Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Programmation linéaire en nombres entiers Algorithme de la subdivision successive («Branch and Bound Algorithm»)
")
2
Introduction Stratégie : "couper en 2" la région réalisable, recouper en 2 chaque partie de la région réalisable susceptible de contenir la soln optimale et ainsi de suite. Ce processus se poursuit jusqu’à ce qu’on trouve la soln optimale ou une soln sous-optimale satisfaisante ou bien que l’on détecte l’absence de solns. Variantes : la façon de couper en 2 la région réalisable, le choix de la partie de la région réalisable à examiner en premier, la façon de s’assurer qu’un morceau ne contient pas la soln optimale afin de pouvoir éliminer ce morceau.

3
Exemple décrivant l’algorithme de subdivision successive
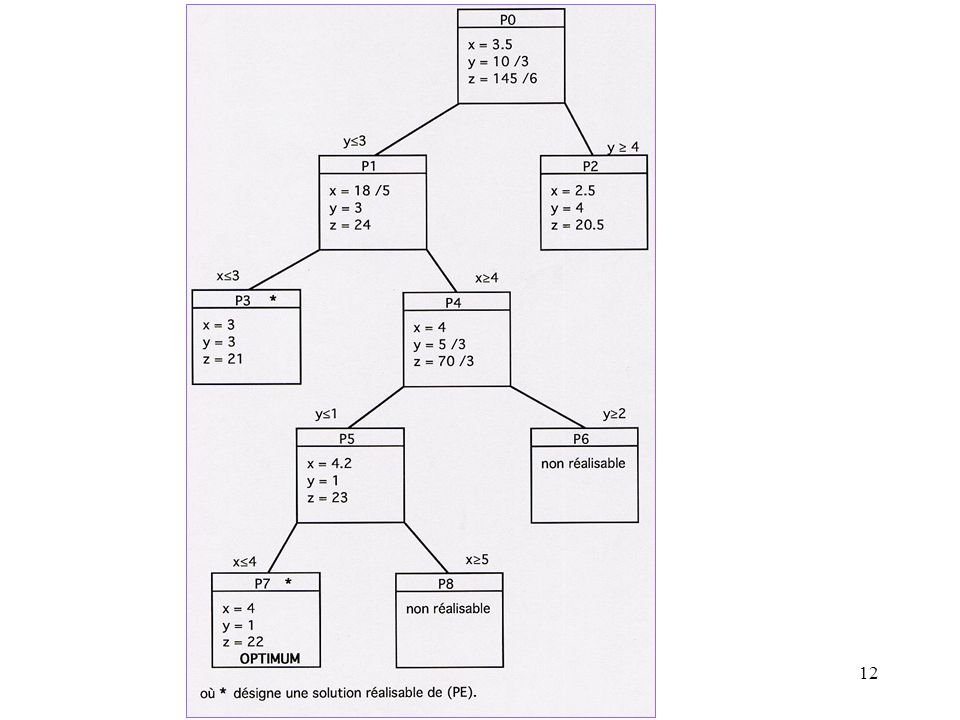
Le simplexe nous donne comme soln optimale de (P0) : x = 3.5, y = 10/3 et z0max = 145/6.
 : x = 3.5, y = 10/3 et z0max = 145/6.")
5
Formons les 2 problèmes issus de (P0) :
Quelle coupe peut-on effectuer dans l'ensemble des solns réalisables de (P0) qui n'ôte aucun point entier de cet ensemble? La soln optimale de (PE) doit vérifier soit y ≤ 3, soit y ≥ 4. Formons les 2 problèmes issus de (P0) : simplexe x = 18/5, y = 3, z1max = 24. (P1) x = 5/2, y = 4, z2max = 20,5. (P2)
 qui n ôte aucun point entier de cet ensemble La soln optimale de (PE) doit vérifier soit y ≤ 3, soit y ≥ 4. Formons les 2 problèmes issus de (P0) : simplexe. x = 18/5, y = 3, z1max = 24. (P1) x = 5/2, y = 4, z2max = 20,5. (P2)")
6
Puisque z1max > z2max on choisit de travailler avec (P1) pour l’instant.
Si la soln optimale de (PE) vérifie les contraintes de (P1), elle vérifiera aussi soit x 3 ou x 4. Formons 2 nouveaux problèmes issus de (P1): redondant redondant (P3) x = 3, y = 3, z3max = 21. x = 4, y = 5/3, z4max = 70/3. (P4)
 vérifie les contraintes de (P1), elle vérifiera. aussi soit x 3 ou x 4. Formons 2 nouveaux problèmes issus de (P1): redondant. redondant. (P3) x = 3, y = 3, z3max = 21. x = 4, y = 5/3, z4max = 70/3. (P4)")
7
Puisque z4max > z3max on choisit de travailler avec (P4) pour l’instant :
soit y 1 ou y 2.

8
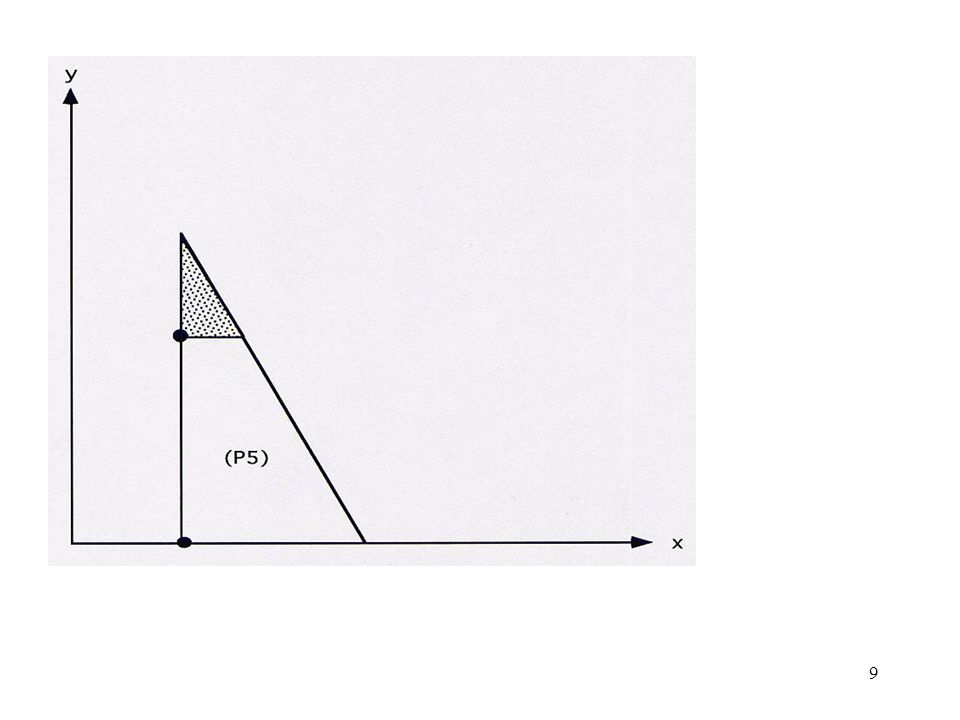
(P5) redondant x = 4.2, y = 1, z5max = 23. (P6) Pas de solns réalisables
 redondant x = 4.2, y = 1, z5max = 23. (P6) Pas de solns réalisables")
10
À partir de (P5), on peut construire les 2 problèmes suivants :
simplexe (P7) x = 4, y = 1, z7max = 22. (P8) Pas de solns réalisables.
 x = 4, y = 1, z7max = 22. (P8) Pas de solns. réalisables.")
11
(P7) possède une solution optimale entière réalisable pour (PE).
Pour savoir si elle est optimale, il faut examiner les problèmes que nous avons laissés de côté en créant des coupes. (P8) et (P6) : on peut les négliger (pas de solns réalisables). (P3) : on peut le négliger car z7max = 22 > 21 = z3max. (P2) : on peut le négliger car z7max = 22 > 20.5 zmax. L’ajout de coupes à (P2) ne peut donner de solns où la fonction objective est plus grande que 20,5. Donc, x = 4, y = 1 et zmax = 22 est la soln optimale de (PE).
 et (P6) : on peut les négliger (pas de solns réalisables). (P3) : on peut le négliger car z7max = 22 > 21 = z3max. (P2) : on peut le négliger car z7max = 22 > 20.5 zmax. L’ajout de coupes à (P2) ne peut donner de solns. où la fonction objective est plus grande que 20,5. Donc, x = 4, y = 1 et zmax = 22 est la soln optimale de (PE).")
13
Cas particulier : Quelques variables ne sont pas entières et les autres le sont. Il suffit de ne pas introduire de coupes sur les variables non astreintes à être entières. Exemple : Le problème précédent où x n’est pas astreinte à être entière. Dans l’arborescence précédente, on voit que (P1) et (P2) nous donnent 2 solns réalisables et donc que la soln optimale serait dans ce cas : x = 18 / 5, y = 3 et zmax = 24.
 et (P2) nous donnent 2 solns réalisables et donc que la soln optimale. serait dans ce cas : x = 18 / 5, y = 3 et zmax = 24.")
14
Énoncé de l’algorithme de subdivision successive
(0) Construire une banque de problèmes qui ne renferme initialement que le problème suivant : Max z = ctx A x = b (P0) x 0 k 1; zk = -; (renferme une borne inférieure de la valeur optimale de l’objectif z) (1) Si la banque de problèmes est vide, terminer les calculs, i.e. rechercher la meilleure soln réalisable rencontrée dont la valeur de l’objectif est égale à la borne inférieure. Cette soln réalisable est alors optimale. Autrement, enlever un programme linéaire de la banque et aller à (2).
 Construire une banque de problèmes qui ne renferme initialement. que le problème suivant : Max z = ctx. A x = b (P0) x 0. k 1; zk = -; (renferme une borne inférieure de la valeur optimale. de l’objectif z) (1) Si la banque de problèmes est vide, terminer les calculs, i.e. rechercher la meilleure soln réalisable rencontrée dont la valeur de. l’objectif est égale à la borne inférieure. Cette soln réalisable est alors optimale. Autrement, enlever un programme linéaire de la banque et. aller à (2).")
15
(2) Résoudre le programme choisi. Si la valeur de l’objectif est au plus zk, zk+1 zk, k k +1, aller à (1). Autrement, aller à (3). (3) Si la soln optimale obtenue du programme linéaire satisfait les contraintes d'intégralité, noter-le *, zk+1 valeur optimale de l’objectif de ce programme, faire k k + 1, aller à (1). Autrement, aller à (4). (4) Choisir une variable xj n’ayant pas une valeur entière (xj = br). Ajouter 2 programmes linéaires à la banque issus de celui de (1) : 1e problème : xj [br] est ajoutée. 2ième problème : xj [br] + 1 est ajoutée. Faire zk+1 zk, k k +1, aller à (1).
. (3) Si la soln optimale obtenue du programme linéaire satisfait les. contraintes d intégralité, noter-le *, zk+1 valeur optimale de l’objectif de ce programme, faire k k + 1, aller à (1). Autrement, aller à (4). (4) Choisir une variable xj n’ayant pas une valeur entière (xj = br). Ajouter 2 programmes linéaires à la banque issus de celui de (1) : 1e problème : xj [br] est ajoutée. 2ième problème : xj [br] + 1 est ajoutée. Faire zk+1 zk, k k +1, aller à (1).")
16
Choix d’un programme dans la banque :
Résoudre l’un des 2 programmes que l’on vient d’ajouter à la banque ou le dernier à être introduit qui n’est pas encore résolu. En passant d’un nœud à son fils dans l’arbre, on a le même problème à résoudre avec seulement une contrainte en plus. Il s’agit d’utiliser l’algorithme dual du simplexe. Borne supérieure sur la valeur de l’objectif : La résolution du programme continu à chaque nœud de l’arbre nous fournit une borne supérieure sur la valeur de l’objectif de la meilleure soln possible dans cette branche.

Présentations similaires













>")


.>")



