Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
RHEOLOGIE Conformation et dynamique des polymères Notions de rhéologie
Viscoélasticité de polymères simples Rhéologie des suspensions colloïdales

2
Conformation et dynamique des polymères
Conformation d’une chaîne idéale Conformation et dynamique des polymères

3
Conformation d’une chaîne unique
Masse moléculaire M Longueur de la chaîne étirée L Molécule linéaire très longue

4
Conformation d’une chaîne unique
Cette chaîne, sous l’effet de l’agitation thermique, va avoir des conformations complexes qui évolue constamment au cours du temps

5
Conformation d’une chaîne unique
L’étendue spatiale de la chaîne est beaucoup plus petite que sa longueur L. Soit L sa longueur curvilinéaire, la relation est : <R02>=L.lK lK = Longueur de Kuhn R0 Valeur moyenne

6
Conformation d’une chaîne unique
Polymères « classiques » : R0/M1/20,1-0,05 en nm/g1/2 (voir Polymer Handbook) M= g R0 10 nm Polymères semi-rigide Poly (n-hexyl isocyanate) M= g R0=100 nm
 M= g R0 10 nm. Polymères semi-rigide. Poly (n-hexyl isocyanate) M= g R0=100 nm.")
7
Entropie et élasticité de chaîne
Supposons une chaîne fixée aux deux extrémités. Elle se tortille sous l’effet de l’agitation thermique. En moyenne, elle exerce une force attractive entre les deux parois L Cette force, d’origine entropique vaut : F = L kBT/R02 Energie thermique Distance moyenne bout à bout

8
Entropie et élasticité de chaîne
Cette force microscopique, est responsable de l’élasticité caoutchoutique L’agitation thermique des chaînes tend à les rendre non étirée. Il faut donc fournir une force pour maintenir une déformation. Cette force est proportionnelle à la température. Ainsi un élastique est un des rares systèmes qui devient plus difficile à déformer quand on le chauffe

9
Entropie et élasticité de chaîne
Le module élastique d’un réseau vaut alors : G’=kBT/x3 Où x est la taille de la maille du réseau x points de réticulation

10
Dynamique d’une chaîne
A quelle vitesse bouge une chaîne ? Le rayon bout à bout évolue sur un temps caractéristique égal à : t = L2.h/kB.T viscosité Energie thermique C’est ce qu’on appelle un comportement de type Rouse

11
Dynamique d’une chaîne
Ainsi l’étendue spatiale (la distance moyenne bout à bout) croit plus lentement que la masse (comme M1/2) Mais le temps typique des fluctuations augmente plus vite que la masse ( comme M2)
 croit plus lentement que la masse (comme M1/2) Mais le temps typique des fluctuations augmente plus vite que la masse ( comme M2)")
12
Conformation et dynamique d’une chaîne unique
Il faut exercer une force Je déforme Si je ne maintiens pas la chaîne elle relaxe

13
Conclusion de cette partie
On a considéré qu’une chaîne idéale « dans le vide » et « fantôme » c’est à dire ne se voyant pas elle même. On va regarder les modifications apportée par la présence du solvant et d’autres chaînes

14
Chaîne en bon solvant Lorsqu’une chaine est dans un « bon solvant », le solvant qui aime le contact avec la chaîne à tendance à la « gonfler »

15
Chaîne en bon solvant compromis :
Energie gagnée avec les contacts chaînes/solvant Entropie perdue par le « gonflement » de la chaîne Le compromis donne une loi de croissance distance bout à bout/longueur différente : R0 =lK (L/lK)0.6 L’augmentation de taille avec la longueur est légèrement plus rapide
0.6. L’augmentation de taille avec la longueur est légèrement plus rapide.")
16
Chaîne en bon solvant Dans le Polymer Handbook
On trouve les relations R0 =Ma Pour les différents solvants : a varie de 0.5 en solvant « neutre » ou théta, à 0.6 en bon solvant, et jusqu’à 1 (à cause des effets electrostatiques)
")
17
Chaîne en « vrai » solvant
Le problème des interactions hydrodynamique Une particule que se déplace dans un solvant, induit un écoulement autour d’elle

18
Chaîne en « vrai » solvant
Le problème des interactions hydrodynamique Lorsqu’un chaîne bouge (sous l’effet de l’agitation thermique) , le mouvement se propage plus facilement à cause des interactions hydrodynamique.
 , le mouvement se propage plus facilement à cause des interactions hydrodynamique.")
19
Chaîne en « vrai » solvant
La chaîne se comporte plus comme « un ballon rempli d’eau dans l’eau » et le temps de relaxation ne varie plus comme L2 mais comme L. C’est ce qu’on appelle un comportement de type Zimm (par rapport à Rouse )
")
20
Chaînes enchevétrées (blobs)
En augmentant la concentration les chaînes s’enchevètrent. On appelle ce régime le régime « semi-dilué »

21
Chaînes enchevétrées A cette échelle une chaîne se voit elle même
Aux grandes échelles elle est piégée par ses voisines

22
mouvement = la reptation
Chaînes enchevétrées mouvement = la reptation Le temps pour une chaîne pour sortir de son « tube » varie comme M3,3 , et atteint facilement la seconde

23
Conclusion notions de bases
Une chaîne polymère est un objet soumis à une agitation Brownienne qui la fait changer de configuration Elle constitue une pelote qui est beaucoup plus petite que sa longueur étirée Elle résiste par une force de rappel à tout étirement (élasticité) Ses mouvements sont très lents (surtout si elle est enchevêtrée) Ce sont l’élasticité des chaînes et leurs dynamiques qui vont déterminer les propriétés mécaniques des systèmes
 Ses mouvements sont très lents (surtout si elle est enchevêtrée) Ce sont l’élasticité des chaînes et leurs dynamiques qui vont déterminer les propriétés mécaniques des systèmes.")
24
Notions de rhéologie de base
Contrainte/déformation/cisaillement Fluides viscoélastiques Origine des contraintes

25
A A C C B B Introduction, Microscopiquement, une déformation rapproche (A/B) et éloigne(B/C) des objets du fluide. Ces objets étant en interaction, les distances entre eux variant, ceci entraîne à l’échelle macroscopique l’apparition d’une contrainte.
 et éloigne(B/C) des objets du fluide. Ces objets étant en interaction, les distances entre eux variant, ceci entraîne à l’échelle macroscopique l’apparition d’une contrainte.")
26
Introduction, A A C C B B Microscopiquement, une déformation rapproche (A/B) et éloigne(B/C) des objets du fluide. Ces objets étant en interaction, les distances entre eux variant, ceci entraîne à l’échelle macroscopique l’apparition d’une contrainte.
 et éloigne(B/C) des objets du fluide. Ces objets étant en interaction, les distances entre eux variant, ceci entraîne à l’échelle macroscopique l’apparition d’une contrainte.")
27
Déformation de cisaillement simple
u d Structure initiale Déformation = u/d - La déformation s’exprime comme la variation du déplacement dans l’espace : = u/d u & d ont la dimension d’une longueur. Donc est sans dimension, c’est un nombre. On l’exprime parfois en %.

28
Dans un écoulement stationnaire
Vitesse V d =V/ d Le taux de cisaillement : son unité est l’unité d’une fréquence, elle s’exprime en seconde –1. Un taux de cisaillement de 1 s-1 signifie qu’en une seconde, le système a été déformé d’une unité (ou de 100%). Le point signifie dérivée par rapport au temps
. Le point signifie dérivée par rapport au temps.")
29
En général, lorsque l’on déforme instantanément un système de 100%, celui-ci oublie sa structure initiale. Donc si l’on applique un taux de cisaillement de x s-1, on « efface » l’histoire en un temps de 1/x seconde. Si un système a un temps de relaxation naturel égal à tr , alors si on applique un cisaillement égal à tel que tr est grand devant 1, le système n’a pas le temps de relaxer et sa structure est profondément affectée par le cisaillement : tr <<1 tr >>1

30
Contrainte de cisaillement simple
Pour exprimer la «force » exercée par le fluide, on utilise la contrainte, qui est une force par unité de surface. -F Surface S F s=F/S L’unité de la contrainte est la même que l’ unité de pression, c’est le Pascal 1 Pascal = 1 Newton/mètre2 = 10-5 atmosphère

31
Viscosité V Lorsque l’on applique un taux de cisaillement constant dans le temps, de nombreux fluides (tous les fluides de petites molécules dans leur phase liquide ou gazeuse en fait), répondent avec une contrainte proportionnelle au taux de cisaillement. On nomme ces fluides des fluides Newtonien. Ils sont caractérisé par la relation : = Le coefficient est appelé la viscosité. Son unité est le Pascal seconde, noté Pa.s. L’eau a une viscosité de 10-3 Pa.s Un miel « visqueux » de l’ordre de 1 Pa.s
, répondent avec une contrainte proportionnelle au taux de cisaillement. On nomme ces fluides des fluides Newtonien. Ils sont caractérisé par la relation : = Le coefficient est appelé la viscosité. Son unité est le Pascal seconde, noté Pa.s. L’eau a une viscosité de 10-3 Pa.s. Un miel « visqueux » de l’ordre de 1 Pa.s.")
32
Module élastique d u Lorsque l’on applique par contre à un corps solide une déformation, celui-ci répond souvent par une contrainte proportionnelle à la déformation imposée, on l’appelle solide Hookéen. On a donc : =G G est appelé le module élastique. Il a la même unité que la contrainte, c’est à dire le Pascal (la déformation n’a pas d’unité). Module d’un gel mou : 103 Pa D’un élastomère : Pa D’un polymère solide : 109 Pa
. Module d’un gel mou : 103 Pa. D’un élastomère : Pa. D’un polymère solide : 109 Pa.")
33
Origines du module élastique
G kBT/3 Emulsions à 50% (indetectable à l’oeil) G Pa micron 4 Pa nm 4 103 Pa 10 nm 4 M Pa 1 nm 4 G Pa 1 angstrom Gel (solutions semi-diluée de polymères réticulés) Elastomère bien réticulé étendue spatialle des fluctuations kB constante de Boltzmann = T température en Kelvin Solide dur
 G Pa 1 micron. 4 Pa 100 nm Pa 10 nm. 4 M Pa 1 nm. 4 G Pa 1 angstrom. Gel (solutions semi-diluée de polymères réticulés) Elastomère bien réticulé. étendue spatialle des fluctuations. kB constante de Boltzmann = T température en Kelvin. Solide dur.")
34
Notions de viscoélasticité
t=0 temps Réponse élastique aux temps courts (module G) relaxation t Relaxation (temps t) t temps t=0
 relaxation. t. Relaxation (temps t) t. temps. t=0.")
35
Linéarité t=0 temps temps
Chaque déformation induit une contrainte qui va s’additionner aux précédentes et relaxer (indépendament des autres)
")
36
Relation viscosité/élasticité
La déformation crée de la contrainte Mais cette contrainte est oubliée après t Seule la contrainte créée pendant le tr (càd t ) précédent contribue = Gt d’où la relation = G.t Relation exacte dans le cas d ’un fluide Maxwellien
 précédent contribue. = Gt. d’où la relation = G.t. Relation exacte dans le cas d ’un fluide Maxwellien.")
37
Relation viscosité/élasticité
Ainsi la viscosité d’un fluide viscoélastique est le produit du temps de relaxation par le module élastique « instantanné » = G.t

38
En écoulement oscillant :
En oscillation En écoulement oscillant : g = g0. cos(wt) s =s0.cos(wt-f) t
 s =s0.cos(wt-f) t.")
39
Solide élastique : s = G.g
En oscillation g = g0. cos(wt) s =s0.cos(wt-f) t Solide élastique : s = G.g Fluide visqueux : s = h.g
 s =s0.cos(wt-f) t. Solide élastique : s = G.g. Fluide visqueux : s = h.g.")
40
Le module viscoélastique : G* = G’+i G’’
En oscillation Solide élastique : s = G.g Fluide visqueux : s = h.g En général la situation est mixte : s(t) = G’.g cos(wt) - G’’ g sin(wt) Module de perte (G’’= -wh) Module élastique Le module viscoélastique : G* = G’+i G’’
 = G’.g cos(wt) - G’’ g sin(wt) Module de perte (G’’= -wh) Module élastique. Le module viscoélastique : G* = G’+i G’’")
41
(fluide de Maxwell ) relaxation de s en e-t/t
En oscillation (fluide de Maxwell ) relaxation de s en e-t/t Log G’ Module « au plateau » Log G’’ élastique t - 1 Log w visqueux
 relaxation de s en e-t/t. Log G’ Module « au plateau » Log G’’ élastique. t - 1. Log w. visqueux.")
42
En oscillation (fluide de Maxwell ) relaxation de s en e-t/t
 relaxation de s en e-t/t")
43
Barrière d’énergie à franchir : E
Modèle d’Eyring A l’équilibre temps t Energie E Déformation Barrière d’énergie à franchir : E Temps de saut :

44
Modèle d’Eyring Sous contrainte s Energie Déformation favorable
défavorable Energie Déformation

45
v est le volume d’activation
Modèle d’Eyring Déformation Energie Saut + v est le volume d’activation Saut -

46
Modèle d’Eyring Energie Déformation Taux de cisaillement: Saut +

47
Modèle d’Eyring Taux de cisaillement:
Energie Déformation Taux de cisaillement: la viscosité diminue quand la température augmente selon une loi d’Arrhénius Fluide visqueux : temps de relaxation module élastique

48
Modèle d’Eyring Sous contrainte s +
La dynamique est faiblement modifiée par la contrainte La viscosité est le produit du temps de relaxation à l’équilibre par le module élastique temps de relaxation en l’absence de contrainte module élastique

49
Force normale Création de contrainte
Rotation de la contrainte « mémorisée » La force normale écarte les plaques, et induit une tension de ligne sur les lignes de courants

50
Force normale Manifestation : Montée sur les axes
(contraction des lignes de courant) Gonflement en sortie de filière
 Gonflement en sortie de filière.")
51
Viscoélasticité/écoulement ?
Log G’ Log G’’ Module « au plateau » élastique t - 1 Log w visqueux

52
Relations écoulement oscillant/stationnaire
Relation G ‘’ écoulement (viscosité Newtonienne) Relation G’ force normale (Laun) y x Valable pour les fluides sans contrainte seuil ni désordre gelé
 Relation G’ force normale (Laun) y. x. Valable pour les fluides sans contrainte seuil ni désordre gelé.")
53
Conclusion notion de rhéologie
La rhéologie est controlée par : Le module élastique (au plateau ou au temps court) Le temps de relaxation de la contrainte La viscosité est le produit des deux quantités L’analyse précise du (ou des ) phénomène(s) passe par l’étude du module viscoélastique
 Le temps de relaxation de la contrainte. La viscosité est le produit des deux quantités. L’analyse précise du (ou des ) phénomène(s) passe par l’étude du module viscoélastique.")
54
Origine microscopique de la contrainte
Comment relier le comportement macroscopique à la strcture et la dynamique microscopique A A C C B B

55
Deux types de contributions microscopiques
Contribution hydrodynamique Traduit l ’écoulement complexe du solvant Contribution thermodynamique En écoulement Pression osmotique, élasticité entropique, interactions électrostatiques

56
Contrainte hydrodynamique
Relation d’Einstein : viscosité des suspensions de sphères dures Terme d’interaction F = fraction volumique des sphères

57
Contrainte thermodynamqiue
Toute structure rendue anisotrope par l’écoulement induit une contrainte opposée à l’écoulement. Pression osmotique anisotrope, élasticité entropique de chaînes étirées, interactions électrostatiques etc... Contrainte due à l’anistropie des chaînes

58
Pour des particules d ’un micron dans l ’eau
Le rapport de ces deux types de contrainte est exprimé par le nombre de Péclet Pour des particules d ’un micron dans l ’eau le taux de cisaillement où Pe=1 vaut 1 s-1 taux de cisaillement r rayon des objets viscosité kB constante de Boltzmann = T température en Kelvin

59
Comment les séparer t=0 t McKey (1995) temps
Contrainte hydrodynamique t Contrainte thermodynamique temps La s hydro disparait dés que l’écoulement cesse. La s thermo disparait quand la structure revient à l’équilibre Viscoélasticité

60
Wagner Isoler les origines de contraintes dans des suspensions de sphères dures colloïdales

61
A fort écoulement, l ’hydrodynamique
domine entropique Cela peut conduire à des rhéoépaississements

62
Origine microscopique des contraintes
Conclusion Les contraintes d’origine thermodynamique (élasticité au temps courts) dominent à faible taux de cisaillement. Elles créent la viscoélasticité Les contraintes d’origine hydrodynamique (écoulement de solvant) dominent aux forts taux de cisaillement
 dominent à faible taux de cisaillement. Elles créent la viscoélasticité. Les contraintes d’origine hydrodynamique (écoulement de solvant) dominent aux forts taux de cisaillement.")
63
Conclusion notions de base rhéo
Contraintes hydrodynamiques : pas de viscoélasticité Contraintes thermodynamiques : viscoélasticité avec deux grandeurs : Le module élastique aux temps courts Le temps de relaxation de la structure

64
Rhéologie des polymères simples
Appliquer les notions précédentes aux polymères pour comprendre leur rhéologie.

65
Solutions diluées A cause des interactions hydrodynamiques dans la chaîne, une chaîne se comporte comme une sphère pleine effet hydrodynamique relation d’Einstein Rayon hydrodynamique RH

66
Solutions diluées La mesure de la viscosité à très faible dilution permet d’obtenir le rayon hydrodynamique (et donc indirectement la masse)
")
67
Polymères enchevétrés
A cette échelle chaîne libre Aux grandes échelles elle est piégée par ses voisines (pendant un certain temps)
")
68
Polymères enchevétrés
Module élastique aux temps courts x G kBT/3 G 4 Pa nm 4 103 Pa 10 nm 4 M Pa 1 nm

69
Polymères enchevétrés
Reptation : t M3.3 Relaxation de la contrainte

70
Polymères enchevétrés
Au bilan : un fluide visco-élastique Reptation Contient les effets de module élastique et de frottement solvant/polymère

71
Relaxation de contrainte

72
viscoélasticité

73
viscoélasticité )
")
74
viscoélasticité

75
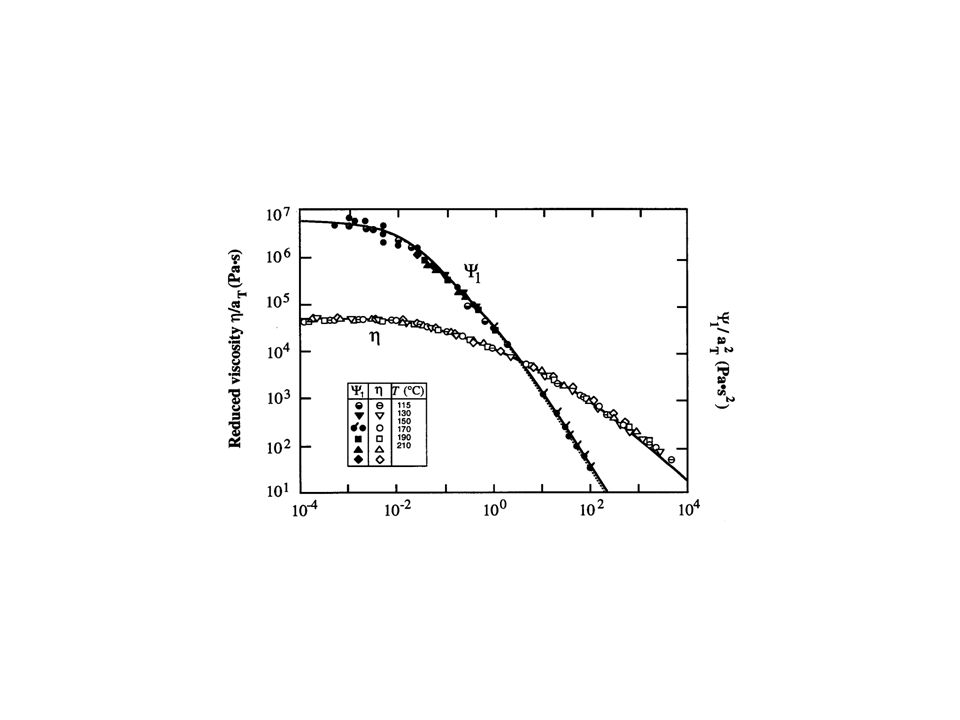
viscosité

76
Viscoélasticité/écoulement ?
Log G’ Log G’’ Module « au plateau » élastique t - 1 Log w visqueux

77
En cisaillant trop rapidement, les chaînes n’ont pas le temps
de se réenchevêtrer Log Log 1/tr

79
Les polymères associatifs
Elasticité G kBT/3 = distance entre enchevêtrements tr temps de vie de l ’agrégat tr temps de relaxation d’une chaîne

80
Régime « relaxation de chaîne»
Visco-élasticité Log G’ Log G’’ Log w Régime « relaxation de chaîne» Régime de « Maxwell »

81
Extensibilité limite ou augmentation des contacts ? Log Log 1/tr

82
Suspensions colloïdales stables
particules en suspensions dans un solvant, de diamètre compris entre 10nm et 1 micron, stabilisée,

83
La viscosité à faible contrainte augmente avec la fraction volumique
Suspensions stables La viscosité à faible contrainte augmente avec la fraction volumique A forte contrainte, on a successivement une diminution puis une augmentation de la viscosité

84
rappel : deux origines pour la contraintes
écoulement hydrodynamique entropie (pression osmotique)
")
85
Suspensions stables Blocage par les films d’eau intraparticulaires
Ecoulement qui ne perturbe pas la structure, contraintes hydrodynamiques et entropiques changement de structure qui facilite l’écoulement (queue leu leu)
")
86
Suspensions de sphères dures
Suspensions diluées : hydrodynamique du solvant (loi d’Einstein) Suspensions concentrées viscosité de la suspension S viscosité du solvant fraction volumique en objets C fraction à lempilement compact (64% si monodisperse)
 Suspensions concentrées. viscosité de la suspension. S viscosité du solvant. fraction volumique en objets. C fraction à lempilement compact (64% si monodisperse)")
87
Sphères molles assez concentrées
Les couches s’interpénètrent : Le rayon effectif diminue lorsque la concentration augmente D ’après C. Allain

88
Silice 9 nm pH=9 .5 e / nm2 c = [NaCl]mol/l Sphères molles On rescale avec un rayon effectif Fraction effective : on tient en compte la taille du nuage électrostatique
![Silice 9 nm pH=9. .5 e / nm2. c = [NaCl]mol/l. Sphères molles. On rescale avec un rayon. effectif.](http://slideplayer.fr/slide/2606449/9/images/88/Silice+9+nm+pH%3D9.+.5+e+%2F+nm2.+c+%3D+%5BNaCl%5Dmol%2Fl.+Sph%C3%A8res+molles.+On+rescale+avec+un+rayon.+effectif..jpg "Fraction effective : on tient en compte. la taille du nuage électrostatique.")
89
suspensions stables Avec l’augmentation de la viscosité, un module élastique apparaît (proche du module de compression osmotique) C’est l’augmentation simultanée du module (pression osmotique) et du temps (gêne des mouvements par encombrement) qui sont responsables de l’augmentation de la viscosité
 et du temps (gêne des mouvements par encombrement) qui sont responsables de l’augmentation de la viscosité.")
90
suspensions très concentrées
Il y a un seuil d’écoulement qui apparaît La dynamique au repos est très lente Mouvement sous contrainte seulement

91
suspensions très concentrées
contrainte Energie Déformation Contrainte seuil En l’absence de dynamique rapide au repos, le système présente une contrainte seuil

92
Suspensions stables : conclusions
En dilué : Effet de rayon effectif Divergence de la viscosité lorsqu’on augmente la concentration Apparition d’une contrainte seuil, signe du blocage des mouvements Browniens

93
Conclusion générale En rhéologie linéaire :
La viscosité est le produit du module élastique du système par le temps de relaxation naturel de la structure Si le temps est dans un domaine accessible par un rhéomètre (1000s -0,01 s), le fluide apparaît comme viscoélastique Si le temps est très grand, le fluide présente un seuil d’écoulement Si le temps est très court ( liquide simple, systèmes dilués) le fluide est Newtonien
, le fluide apparaît comme viscoélastique. Si le temps est très grand, le fluide présente un seuil d’écoulement. Si le temps est très court ( liquide simple, systèmes dilués) le fluide est Newtonien.")
94
En rhéologie non-linéaire :
Conclusion générale En rhéologie non-linéaire : Lorsque l’inverse du taux de cisaillement (temps caractéristique de l’écoulement) devient plus grand quele temps de relaxation naturel de la structure Le système change de structure et de propriétés rhéologique, mais il n’y a pas de règles générales
 devient plus grand quele temps de relaxation naturel de la structure. Le système change de structure et de propriétés rhéologique, mais il n’y a pas de règles générales.")
Présentations similaires



 Chaîne infinie doscillateurs couplés 1) Le modèle.>")

 de longueur r et d'extrémité fixe O. Si nous appliquons à M.>")












 Les ondes mécaniques périodiques>")
