Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Technologie et principes
TOMODENSITOMETRIE Technologie et principes Christophe AURIAC Manipulateur Cadre de Santé Service de Neuro-Radiologie Hôpital Bretonneau CHRU de TOURS

2
DÉFINITION La tomodensitométrie X (TDM) ou scanographie (CT pour les Anglo-saxons) est une méthode de diagnostic radiologique tomographique permettant d’obtenir des coupes transversales, reconstruites à partir de la mesure du coefficient d’atténuation du faisceau de rayons X dans le volume étudié
 ou scanographie (CT pour les Anglo-saxons) est une méthode de diagnostic radiologique tomographique permettant d’obtenir des coupes transversales, reconstruites à partir de la mesure du coefficient d’atténuation du faisceau de rayons X dans le volume étudié.")
3
I HISTORIQUE 1895 ROENTGEN découvre les rayons X
1963 Reconstruction par ordinateur d’une image en coupe d’un volume radio actif grâce à des détecteurs scintillants, CORMACK (Afrique du Sud) 1967 : début des travaux de Godfrey Newbold HOUNSFIELD pour EMI (GB) 1971/1972 : première communication de HOUNSFIELD la première coupe exécutée au ATKINSON MORLEY’S Hospital de LONDRES (scanner cérébral) 1974/1975 : LEDLEY (USA) étend la technique au “corps entier”
 1967 : début des travaux de Godfrey Newbold HOUNSFIELD pour EMI (GB) 1971/1972 : première communication de HOUNSFIELD. la première coupe exécutée au ATKINSON MORLEY’S Hospital de LONDRES (scanner cérébral) 1974/1975 : LEDLEY (USA) étend la technique au corps entier")
4
Une légende :Hounsfield et les Beatles ?
Né en 1919, Hounsfield était ingénieur dans la firme EMI Ltd, à Londres, qui ne produisait que des disques phonographiques et des fournitures électroniques. Prix Nobel de Médecine en 1979 Il décède le 20/08/2004

5
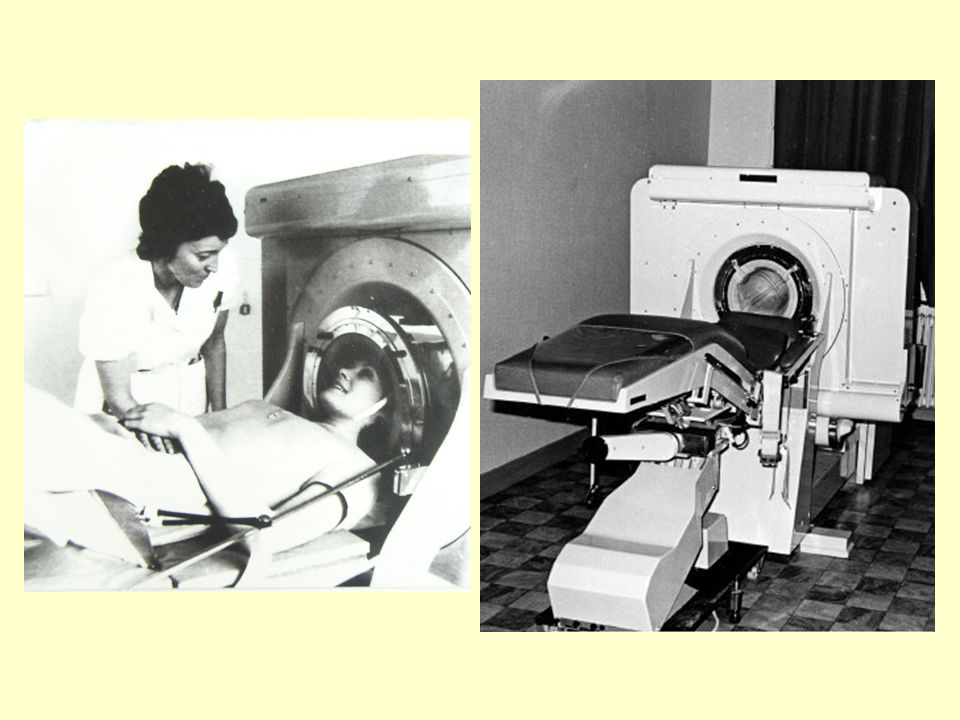
Le prototype de GN HOUNSFIELD
Un tube à rayon X et un détecteur unique. Acquisition d’une coupe : 6 minutes Données informatiques recueillies sur des cartouches magnétiques. Les cartouches étaient transférées le soir dans le laboratoire d’EMI, où la reconstruction des différentes images se faisait durant la nuit. Le premier modèle commercialisé sera équipé de 2 détecteurs adjacents permettant l’acquisition de 2 coupes : l’Emiscanner Depuis, grâce aux progrès informatiques, augmentation des performances

6
II LES DIFFÉRENTES GÉNÉRATIONS
A partie du prototypes de Hounsfield, plusieurs techniques vont apparaître. La principale différence réside dans le principe géométrique de l’acquisition Ces différentes évolutions ont permis de classer les modèles en 4 générations

7
Première génération : système à rotation / translation et détecteur unique
Seul le crane peut être exploré (casque d’eau) Il correspond au prototype de Hounsfield : 1 tube, 1 détecteur unique Temps d’acquisition 6 minutes Temps de reconstruction: une nuit
 Il correspond au prototype de Hounsfield : 1 tube, 1 détecteur unique. Temps d’acquisition 6 minutes. Temps de reconstruction: une nuit.")
8
Principe de fonctionnement
translation de l’ensemble tube-détecteurs en regard du volume à étudier avec émission du rayonnement X rotation de l’ensemble sans émission de rayon d’environ 1° translation avec émission de rayons X etc... sur 180°

9
L’EMI SCANNER

11
Résultats 4 min par rotation 8 niveaux de gris Matrice 80 x 80
Reconstruction : 1 nuit

12
Deuxième génération : système à rotation / translation et détecteurs multiples
Ce type d’appareillage va permettre l’abaissement du temps d’acquisition pour une coupe et ainsi l’exploration des organes mobiles. En 1974, les premiers scanners corps entier étaient de ce type. Temps d’acquisition pour une coupe : 20 secondes Temps de reconstruction : 5 min Ils ne sont plus fabriqués de nos jours

13
Principe de fonctionnement
Même système que le précédent mais détecteurs multiples (10 à 60 détecteurs).
.")
14
Troisième génération : système à rotation tube / détecteurs
Développé à partir de Équipe la majorité des scanners actuels A permis l’exploration de l’abdomen Temps d’acquisition descendu à 0.37 sec Reconstruction en temps réel (séquentiel)
")
15
Principe de fonctionnement
Le mouvement de translation des précédentes générations a disparu Les nombreux détecteurs (200 à 1000) sont disposés sur une rampe solidaire du tube à rayons X par un bâti rigide. Rotation de l’ensemble tube-détecteurs autour du volume à explorer Le volume à explorer est entièrement couvert par le faisceau de rayon X Il existe de nombreuse évolution du système
 sont disposés sur une rampe solidaire du tube à rayons X par un bâti rigide. Rotation de l’ensemble tube-détecteurs autour du volume à explorer. Le volume à explorer est entièrement couvert par le faisceau de rayon X. Il existe de nombreuse évolution du système.")
16
Quatrième génération : système à rotation du tube et détecteurs fixes
Ce système apparaît en même temps que les système de 3e génération. Ils ont longtemps été commercialisé par une seule société: Picker Les performances sont très proches de la 3e génération En voie de disparition

17
Principe de fonctionnement
Les détecteurs (4000 à 5000) sont disposés en couronne autour du volume à étudier. Le tube à rayons X, va tourner à l’intérieur ou à l’extérieur de cette couronne en émettant continuellement des rayons X sur une rotation. Le faisceau de rayons X couvre entièrement le volume à explorer.
 sont disposés en couronne autour du volume à étudier. Le tube à rayons X, va tourner à l’intérieur ou à l’extérieur de cette couronne en émettant continuellement des rayons X sur une rotation. Le faisceau de rayons X couvre entièrement le volume à explorer.")
18
Cas particulier : le scanner à canon à électrons (type Imatron)
Ce système ne possède plus de tube à rayons X mais un canon à électrons.. Ce système va permettre la suppression des mouvements mécaniques du tube à rayons X et la fin des problèmes d’échauffement de tube. De plus, les coupes sont obtenues avec une extrême rapidité (jusqu’à 17 coupes par seconde).
.")
19
Principe de fonctionnement
Le faisceau d’électrons émis va être dirigé vers une des anodes multiples disposées sur un demi-cercle. Le faisceau va donc subir une déviation suivant la polarité de ces anodes. En heurtant ces anodes, il va y avoir une production de rayons X Les rayons X, heurtent les détecteurs après avoir traversé le patient

20
Le système d’acquisition des données
Il comporte: Le générateur Le tube à rayons X Le système de détection Les systèmes de collimation Un statif ou Gantry

21
Le générateur Il fournit la haute tension alimentant le tube à rayons X. Leur puissance se mesure en kW (produit des kv par Ma). Le kilovoltage varie entre 110 kv et 140 kv. Le milliampérage varie de 100 mA à 500 mA en moyenne. Il doit permettre l’obtention d’une haute tension continue sans aucune variante de façon à obtenir au niveau du tube un faisceau monochromatique. Les premiers scanners utilisés pour l’exploration du crâne ne nécessitaient que des générateurs de faible puissance (10 à 20 mA par coupe). Les scanners actuels, très souvent à rotation continue, nécessitent quant à eux, des puissances de l’ordre de 50 kW.
. Les scanners actuels, très souvent à rotation continue, nécessitent quant à eux, des puissances de l’ordre de 50 kW.")
22
Implantation des générateurs
En plus d’une une évolution allant vers une miniaturisation et une augmentation de leur puissance, la localisation du générateur a été modifié. Générateur à distance : il est situé dans une armoire électrique. Les premiers scanners ont été équipés de générateurs de ce type. Le transfert de la haute tension se fait par câble. Générateur semi-embarqué : ils sont apparus avec les scanners à rotation continue. ils nécessitent le transfert d’une haute tension (20 à 40 kv) et fournissent à leur tour la haute tension de kv au tube. Ce transfert se faisant par un système de patins, les inconvénients sont nombreux (usure, arc électrique). Générateur embarqué : ils évitent tous les problèmes de transferts d’énergie.
 et fournissent à leur tour la haute tension de kv au tube. Ce transfert se faisant par un système de patins, les inconvénients sont nombreux (usure, arc électrique). Générateur embarqué : ils évitent tous les problèmes de transferts d’énergie.")
23
Transmission de la tension au tube
Sur les scanner à rotation alternée, par câble. Puis apparition de la technologie « slip ring » pour les systèmes à rotation continue

24
Le tube à rayons X C’est la pièce maîtresse du scanner.
Les premiers scanners crâniens étaient équipés de tube à anode fixe en cuivre. Les tubes actuels sont à anode tournante en graphite et tungstène. Le tube doit pouvoir résister à des contraintes thermiques très élevées (99 % de l’énergie fournie se transforme en chaleur, 1 % en rayons X). Ils sont donc refroidis par des systèmes à huile, eau et air.
. Ils sont donc refroidis par des systèmes à huile, eau et air.")
25
Caractéristiques vitesse de rotation d’anode = 2500 à 10000 tours/mn
capacité calorifique = de 0.8 à 8 Muc suivant les technologies dissipation calorifique ou taux de refroidissement = 1 à 5 MUC/mn suivant les technologies diamètre d’anode =150 a 200 mm Comme pour la radiologie conventionnelle, les tubes peuvent être équipés de deux foyers :un foyer fin pour l’étude de l’organe nécessitant une bonne résolution spatiale (par exemple 0.75x1.4 mm), un gros foyer pouvant délivrer une dose plus importante (par exemple 1.5x1.4 mm). Note: la quantité maximale que peut supporter un tube peut se mesurer en Joules, en Watt/seconde ou en UC (Watt/sec x coefficient dépendant du type d’alimentation)
, un gros foyer pouvant délivrer une dose plus importante (par exemple 1.5x1.4 mm). Note: la quantité maximale que peut supporter un tube peut se mesurer en Joules, en Watt/seconde ou en UC (Watt/sec x coefficient dépendant du type d’alimentation)")
26
Capacité calorifique Représente la quantité de chaleur que le tube peut supporter Se mesure en MUC ou KUC

27
Dissipation calorifique
Représente la quantité de chaleur que le tube est capable d’évacuer par minute ou taux de refroidissement Se mesure en MUC / minute

28
Technologie des tubes Parfois, les tubes ne comportent qu’un seul foyer ou sont équipés de foyer flottant (dispositif électronique permettant de faire varier la taille du foyer à partir d’un seul filament). Certains fabricants proposent des systèmes dits “dynamiques ” qui permettent par un mouvement du foyer de multiplier le nombre de mesure effectué. Le spectre des rayons X n’étant pas régulier, on ajoute une plaque de cuivre ou d’aluminium pour homogénéiser le faisceau (en général 2 à 3 mm d’aluminium).
. Certains fabricants proposent des systèmes dits dynamiques qui permettent par un mouvement du foyer de multiplier le nombre de mesure effectué. Le spectre des rayons X n’étant pas régulier, on ajoute une plaque de cuivre ou d’aluminium pour homogénéiser le faisceau (en général 2 à 3 mm d’aluminium).")
29
Évolution des tubes Le tube est soumis à une force centrifuge importante (13G, 5G pour un pilote de chasse) due à son poids élevée et à la vitesse de rotation (360°sur 0.5 sec). Réduire son poids permet d’atteindre de telle vitesse, cependant l’anode doit être la plus large possible (chaleur). Le tube doit évacuer la chaleur le plus rapidement possible et pouvoir résister à des températures élevées.
 due à son poids élevée et à la vitesse de rotation (360°sur 0.5 sec). Réduire son poids permet d’atteindre de telle vitesse, cependant l’anode doit être la plus large possible (chaleur). Le tube doit évacuer la chaleur le plus rapidement possible et pouvoir résister à des températures élevées.")
30
Tubes à forte capacité calorifique
Pour cela, un constructeur a mis au point un nouveau tube. En remplaçant les matériaux d’anode par un métal intégral, en supprimant la ddp entre l’anode et la gaine, en supprimant les électrons non transformés en Rx qui viennent frapper l’anode, en remplaçant les roulements à billes classiques par un système hydrodynamique (métal liquide), Toshiba a pu réduire le diamètre d’anode et ainsi alléger son tube en lui donnant des performances élevées : 7.5 Muc pour un taux de refroidissement de 1.4 Kuc par mn
, Toshiba a pu réduire le diamètre d’anode et ainsi alléger son tube en lui donnant des performances élevées : 7.5 Muc pour un taux de refroidissement de 1.4 Kuc par mn.")
31
Tubes à forte dissipation calorifique
Augmenter la dissipation calorifique 5 MUC / mn avec une capacité calorifique faible 0.8 MUC : le Straton de Siemens, Une anode de 12 cm de diamètre, longueur du tube 20 cm Un avantage : gain en poids, un problème sa limite en Ma

32
Principe de fonctionnement
Sur un tube standard, le faisceau d’électrons est directement dirigé vers l’anode.

33
Principe de fonctionnement
Le faisceau d’électron est dévié par deux bobines de déflection

34
Principe de fonctionnement
Une plus grande surface en contact avec l’huile de refroidissement

35
Principe de fonctionnement

36
Le foyer dynamique Il permet de doubler les mesures sur l’axe X – Y
Rappel : axe XY axe Z

37
Le foyer dynamique : Oversampling sur l’axe X-Y
Il permet la technique dite de l’oversampling Pour une projection angulaire, réalisation de deux mesures

38
Le système de détection
C’est un organe essentiel pour la qualité de l’image. Pour être efficaces, ils doivent avoir : une faible rémanence une réponse linéaire une grande efficacité de détection une surface active importante une bonne stabilité dans le temps Ils peuvent être de technologie différentes

39
Détecteurs solides ou à cristaux scintillants
Sous l’effet des rayons X, les cristaux scintillent et émettent des photons lumineux. Ces photons lumineux sont à leurs tours captés par une photocathode qui va donner naissance à un flux électronique. Le flux d’électrons créé est alors amplifié par un système de dynodes (électrode) le rendant ainsi mesurable. Les plus anciens cristaux utilisés étaient en iodure de césium puis tungstate de cadmium (rémanence importante). Les cristaux les plus modernes utilisent des céramiques. Les détecteurs solides sont à l’heure actuelle les plus efficaces et les plus performants
 le rendant ainsi mesurable. Les plus anciens cristaux utilisés étaient en iodure de césium puis tungstate de cadmium (rémanence importante). Les cristaux les plus modernes utilisent des céramiques. Les détecteurs solides sont à l’heure actuelle les plus efficaces et les plus performants.")
40
Détecteur à gaz ou chambre d’ionisation
Chaque chambre contient un gaz rare (Xénon le plus souvent) sous une pression de 20 à 25 bars. Ces chambres sont disposées les unes à côté des autres sur une rampe. Elles sont au nombre de 10 à 20 par centimètre.Les rayons X provoquent une ionisation du Xénon. Les ions ainsi produits sont captés par des électrodes et engendrent un courant électrique. Les différentes chambres sont séparées entre elles par de fines cloisons polarisées (en tungstène) qui vont transmettre le courant à un système d’amplification.Ces cloisons jouent aussi un rôle de grille “antidiffusante” en étant focalisées vers le foyer du tube à rayons X.
 sous une pression de 20 à 25 bars. Ces chambres sont disposées les unes à côté des autres sur une rampe. Elles sont au nombre de 10 à 20 par centimètre.Les rayons X provoquent une ionisation du Xénon. Les ions ainsi produits sont captés par des électrodes et engendrent un courant électrique. Les différentes chambres sont séparées entre elles par de fines cloisons polarisées (en tungstène) qui vont transmettre le courant à un système d’amplification.Ces cloisons jouent aussi un rôle de grille antidiffusante en étant focalisées vers le foyer du tube à rayons X.")
41
Évolutions technologiques
Les appareillages les plus récents utilisent des détecteurs à semi conducteurs. Ils sont composés d’iodure de mercure

42
Transmission des données
Elle se fait par des systèmes à infra-rouge pendant la rotation. Présence de capteurs en différents points de l’anneau

43
Les systèmes de collimation
L’intérêt de la collimation est : de limiter l’irradiation du patient et le rayonnement diffusé de fixer l’épaisseur de coupe Il existe une collimation primaire et une collimation secondaire. Parfois une 3e collimation a pour but de limiter l’effet de volume partiel

44
Collimation primaire Elle est composée de plaque de plomb et est située après le tube à rayons X. Son but est de limiter le rayonnement diffusé et de fixer l’épaisseur de la coupe : ces plaques sont donc mobiles et à écartement variable.

45
Collimation secondaire
Cette collimation est placée en avant des détecteurs et est destinée à arrêter le rayonnement diffusé. Les cloisons de cette collimation sont alignées sur les cloisons qui séparent les différents détecteurs et sont focalisées vers le foyer du tube.

46
Collimation post-patient
Certains constructeurs proposent sur leurs modèles, une troisième collimation situé entre le patient et les détecteurs. Cette collimation est alignée sur la collimation primaire et est variable suivant l’épaisseur de coupe. Elle a pour but de limiter l’effet de volume partiel.

47
Étalonnage et calibration
Pour que les mesures soient faites avec précision, l’intensité du faisceau initial Io est mesurée, pour chaque coupe, soit par un détecteur situé prés du tube, soit par les détecteurs les plus excentrés sur la rampe de détection. A ne pas confondre avec la calibration, qui consiste à faire des coupes dans le vide pour réetalonner les détecteurs avec des constantes d’acquisition variables en réalisant des coupes dans le vide. La calibration est faite une à plusieurs fois par semaine suivant les modèles.

48
Étalonnage, mesure de Io
Io est mesurée par des détecteurs en position excentrée ou près du tube. Les rayons X qu ’ils reçoivent ne doivent subir aucune atténuation. 32 détecteurs chez GE sur la rampe de détection 8 pour philips, 2 pour Toshiba

49
Fréquence de calibration
Elle varie suivant les constructeurs pour certains, elle est obligatoire après un arrêt complet. Sinon, GE et Siemens 1 par jour, Marconi et Toshiba 1 par semaine, philips 1 par 4 h.

50
Le moteur de rotation Classiquement, les premier moteurs générant la rotation du bâti tube et détecteurs transmettaient le mouvement par un système de courroie. A une époque, la partie mobile devient le moteur : c’est le moteur linéaire à champ magnétique Sur les derniers modèles (0,4sec), le système à courroie est toujours existant
, le système à courroie est toujours existant.")
51
Le statif Il est composé du système d’acquisition des données et du lit mobile. Le système d’acquisition des données comprend : le tube à rayons X, le système de détection, le système de refroidissement, parfois le générateur Le tunnel doit être le plus large possible pour le confort du malade (environ 70 cm). Il doit être évasé pour diminuer la sensation d’enfermement du patient Le diamètre de la zone d’exploration est inférieur au diamètre du tunnel (environ 50 cm).
. Il doit être évasé pour diminuer la sensation d’enfermement du patient. Le diamètre de la zone d’exploration est inférieur au diamètre du tunnel (environ 50 cm).")
52
Statif Son inclinaison est variable de + 20° à + 30° en moyenne dans les deux sens. Le lit d’examen est mobile. Il doit descendre le plus bas possible afin de faciliter le transfert de malade et avoir le plus grand débattement possible à l’intérieur du statif (150 a 170 cm) Certains constructeurs proposent une inclinaison latérale du lit (swivel).
 Certains constructeurs proposent une inclinaison latérale du lit (swivel).")
53
Système de centrage et d’assistance à la ponction
Le tunnel peut être équipé d’un système lumineux de repérage, utilisé pour centrer le patient D’un système d’assistance à la ponction

54
V Acquisition des données
L’image numérique plane Surview, scoutview, topogramme, mode radio, pilote … Il sert au repérage des coupes, à éviter des zones sensibles ou d’artefacts. L’ensemble tube-détecteurs est fixe et est en position antéro-postérieure pour un topogramme de face en position latérale pour un topogramme de profil. La table se déplace alors longitudinalement à l’intérieur du tunnel pendant une émission continue de rayons X. Sur les modèles actuels, il est possible d’effectuer des incidences obliques.

55
Acquisition de la coupe
La plupart des modèles utilisés sont de la 3ème génération. C’est pourquoi son mode de fonctionnement va être vu en détails. Sur ces modèles, l’ensemble tube-détecteurs va effectuer une rotation plus ou moins complète autour du volume à explorer. Pendant cette rotation, un certain nombre de mesures va être fait. Ces mesures sont appelées des projections.

56
Acquisition de la coupe
Une projection est donc une mesure faite par l’ensemble des détecteurs à un certain degré de rotation. 1000 à 2000 projections pour obtenir une coupe. - soit par émission pulsée du tube - soit par coupure des détecteurs et émission continue du tube Possibilité de rotation incomplète.

57
Architecture du système

58
Convertisseur analogique-numérique
Après avoir traversé le volume à explorer, le faisceau de rayons X subit une atténuation et heurte les détecteurs. Chaque détecteur délivre alors un courant électrique dont l’intensité sera inversement proportionnelle à la densité du volume concerné. Ce courant électrique de l’ordre du pico ampère devra être amplifié pour être numérisé. Les données sont traitées par le processeur image

59
Reconstruction de l’image
Échantillonnage angulaire : pendant la rotation de l’ensemble tube-détecteurs, il aura été acquis un nombre variable de mesures correspondant à chaque projection. Le nombre de projections est variable et contribue à la qualité de l’image. Les mesures effectuées par chaque projection sont numérisées et transmises au calculateur d’images.

60
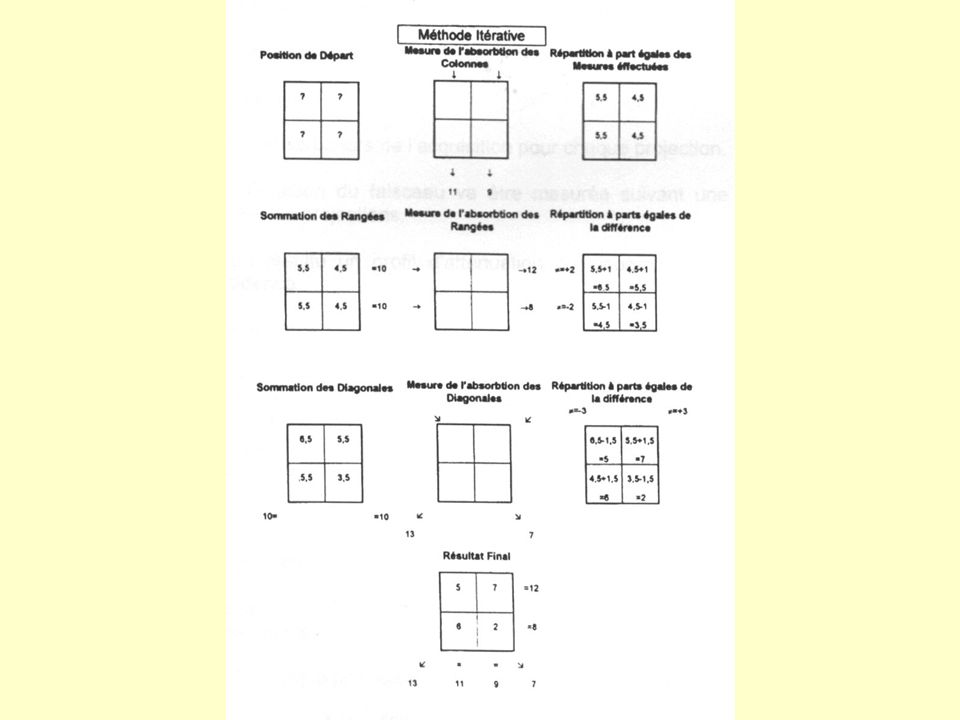
Méthode algébrique ou méthode itérative
Cette méthode appelée aussi calcul matriciel n’est plus utilisée aujourd’hui car elle présente de nombreux inconvénients. - temps de calcul très long pour les grandes matrices - le calculateur d’image ne peut commencer à effectuer ses calculs qu’à la fin de la rotation et donc à la fin de toutes les mesures Exemple d’un volume à explorer composé de 4 éléments ayant un coefficient d’absorptions différentes.

62
Épandage ou rétro-projection filtrée
3 étapes: Acquisition des profils lors de l’acquisition Rétroprojection des différents profils Correction du flou d’épandage par « artifice mathématique »

63
Mémorisation des profils lors de l’acquisition
Épandage

64
Rétro projection avec correction par algorithme de reconstruction

65
Les filtres ou algorithme de reconstruction ou de convolution qui réduisent l’effet d’étalement, vont être modulables par l’opérateur qui pourra ainsi suivant l’algorithme, choisir d’obtenir une image a contours très accentués ou lissés. en fonction de l’organe à explorer En résumé, toutes ces opérations s’effectuent dans l’ordre suivant - mesure d’un profil lors d’une projection - “filtration” ou convolution - épandage - mesure d’un nouveau profil pour une projection différente - etc. ... Cette méthode de calcul de l’image permet d’obtenir des images de façon très rapide “en temps réel” (1 à 2 secondes après la fin de la rotation ). Cette rapidité provient du fait que les calculs peuvent commencer dès le début des premières mesures.
. Cette rapidité provient du fait que les calculs peuvent commencer dès le début des premières mesures.")
66
Intérêt de la convolution

67
Visualisation de l’image
L’image obtenue est matricielle On parle de pixel Mais aussi de voxel Il faut cependant discerner les différents types de matrices

68
Matrice d’acquisition
Elle sera fonction du nombre de détecteurs en regard du faisceau de rayons X au cours des différentes projections. mais il existe des astuces ! Foyer dynamique Décalage ¼ détecteur par rapport à l’axe de rotation

69
Matrice de reconstruction
L’ordinateur va reconstruire l’image sous forme matricielle. Cette matrice peut être identique à la matrice d’acquisition. Elle peut être supérieure à la matrice d’acquisition si le calculateur d’image extrapole des valeurs Elle détermine en fonction du FOV la taille de pixel (en mm) Taille du pixel (en mm) = champ de reconstruction (en mm) / nbre de lignes ou de colonne de la matrice
 Taille du pixel (en mm) = champ de reconstruction (en mm) / nbre de lignes ou de colonne de la matrice.")
70
Matrice de visualisation
Elle est en rapport avec le nombre de points du moniteur de visualisation

71
Échelle de Hounsfield Le scanner mesure des coefficients d’atténuation
Peu représentatif Création de l’échelle de Hounsfield Arbitrairement, il a été choisi Eau = 0 UH La densité des autres tissus est donnée par nombre TDM= D’ou air= , os dense = +1000

72
Échelle des densités

73
Fenêtrage Les premières images étaient composées par le listing des différentes densités

74
Fenêtrage et échelle de gris
Elle facilite la lecture des images on attribue à chacun des points de l’image une tonalité de gris. Cependant, l’œil humain ne discerne que 20 niveaux de gris Largeur et centre

75
Échelle de gris et densité

76
Fenêtrage os / mou

77
Fenêtrage abdomen / foie

78
Fenêtrage médiastin / poumons

Présentations similaires



















>")