakech

53
Résultats de simulation (2)
Evolution du vecteur d’état du véhicule Journée Régulation industrielle Marrakech

54
Vitesse longitudinale et vitesses des quatres roues
Résultats de simulation (3) Vitesse longitudinale et vitesses des quatres roues Journée Régulation industrielle Marrakech
 Vitesse longitudinale et vitesses des quatres roues. Journée Régulation industrielle Marrakech.")
55
Commande FTC de la dynamique latérale du véhicule
Bloc FDI ây1 observateur 1 [R1,ay R1,r] ây2 observateur 2 [R2,ay R2,r] ay δf • r < Mz Bloc de décision Commutation Véhicule controller

56
Résultats de simulation
Sans utilisation de la stratégie FTC Avec utilisation de la stratégie FTC Défaut additif à la sortie du capteur 1 Défaut additif à la sortie du capteur 2 Angle de braquage des roues avant Sortie du capteur 1: et son estimé Sortie du capteur 2: et son estimé

57
Commande FTC de la dynamique latérale du véhicule
Commande H∞ basée sur observateur: Banc de contrôleurs + Banc d’observateurs Génération des résidus & Prise de décision Résidus: Observateur 1 Observateur 2 ● Contrôleur 1 ● Contrôleur 2

58
Résultats de simulation
Sans utilisation de la stratégie FTC Avec utilisation de la stratégie FTC Défaut additif à la sortie du capteur 1 Défaut additif à la sortie du capteur 2 Angle de braquage des roues avant Sortie du capteur 1: et son estimé Sortie du capteur 2: et son estimé

59
Commande FTC de la dynamique latérale du véhicule
Commande par retour de sortie statique: Banc de contrôleurs + Banc d’observateurs Bloc «FDI» y1 Génération des résidus & Prise de décision Procédé y2 . SMO: Sliding Mode Observer yp SMO 1 SMO 2 . SMO p SOC 1 ● SOC: Static Output Controller SOC 2 ● . . ● SOC p Commutateur Bloc de commande Journée Régulation industrielle Marrakech

60
Résultats de simulation
Sans utilisation de la stratégie FTC Avec utilisation de la stratégie FTC Défaut additif à la sortie du capteur 1 Défaut additif à la sortie du capteur 2 Sortie du capteur 1: Sorties nominales (sans défauts) Sortie du capteur 2: et son estimé
 Sortie du capteur 2: et son estimé.")
61
Conclusions Surveillance active du comportement du véhicule sans mesure de la dérive (vitesse latérale), Régulation du taux de glissement pour améliorer le freinage d’urgence. Amélioration de la stabilité du véhicule en présence de défauts capteurs. Confort : filtrer les irrégularités de la route Journée Régulation industrielle Marrakech

Présentations similaires