Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Contrôle et guidage de la locomotion humaine
HH Master Neurosciences 01/2006 Contrôle et guidage de la locomotion humaine Aspects moteurs, sensorimoteurs et cognitifs HH Master Neurosciences 01/2006

2
Contrôle tonique/postural
Contrôle locomoteur/« phasique » Contrôle cognitif

3
Bases neurales et mécaniques de la locomotion
Intégration sensorimotrice (voir Rossignol, 2006): Circuits spinaux Circuits supraspinaux Coût énergétique et Dynamique passive (voir Alexander RM, Cavagna, Ruina, Kuo, Donelan, Kram…) Principes de simplification: la neurocomputation Perception de l’espace: géométrie…
: Circuits spinaux. Circuits supraspinaux. Coût énergétique et Dynamique passive. (voir Alexander RM, Cavagna, Ruina, Kuo, Donelan, Kram…) Principes de simplification: la neurocomputation. Perception de l’espace: géométrie…")
4
La locomotion, une activité motrice
Déplacer le corps… Propulsion et maintien de l’équilibre postural Coordonner le mouvement cyclique des membres inférieurs: Forces de réaction au sol Articulations Muscles moteurs Motoneurones Voies supérieures, spinales et supraspinales…

5
La génération du pattern locomoteur chez l’animal
Locomotion quadrupède et générateurs spinaux de marche Début XXème siècle: Sherrington et Graham Brown: l’importante contribution du système spinal Années 1960: Orlovsky, Archavsky,…tronc cérébral et déclenchement de l’activité locomotrice Années : Grillner, Pearson, …la description des CPGs Années 1990: la modélisation du fonctionnement des CPGs et leurs applications à la robotique.

6
Spécificités du contrôle nerveux de la locomotion humaine
(revue de Charles Capaday, TINS 2002) La bipédie et ses conséquences en termes de contrôle postural en termes de patterns d’activation musculaire La distribution spinale des réseaux neuronaux générateurs de l’activité locomotrice, est plus large Le rôle des voies supra-spinales est probablement plus important que chez le quadrupède
 La bipédie et ses conséquences. en termes de contrôle postural. en termes de patterns d’activation musculaire. La distribution spinale des réseaux neuronaux générateurs de l’activité locomotrice, est plus large. Le rôle des voies supra-spinales est probablement plus important que chez le quadrupède.")
7
Contrôle locomoteur: niveaux d’analyse
Le cycle de marche: analyse du pas Analyse de la trajectoire

8
Le cycle de marche: organisation du pattern locomoteur
Cinématique Biomécanique Commande neuromusculaire

9
Description cinématique
Cycle caractérisée par: l’attaque par le talon (≠quadrupèdes) Une activité cyclique, répétitive Oscillations angulaires liées: Aux périodes d’appui/envol des segments propres à chaque articulation Hicheur, Terekhov, Berthoz, J. Neurophys. (2006)
 Une activité cyclique, répétitive. Oscillations angulaires liées: Aux périodes d’appui/envol des segments. propres à chaque articulation. Hicheur, Terekhov, Berthoz, J. Neurophys. (2006)")
10
Patterns d’activation musculaire
Capaday (2002)
")
11
Des robots marcheurs…de la dynamique passive du déplacement et du contrôle nerveux…
Mc Geer (since 1990) Mc Geer (since 1990)
 Mc Geer (since 1990)")
12
Vers une approche intégrative…
Hicheur & Berthoz (2006)
")
13
Le pattern locomoteur Souvent étudié au niveau des membres inférieurs…
En regroupant différents niveaux de description, possible d’observer des règles de coordination de la fonction locomotrice… Contributions passives / actives à la formation du pattern locomoteur

15
Contrôle sensorimoteur (échelles du pas et de la trajectoire)
Proprioception Contrôle visuomoteur Rôle du système vestibulaire Intégration multisensorielle Voir Rossignol Physiol. Rev pour la régulation du pattern)
")
16
Guidage de la locomotion
Stabilité de la marche Orientation du corps entier

17
(pas) Vers une approche intégrative…
Hicheur & Berthoz (2006)
")
18
La trajectoire locomotrice
Hicheur & Berthoz (2005)
")
19
Guidage de la locomotion…
Aoi, Tsuchiya & Tsujita, IEEE RAS (2004)
")
20
La tête, un contrôle indépendant ?
Stabilisation de l’orientation de la tête dans l’espace: Pozzo, Berthoz (de 1990 à 1997) Différentes tâches: équilibre dynamique, marche, course, saut… Astronautes de retour de vols Anticipation des futurs changements de direction de la marche: Grasso, Glasauer, Prévost, Takei, Berthoz (depuis 1996) Perturbations et contrôle de la direction de marche (Patla, depuis 2001) Stabilisation et anticipation lors de l’alternance entre ligne droite et virage Hicheur, Vieilledent, Berthoz (depuis 2004)
 Différentes tâches: équilibre dynamique, marche, course, saut… Astronautes de retour de vols. Anticipation des futurs changements de direction de la marche: Grasso, Glasauer, Prévost, Takei, Berthoz (depuis 1996) Perturbations et contrôle de la direction de marche (Patla, depuis 2001) Stabilisation et anticipation lors de l’alternance entre ligne droite et virage. Hicheur, Vieilledent, Berthoz (depuis 2004)")
21
the correspondance between semi circular canals geometry,
visual motion processing geometry and oculomotor space. From Llinas and Pellioniz A. Berthoz. The Brain’s sense of movement Harvard University Press 2000

22
Role of the vestibular system in Steering of locomotion a top-down process?

23
the head a stabilized plateform (a mobile reference frame).
A cooperation of the vestibular system and gaze. T. Pozzo, A. Berthoz and L. Lefort in Exp. Brain Res (1990) 82:
 82:")
24
Head stabilization during various locomotor tasks in humans
Fig. 2. A Stick figures during running in place. Note the stable orientation of Frankfort plane near the horizontal, in spite of the vertical oscillations of the head. The inset on the bottom right of the figure depicts the anatomical positions of the three markers placed at the head level: one on the lower socket of the eye, one near the meatus of the ear and one on the trapezius at the level of C7. B Enlarged views of the two links defined by the three markers during (from top to bottom) walking in place (WIP), free walking (W), running in place (R) and hopping (H) T. Pozzo, A. Berthoz and L. Lefort in Exp. Brain Res (1990) 82: HH Master Neurosciences 01/2006
 walking in place (WIP), free walking (W), running in place (R) and hopping (H) T. Pozzo, A. Berthoz and L. Lefort. in Exp. Brain Res (1990) 82: HH Master Neurosciences 01/2006.")
25
HH Master Neurosciences 01/2006
Stabilisation is also operating in the frontal plane Fig. lA‑D The experimental tasks. The subjects maintained an upright monopodal stance on a narrow cylindrical beam fixed to the floor (A, C) and an upright bipodal stance on a unstable platform (B, D). On the rocking platform (B), solid arrows depict the induced rotation and lateral translation movements of the feet. A, B The full circles indicate the positions of the six markers that were placed on body segments. C, D Links between markers were reconstructed by computer for the two respective tasks. On the rocking platform, only links on the head and trunk have been reconstructed Fig.2 A Head and trunk angular positions when the subjects stood on the beam (left) and on the rocking platform (right), averaged for all experimental conditions tested. Each triangle summarizes for each subject the mean amplitude (delimited by the corners of the base of each triangle) and the mean orientation (thick bar at the top of each triangle) of SD of head and trunk angular displacement with respect to the vertical axis (vertical dashed line). B The caricature indicates how cx and 9 were calculated T. Pozzo, Levik, Y, A. Berthoz - EBR (1995) HH Master Neurosciences 01/2006
 and an upright bipodal stance on a unstable platform (B, D). On the rocking platform (B), solid arrows depict the induced rotation and lateral translation movements of the feet. A, B The full circles indicate the positions of the six markers that were placed on body segments. C, D Links between markers were reconstructed by computer for the two respective tasks. On the rocking platform, only links on the head and trunk have been reconstructed. Fig.2 A Head and trunk angular positions when the subjects stood on the beam (left) and on the rocking platform (right), averaged for all experimental conditions tested. Each triangle summarizes for each subject the mean amplitude (delimited by the corners of the base of each triangle) and the mean orientation (thick bar at the top of each triangle) of SD of head and trunk angular displacement with respect to the vertical axis (vertical dashed line). B The caricature indicates how cx and 9 were calculated. T. Pozzo, Levik, Y, A. Berthoz - EBR (1995) HH Master Neurosciences 01/2006.")
26
Hypothesis The head stabilisation develops during childhood
There is a reversal between bottom –up control of locomotion in the child and top – down control in the adults See the work of . Assaiante et al. on the development of control by head,trunk etc. Hypothesis As this stabilisation si dependant upon Vestibular system Multisensory integration Spatial orientaion Gaze control Any deficit in these PERCEPTUAL functions will induce APPARENT MOTOR deficits

27
Spatial updating and path integration using vestibular cues…
Mittelstaedt Goal-directed linear locomotion in normal and labyrinthine-defective subjects. Glasauer S, Amorim MA, Vitte E, Berthoz A., EBR (1994) The results show that bilateral LD subjects are able to perform linear goal-directed locomotion towards memorised targets. Thus, the vestibular system does not appear to be necessary for active linear path integration.
 The results show that bilateral LD subjects are able to. perform linear goal-directed locomotion towards memorised targets. Thus, the vestibular system does not appear to be necessary for active linear path integration.")
28
top-down control of the steering of locomotion by head anticipation
top-down control of the steering of locomotion by head anticipation. (Develops in childhood). Takei et al Brain Res Bulletin 1996 Berthoz et al in Golledge et al 1999
. Takei et al Brain Res Bulletin Berthoz et al in Golledge et al")
29
Head last Head first FIG. 4. Time course of the instantaneous orientation of the head, trunk, hips and left foot antero/posterior axis during the path for two children of different age (LIGHT condition). Curves represent the average from three and four trials respectively. Head orientation is lagging behind the orientation of the other body segments in the younger child whereas it leads on the other segments in the older child HH Master Neurosciences 01/2006
. Curves represent the average from three and four trials respectively. Head orientation is lagging behind the orientation of the other body segments in the younger child whereas it leads on the other segments in the older child. HH Master Neurosciences 01/2006.")
30
Anticipation by head and gaze
Internal cognitive simulation of locomotor trajectory drives gaze. Multisensory integration is a proactive mechanism Gaze as a reference frame (Similar to arm reaching) Grasso, Amorim, Berthoz et al Neuroreport HH Master Neurosciences 01/2006
 Grasso, Amorim, Berthoz. et al Neuroreport HH Master Neurosciences 01/2006.")
31
Contribution multisensorielle au contrôle des trajectoires locomotrices
Glasauer, Amorim, Berthoz…(depuis 1995) Kennedy (depuis 2001)… Système podocinétique (Melvill-Jones…)
 Kennedy (depuis 2001)… Système podocinétique (Melvill-Jones…)")
32
Calibration des appareils sensoriels…exemple de la perception des distances par le système visuel
E.Klarreich (Nature 2001) The long view Ancient Chinese artists drew distant objects higher in the field of view, unlike European artists who generally relied on perspective, in which lines meet at infinity. The eleventh-century Arabic scholar Alhazen hypothesized that humans use angles with the ground to judge distances. James Gibson independently reached the same conclusion while helping to train pilots during World War II. Since then, however, the theory has lacked direct evidence.
 The long view. Ancient Chinese artists drew distant objects higher in the field of view, unlike European artists who generally relied on perspective, in which lines meet at infinity. The eleventh-century Arabic scholar Alhazen hypothesized that humans use angles with the ground to judge distances. James Gibson independently reached the same conclusion while helping to train pilots during World War II. Since then, however, the theory has lacked direct evidence.")
33
Teng Leng Ooi, Bing Wu & Zijiang J. He
Distance determined by the angular declination below the horizon (Nature 1998, 2001) Teng Leng Ooi, Bing Wu & Zijiang J. He A simple, but important, ecological fact is that the field of view of the ground surface extends upwards from near (feet) to infinity (horizon). It forms the basis of a trigonometric relationship wherein the further an object on the ground is, the higher in the field of view it looks, with an object at infinity being seen at the horizon… we provide support for the hypothesis that the visual system uses the angular declination below the horizon for distance judgement.
 Teng Leng Ooi, Bing Wu & Zijiang J. He. A simple, but important, ecological fact is that the field of view of the ground surface extends upwards from near (feet) to infinity (horizon). It forms the basis of a trigonometric relationship wherein the further an object on the ground is, the higher in the field of view it looks, with an object at infinity being seen at the horizon… we provide support for the hypothesis that the visual system uses the angular declination below the horizon for distance judgement.")
35
Guidage de la locomotion
Stabilité de la marche Orientation du corps entier

36
locomotion = navigation (se déplacer et s’orienter)
Au-delà des aspects sensorimoteurs…un problème cognitif…computationel

37
Le contrôle « biologique » du mouvement
La complexité du système moteur: trouver la commande inverse Dimensionnalité (degrés de liberté) Redondance motrice Les lois du mouvement biologique Observations expérimentales: des invariants moteurs…de nature géométrique / cinématique / dynamique Bernstein (depuis 1923): synergie, gel des degrés de liberté. Un contrôle optimal (Hogan, depuis 1982), Wolpert et collègues (depuis 1992): choix de la solution la moins coûteuse Todorov (2001)
 Redondance motrice. Les lois du mouvement biologique. Observations expérimentales: des invariants moteurs…de nature géométrique / cinématique / dynamique. Bernstein (depuis 1923): synergie, gel des degrés de liberté. Un contrôle optimal (Hogan, depuis 1982), Wolpert et collègues (depuis 1992): choix de la solution la moins coûteuse. Todorov (2001)")
38
Un contrôle biologique, optimal, des trajectoires:
the inverse mapping problem… des lois de simplification computationelle… Des règles de coordination motrice, observables au niveau de chaque cycle de marche… Un contrôle biologique, optimal, des trajectoires: Géométrie/cinématique des trajectoires locomotrices Minimisation d’erreur, du jerk, de la variance… Nature des variables de contrôle …

39
Decomposed kinematics: Methods

40
Scheme of the experimental layout parametrization of the trajectory
ZT: along the vertical, same orientation as the lab. Z axis XT: tangent to the trajectory, parallel to the velocity YT is deduced by requiring the axis system to be appropriately oriented Y O X ZT L: Laboratory frame YT xT,yT: trajectory in the lab frame OT Notation: in the following pages, will denote the expression of vector in frame F T: trajectory frame XT

41
From lab. Frame to trajectory frame (1)
For a given space point M: YT Y Where is the rotation matrix : XT X T Coordinates of M in the lab frame Equation of the trajectory in the lab frame or “position of the walker” Coordinates of M in the trajectory frame

42
From lab. Frame to trajectory frame (2)
The previous equation can be written in a more compact way: , transition matrix Or, even more compact:

43
Parametrization of the walker: modeling of the degrees of freedom
Body: Movement in the frontal plane: roll Movement in the sagital plane: pitch Movement in the horiz plane: yaw Head: Same rotations with different rotation axis Eye(s): Rotations in the horizontal and sagital plane (of the eye) – center O(L,R): center of the occular globe. L,R indexes are for the left, right eye.
: Rotations in the horizontal and sagital plane (of the eye) – center O(L,R): center of the occular globe. L,R indexes are for the left, right eye.")
44
Parametrization of the body (1)
ZB1: along the axis joining OB1 and OB2 XB1= XT YB1 derived from the above axes by requiring properly oriented frame OH OB3 Shoulders sensors OB2 Hips sensors ZT ZB1 “left-right balance” Transition: YB1 OB1 YT Beware of the orientation of the angle here B1

45
Parametrization of the body (2)
ZB2: along the axis joining OB2 and OB3 YB2= YB1 XB2 derived from the above axes by requiring properly oriented frame ZB1 ZB2 Direction of the global motion OB2 OB3 B2 XB1 XB2 Transition: OB1

46
Parametrization of the body (3)
YB3: along the axis joining the shoulders sensors ZB3= ZB2 XB3 derived from the above axes by requiring properly oriented frame XB2 XB3 trajectory B3 YB2 YB3 Transition:

47
Head rotations H H ZH ZB3 ZH
Mid overhead sensor Head rotations ZH ZB3 ZH H The frame is defined by the head sensors ZH, XH in the mid sagital plane YH derived from the above axes by requiring properly oriented frame XH XB3 YB3 XH Basis of occipital region YH H XH XB3 Transition:

48
Eye(s) displacements (illustrated for the right eye here)
ZRE Eye(s) displacements (illustrated for the right eye here) re ORE The transformation is similar to that of the previous case Provided a correct definition of the experimental angles, i.e re=re=0 when the gaze is aligned with the head orientation, re>0 downward, re>0 when moving to the left: YRE re PRE XRE Note: in our case M = PRE, i.e: Transition:
 displacements (illustrated for the right eye here) re. ORE. The transformation is similar to that of the previous case. Provided a correct definition of the experimental angles, i.e re=re=0 when the gaze is aligned with the head orientation, re>0 downward, re>0 when moving to the left: YRE. re. PRE. XRE. Note: in our case M = PRE, i.e: Transition:")
49
Final formula Et le cerveau ???.....
Movement of the (right) eye in the lab frame: Similarly for the left eye: Et le cerveau ???.....
 eye in the lab frame: Similarly for the left eye: Et le cerveau")
51
Dimension computationnelle
Au niveau du pas Le système locomoteur… Complexité: dynamique, cinématique… Trajectoire Contrôle postural et repère de référence Locomotion orientée vers un but spatial …

52
La covariation planaire des angles d’élévation
Lacquaniti et al., depuis 1993

53
Première observation chez l’homme
La loi de covariation planaire CP, une contrainte centrale simplifiant la coordination Première observation chez l’homme Borghese, Bianchi & Lacquaniti (1996) La loi de CP et le coût mécanique de la locomotion Bianchi et al. (1998) La loi de CP et la marche avant/arrière Grasso, Bianchi et Lacquaniti (1998) La loi de CP chez les patients Parkinsoniens Grasso et al. (1999) La loi de CP en microgravité simulée Ivanenko et al. (2001) La loi de CP dans une perspective développementale Chéron et al. (2001) La loi de CP et la marche en ligne droite/ligne courbe Courtine et al. (2003) …
 La loi de CP et le coût mécanique de la locomotion. Bianchi et al. (1998) La loi de CP et la marche avant/arrière. Grasso, Bianchi et Lacquaniti (1998) La loi de CP chez les patients Parkinsoniens. Grasso et al. (1999) La loi de CP en microgravité simulée. Ivanenko et al. (2001) La loi de CP dans une perspective développementale. Chéron et al. (2001) La loi de CP et la marche en ligne droite/ligne courbe. Courtine et al. (2003) …")
54
Hicheur, Terekhov, Berthoz, J. Neurophys. (2006)
")
55
Les paramètres du plan sont corrélés avec les propriétés de la droite de régression de ces deux variables

57
How does the geometry of the path determines (. ) / affects (
How does the geometry of the path determines (?) / affects (?) the locomotor pattern? Motor Activity Path
 / affects ( ) the locomotor pattern Motor Activity. Path.")
58
La tête, un repère stable… la question des référentiels pour la génération et le contrôle des trajectoires locomotrices

59
MOTION CAPTURE LAB ATOPOS MOTION CAPTURE Co, Stéphane Dalbéra, Paris, FRANCE VICON System, 24 cams, 120 Hz, (~ 1 mm)
 .")
60
Generation of locomotor trajectories
Hicheur & Berthoz, IEEE-RAS (2005)
")
61
Decomposed kinematics: Illustration for Head and Body movements / Trajectory

62
Effects of centrifugal acceleration changes on head/trunk postural control
Marche le long de trajets circulaires ou rectilignes, à vitesse normale ou rapide Anticipation de la direction par la tête et le tronc Un contrôle modulé: effets conjoints de la géométrie du trajet et de la vitesse de marche, effets propres à la géométrie… Rappel Acc. Centrif. = m.v² / R Hicheur & Berthoz, IEEE-RAS (2005)
")
63
Guidage de la locomotion: un regard qui anticipe
Grasso, Glasauer, Takei, Ivanenko, Prévost & Berthoz 1996, 1997, 1998, 2002

64
Orientation de la tête (blanc) et du tronc (gris)
Trajectoires enregistrées et orientations de la tête et du tronc (/direction de marche) Trajectoires enregistrées Effet de la vitesse Effet de la géométrie Orientation de la tête (blanc) et du tronc (gris) Hicheur & Berthoz, IEEE-RAS (2005)
 Trajectoires enregistrées. Effet de la vitesse. Effet de la géométrie. Orientation de la tête (blanc) et du tronc (gris) Hicheur & Berthoz, IEEE-RAS (2005)")
65
Distribution fréquentielle des oscillations…
Hicheur & Berthoz, IEEE-RAS (2005)
")
66
Gel d’un degré de liberté pour faciliter le guidage ?
Un contrôle modulé: effets conjoints de la géométrie du trajet et de la vitesse de marche, effets propres à la géométrie… Gel d’un degré de liberté pour faciliter le guidage ?

67
Guidage de la locomotion: Mouvement de la tête lors de la transition entre ligne droite et virage
Hicheur, Vieilledent & Berthoz, Neuroscience Letters (2005)
")
68
Guidage de la locomotion: un regard stabilisé un regard qui anticipe
Pozzo & Berthoz (1990, 1991) Grasso, Glasauer, Takei, Ivanenko, Prévost & Berthoz 1996, 1997, 1998, 2002
 Grasso, Glasauer, Takei, Ivanenko, Prévost & Berthoz 1996, 1997, 1998,")
70
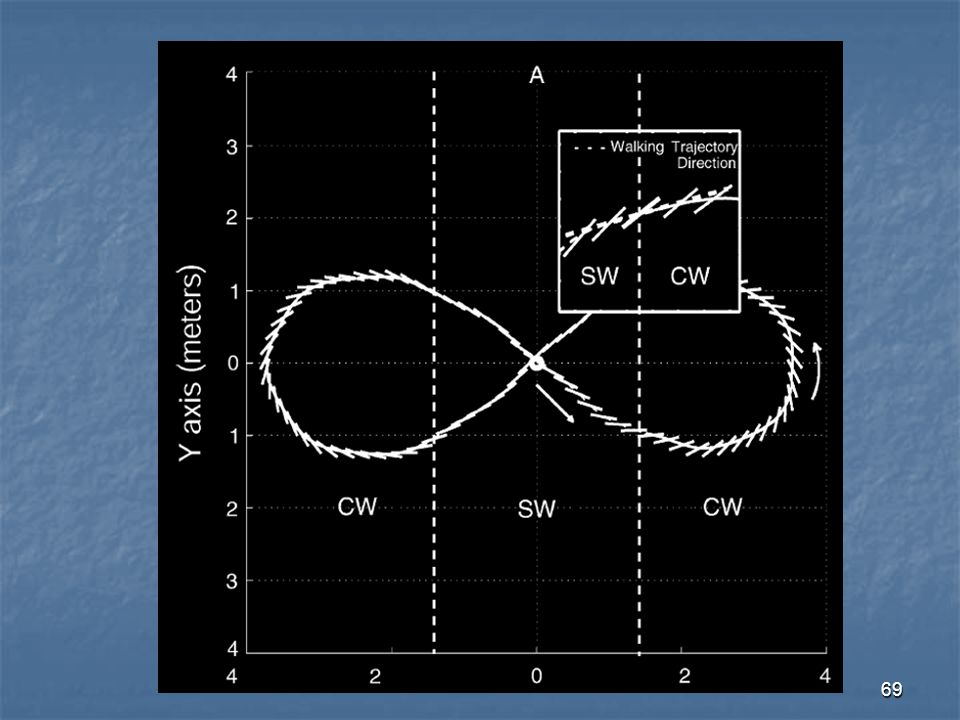
Orientation de la tête / direction de marche

71
Distribution fréquentielle des oscillations de la tête

72
Conclusions Les contraintes de stabilisation et d’anticipation coexistent dans l’élaboration de la commande du mouvement de la tête Mouvements de compensation et mouvements d’orientation (cf Imai, Cohen & Raphan, 2001) Il y a un effet mécanique mais également un effet propre de la géométrie du trajet
 Il y a un effet mécanique mais également un effet propre de la géométrie du trajet.")
73
Guidage visuel de la locomotion
LC Comp Hicheur & Berthoz (2006)
")
74
Distribution des points de fixation du regard dans un référentiel tête fixe
Hicheur & Berthoz (2006)
")
75
Mouvements de la tête, des yeux et du tronc dans le référentiel trajectoire
Hicheur & Berthoz (2006)
")
76
Hicheur & Berthoz (2006)
")
78
La stéréotypie des trajectoires
Les invariants géométriques révélateurs de principes généraux de formation de trajectoires ? Nature des mécanismes aboutissant à la génération de la trajectoire Des règles d’optimisation ? Avec Cuong PHAM, En Collaboration avec JP Laumond, LAAS Toulouse

79
Succession des pas et formation d’une trajectoire
Segmentation Stratégie de contrôle

80
The geometry of the path determines the velocity profile
Log V = Log K + 1/3 Log R Loi de puissance 1/3 Lacquaniti, Viviani and Terzuolo (1983)
")
81
Domaines d’application de la loi
Perception visuelle du mouvement (Viviani et al., 1989,1992) Mouvements de la main en 3D (Pellizer et al., 1992) Codage neural (Schwartz et al., 1999, 2001) Locomotion le long de trajets elliptiques Vieilledent et al. (2001)
 Mouvements de la main en 3D. (Pellizer et al., 1992) Codage neural. (Schwartz et al., 1999, 2001) Locomotion le long de trajets elliptiques. Vieilledent et al. (2001)")
82
Relation between curvature and velocity during locomotion along elliptical trajectories
Vieilledent S, Kerlirzin Y, Dalbera S, Berthoz A., Neurosci.Letters, 2001

83
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
84
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
85
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
86
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
87
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
88
From Hicheur, Vieilledent, Richardson, Flash & Berthoz, EBR (2005)
")
90
La locomotion: se déplacer et s’orienter…
Walking is a motor activity that combines a continuous, fine coordination of the limbs and trunk across each step with the planning strategies of goal-directed movements. Hicheur el al. EBR 2005 La stabilité motrice repose sur des règles de coordination inter segmentaire La gestion des changements de direction (le guidage) se fait de manière: Rétroactive (feedback sensoriel…transf. sensori-motrices) Proactive (modèle interne ?...une simulation mentale des trajectoires- Berthoz (le sens du mouvement)
 se fait de manière: Rétroactive (feedback sensoriel…transf. sensori-motrices) Proactive (modèle interne ...une simulation mentale des trajectoires- Berthoz (le sens du mouvement)")
91
Références GENERAL En relation avec le cours
Capaday C (2002) The special nature of human walking and its neural control. Trends Neurosci. 25: Grasso R, Glasauer S, Takei Y, Berthoz A (1996) The predictive brain: anticipatory control of head direction for the steering of locomotion. Neuroreport 7: Hicheur H, Glasauer S, Vieilledent S and Berthoz A. (2005) Head direction control during active locomotion in humans. In: Head Direction Cells and the Neural Mechanisms of Spatial Orientation, edited by Wiener SI and Taube JS. Cambridge,Massachusetts, MIT Press, p
 The special nature of human walking and its neural control. Trends Neurosci. 25: Grasso R, Glasauer S, Takei Y, Berthoz A (1996) The predictive brain: anticipatory control of head direction for the steering of locomotion. Neuroreport 7: Hicheur H, Glasauer S, Vieilledent S and Berthoz A. (2005) Head direction control during active locomotion in humans. In: Head Direction Cells and the Neural Mechanisms of Spatial Orientation, edited by Wiener SI and Taube JS. Cambridge,Massachusetts, MIT Press, p")
Présentations similaires