Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
ELEMENTS DE MACHINES Généralités sur la construction mécanique et les éléments de machines; Notions de sécurité; Fonctions mécaniques élémentaires; Etude d’un mécanisme; Dimensions linéaires nominales; Tolérances et ajustements; Tolérances de formes et de positions; États de surface; Les liaisons. E

2
Introduction un système mécanique est un ensemble d’éléments et (ou) organes, liés entre eux pour répondre à une certaine fonction pendant une certaine durée de vie, en toute sécurité.
 organes, liés entre eux pour répondre à une certaine fonction pendant une certaine durée de vie, en toute sécurité.")
3
Notions de sécurité la notion de sécurité est représentée de manière générale par le coefficient de sécurité que l’on définit par: le rapport entre la contrainte réelle agissant dans l’élément de machine et la contrainte limite que le matériau constitutif de l’élément peut supporter. Dans la plupart des cas, calculer un élément de machine, c’est vérifier que le coefficient de sécurité est supérieur à l’unité.

4
Fonctions mécaniques élémentaires
Considérons deux ensembles mécaniques (S1) et (S2), Ils sont en état physique de liaison, lorsque, sollicités par des actions extérieures, ils restent en contact par certaines de leurs surfaces pour pouvoir remplir une fonction donnée. S1 S2
 et (S2), Ils sont en état physique de liaison, lorsque, sollicités par des actions extérieures, ils restent en contact par certaines de leurs surfaces pour pouvoir remplir une fonction donnée. S1. S2.")
5
Fonctions mécaniques élémentaires
Lubrification, Protection et étanchéité Liaison Mise en position Guidage

6
Exemple Étau à serrage rapide

7
Étau à serrage rapide

8
Étau à serrage rapide

9
Étau à serrage rapide

10
Étau à serrage rapide

11
Étau à serrage rapide

12
DIMENTIONS LINEAIRES NOMINALES
En mécanique, les dimensions linéaires nominales (ou nombres préférentiels) désignent les dimensions d'une pièce : longueur, largeur, diamètre des perçages, Etc.
 désignent les dimensions d une pièce : longueur, largeur, diamètre des perçages, Etc.")
13
Dimensions linéaires nominales

14
Tolérances & Ajustements
Dimensions (choix) Tolérances Ajustement
 Tolérances. Ajustement.")
15
Dimensions (choix) La normalisation impose de choisir parmi les dimensions linéaires nominales Rappel: «nominal » signifie que la dimension réelle peut être légèrement différente en raison particulièrement des tolérances.

16
Tolérances la norme prévoit un choix tenant compte de deux paramètres : la qualité des tolérances la position des zones de tolérances.

17
Qualité de tolérance Il existe 18 qualités:
IT 01, IT 0, IT 1, IT 2 … IT 15, IT 16. Remarque: - La tolérance la plus faible correspond à la qualité 01, - La plus forte correspond à la qualité 16. - La tolérance dépend de la dimension nominale, elle est proportionnelle par paliers.

18
Qualité de tolérances

19
Position des zones de tolérances
C’est la valeur de l’écart fondamental Définition Désignation (contenant) Désignation (contenu) Position des zones de tolérance, Principaux écarts (contenant) Principaux écarts (contenus) Calcul des écarts
 Désignation (contenu) Position des zones de tolérance, Principaux écarts (contenant) Principaux écarts (contenus) Calcul des écarts.")
20
Écart fondamental ISO Il est normalisé
fonction de la dimension linéaire nominale, indépendante de la qualité de tolérance (majorité des cas).
.")
21
Désignation (contenu)
Pour les arbres, par un symbole lettre minuscule (une ou parfois deux lettres) : a, b, c, cd, d,…,z, za, zb, zc.
 : a, b, c, cd, d,…,z, za, zb, zc.")
22
Désignation (contenant)
Pour les alésages par un symbole lettre majuscule (une ou parfois deux lettres) : A, B, CD, D,…,Z, ZA, ZB, ZC.
 : A, B, CD, D,…,Z, ZA, ZB, ZC.")
23
Position des zones de tolérance
A noter que l’écart fondamental est nul pour H et h et (± IT/2) pour JS et js.
 pour JS et js.")
24
Principaux écarts (alésages)
")
25
Principaux écarts (arbres)
")
26
Principaux écarts (arbres)
")
27
Calcul des écarts Contenant: Contenu:
Écart supérieur: ES = Dmax − Dnom Écart inférieur : EI = Dmin − Dnom Contenu: Écart supérieur: es = dmax − dnom Écart inférieur : ei = dmin − dnom

28
« Le jeu, c'est l'âme de la mécanique. »
Ajustements « Le jeu, c'est l'âme de la mécanique. » En mécanique, le jeu est l'espace laissé entre deux pièces assemblées entre elles.

29
Ajustements On distingue le:
Jeu dans un assemblage de deux pièces uniquement (constituant un ajustement). Jeu ne constituant pas un ajustement
. Jeu ne constituant pas un ajustement.")
30
Jeu dans un assemblage de deux pièces uniquement
C’est ce que l’on appelle de manière générale un AJUSTEMENT On distingue 3 types d'ajustements: avec jeu; Serré (avec serrage); Incertain. CALCUL DU JEU Ajustements usuels normalisés Système arbre normal Système alésage normal Cotation
; Incertain. CALCUL DU JEU. Ajustements usuels normalisés. Système arbre normal. Système alésage normal. Cotation.")
31
Ces formes complémentaires peuvent elles coïncider parfaitement ?
AJUSTEMENT Assemblage de deux pièces s'emboîtant par des formes complémentaires. Ces formes complémentaires peuvent elles coïncider parfaitement ? Non, essentiellement, pour causes de fabrication

32
Ajustement avec jeu - Contenant plus grand que le contenu;
- Jeu positif; - Fonction: guidage

33
Ajustement avec serrage
- Contenant plus petite que le contenu; - Jeu négatif; - Montage par déformation locale des pièces - Fonction: Assemblage

34
Ajustement incertain - Les combinaisons n'aboutissent pas à un jeu de même signe. - Cas rarement utilisé car il peut poser des soucis du point vue industriel.

35
Calcul du jeu Dans le cas d'un ajustement, le jeu est donné par :
Jeu = Dalesage − darbre

36
Calcul du jeu En réalité, le jeu résultant est compris entre les valeurs extrêmes qu’il peut prendre, à savoir : Jmax = Dmax − dmin et Jmin = Dmin − dmax

37
Calcul du jeu D’où, l'intervalle de tolérance écart entre les cotes extrêmes admissibles. ITjeu = Jmax − Jmin = (Dmax − dmin) − (Dmin − dmax) Soit ITjeu = ITalesage + ITarbre Remarque: - la qualité d'un jeu, c’est-à-dire son incertitude, doit être partagée entre les deux pièces - Un jeu précis nécessitera des pièces d'autant plus précises.

38
Ajustements normalisés usuels

39
Système arbre normal système arbre normal,
l'écart fondamental de l'arbre : h (es=0)
")
40
Système alésage normal
l'écart fondamental de l'alésage : H (EI=0)
")
41
Cotation Alésage : Ø40H Arbre: Ø40g6 assemblage : Ø40H7g6

42
Jeu et cotation fonctionnelle
Jeux ne constituant pas un ajustement, Cotation fonctionnelle, Chaîne de côtes, Côte condition, Surfaces terminales, Conditions et contraintes; Exemple; Méthodologie.

43
Jeu ne constituant pas un ajustement
Pour qu’un mécanisme fonctionne normalement, des conditions doivent être assurées: jeu, serrage, dépassement, Réserve de filetage de montage, Etc.

44
cotation fonctionnelle
La cotation fonctionnelle permet la recherche des différentes cotes à respecter pour le bon fonctionnement d’un mécanisme donné: elle permet la détermination des spécifications fonctionnelles du système.

45
Côte condition La cote condition cc est un vecteur qui exprime une exigence fonctionnelle. Par convention, la cote condition (cc) sera représentée par un vecteur à double trait. Une cc horizontale sera dirigée de gauche à droite. Une cc verticale sera dirigée de bas en haut
 sera représentée par un vecteur à double trait. Une cc horizontale sera dirigée de gauche à droite. Une cc verticale sera dirigée de bas en haut.")
46
a 1 3

47
a 1 3

48
Surfaces terminales Les 2 surfaces délimitant la cote condition sont appelés surfaces terminales. Les surfaces de contact entre les pièces sont appelées surfaces de liaison. Si la cote condition est positive on parle de jeu, dans le cas contraire on parle de serrage.

49
Établissement d’une chaîne de côtes
Une chaîne de cotes est un ensemble de cotes nécessaires et suffisantes au respect de la cote condition cc. Contraintes à respecter: 1 2 3 4 5

50
Contraintes 1 La chaîne de cotes débute à l'origine du vecteur condition et se termine à son extrémité.

51
Contraintes 2 Chaque cote de la chaîne, commence et se termine sur la même pièce.

52
Contraintes 3 Il ne peut y avoir qu'une seule cote par pièce dans une même chaîne de cotes.

53
Contraintes 4 La chaîne de cotes doit être la plus courte possible, afin de faire intervenir le moins de cotes possible.

54
Contraintes 5 Le passage d'une cote de la chaîne à la suivante se fait par la surface d'appui entre les deux pièces cotées.

55
Exemple Relation vectorielle : J=a1+a3 Projection: J=a1-a3
Conditions extrêmes: Jmin=a1min+a3max ; Jmax=a1max+a3min La différence conduit à la relation sur les intervalles de tolérance Cette propriété impose de choisir pour les cotes conditions des IT les plus larges possibles, afin de réduire le coût des pièces entrant dans la constitution de la chaîne.

56
Chaîne de cotes – cotation fonctionnelle

57
Tolérances géométriques
On en distingue quatre types : Tolérances de forme, Tolérances d'orientation, Tolérances de position, Tolérances de battement

58
Tolérances géométriques de formes
Ligne quelconque Forme d’une ligne quelconque (profil ou contour) Surface quelconque Forme d’une surface quelconque Rectitude Une ligne quelconque du plan suivant une direction donnée, doit être comprise entre deux droites parallèles distante de la valeur de la tolérance. Circularité Le profil (que l'on espère assez proche de la forme circulaire !) doit être compris entre deux cercles concentriques et coplanaires dont la différence des rayons est inférieure ou égale à la valeur de tolérance. La circonférence intérieure est la plus grande circonférence inscrite dans le profil tandis que la circonférence extérieure est la plus petite circonférence circonscrite dans le profil. Planéité La surface plane tolérancée doit être comprise entre deux plans parallèles distants de la valeur de la tolérance donnée. Cylindricité La surface tolerancée doit être comprise entre deux cylindres coaxiaux dont les rayons diffèrent de la valeur de la tolérance. Le cylindre extérieur est le plus petit cylindre circonscrit. La zone de tolérance n'est contrainte ni en position, ni en orientation.
 Surface quelconque. Forme d’une surface quelconque. Rectitude. Une ligne quelconque du plan suivant une direction donnée, doit être comprise entre deux droites parallèles distante de la valeur de la tolérance. Circularité. Le profil (que l on espère assez proche de la forme circulaire !) doit être compris entre deux cercles concentriques et coplanaires dont la différence des rayons est inférieure ou égale à la valeur de tolérance. La circonférence intérieure est la plus grande circonférence inscrite dans le profil tandis que la circonférence extérieure est la plus petite circonférence circonscrite dans le profil. Planéité. La surface plane tolérancée doit être comprise entre deux plans parallèles distants de la valeur de la tolérance donnée. Cylindricité. La surface tolerancée doit être comprise entre deux cylindres coaxiaux dont les rayons diffèrent de la valeur de la tolérance. Le cylindre extérieur est le plus petit cylindre circonscrit. La zone de tolérance n est contrainte ni en position, ni en orientation.")
59
Tolérances géométriques d’orientation
Inclinaison La surface tolérancée est comprise dans une zone de tolérance définie par deux plans parallèles distants de la valeur de la tolérance. La zone de tolérance est contrainte en orientation seulement. Parallélisme La surface tolérancée est comprise dans une zone de tolérance définie par deux plans parallèles distants de la valeur de la tolérance et parallèles au plan de référence. la zone de tolérance est contrainte en orientation seulement. Perpendicularité Perpendicularité d’une ligne (axe) ou d’une surface par rapport à une droite ou un plan de référence.
 ou d’une surface par rapport à une droite ou un plan de référence.")
60
Tolérances géométriques de position
Spécification de Localisation Localisation de lignes, axes ou surfaces entre eux ou par rapport à un ou plusieurs éléments. Coaxialité/concentricité Concentricité d’un axe ou d’un point par rapport à un axe ou un point de référence. Symétrie Symétrie d’un plan médian ou d’une ligne médiane (axe) par rapport à u_ne droite ou un plan de référence.
 par rapport à u_ne droite ou un plan de référence.")
61
Tolérances géométriques de battement
Battement simple La zone de tolérance est limitée pour chaque position radiale, par deux circonférences distantes de t situées sur le cylindre de mesurage dont l'axe coïncide avec l'axe de référence. Battement simple radial La zone de tolérance est limitée dans chaque plan de mesurage perpendiculaire à l'axe par deux cercles concentriques distants de t dont le centre coïncide avec l'axe de référence. Battement simple oblique La zone de tolérance est limitée sur chaque cône de mesurage par deux circonférences distantes de t. Chaque cône de mesurage a ses génératrices dans la direction spécifiée et son axe coïncide avec l'axe de référence. Battement total Battement total d’un élément sur l’axe de référence.

62
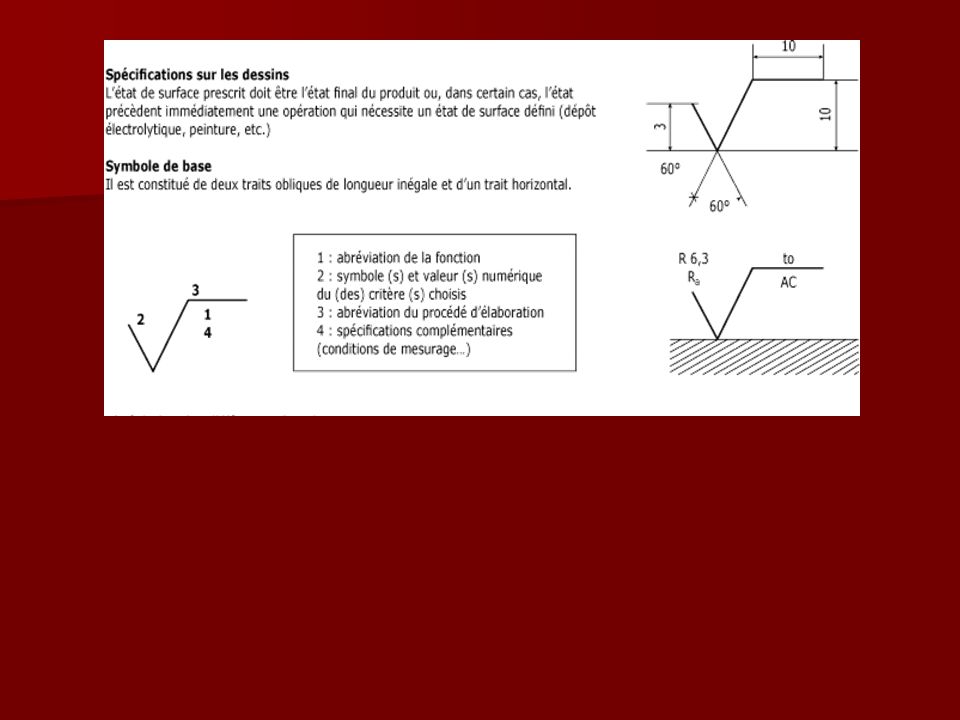
États de surface L'aptitude d'une pièce à une fonction donnée
des caractéristiques de son état de surface. les états de surface caractérisent des profils à une échelle nettement inférieure à celle associée aux défauts géométriques (profil, cylindricité, planéité, …) il existe de très nombreuses façons de caractériser l'état d'une surface.
 il existe de très nombreuses façons de caractériser l état d une surface.")
63
États de surface On classe les défauts géométriques en quatre ordres de grandeur : Défauts du premier ordre; Défauts du deuxième ordre; Défauts du troisième et du quatrième ordre; Désignation; Représentation sur un dessin.

64
Défauts du premier ordre
Ce sont les défauts de forme (unité : mm) : Écarts: de rectitude, de circularité, de planéité, de cylindricité.
 : Écarts: de rectitude, de circularité, de planéité, de cylindricité.")
65
Défauts du deuxième ordre
Ondulation (unité : micron) : ligne enveloppe supérieure du deuxième ordre passant par la majorité des saillies
 : ligne enveloppe supérieure du deuxième ordre passant par la majorité des saillies.")
66
Défauts du troisième et du quatrième ordre
caractérisent la rugosité de la surface. Les défauts du troisième ordre sont constitués par des stries ou sillons les défauts du quatrième ordre sont des défauts apériodiques constitués par des arrachements, des fentes, etc.

67
États de surface Rp Rc Rt Ra
Pic maximal observé sur la longueur analysée. Si l'on pose un repère cartésien dont l'axe des abscisses est aligné sur la ligne centrale de la surface à mesurer, le pic maximal, lu sur l'axe des ordonnées, pourra également être noté Rp= ymax (voir diagramme ci-dessous) Rc Creux maximal observé sur la longueur analysée (voir diagramme ci-dessous). Rc : Rc= | ymin | Rt Rugosité totale. Elle correspond à la somme du pic maximal et du creux maximal observé sur la longueur analysée. Rt = Rp + Rc (voir diagramme ci-dessous) Ra Écart moyen, ou moyenne arithmétique des distances entre pics et creux successifs. "Ra" correspond à ladifférence entre cette distance moyenne et la "ligne centrale". Ce paramètre "moyen" permet de donner une indication générale résumant les autres paramètres de rugosité d'une surface donnée, et est par conséquent fréquemment utilisé.
 Rc. Creux maximal observé sur la longueur analysée (voir diagramme ci-dessous). Rc : Rc= | ymin | Rt. Rugosité totale. Elle correspond à la somme du pic maximal et du creux maximal observé sur la longueur analysée. Rt = Rp + Rc (voir diagramme ci-dessous) Ra. Écart moyen, ou moyenne arithmétique des distances entre pics et creux successifs. Ra correspond à ladifférence entre cette distance moyenne et la ligne centrale . Ce paramètre moyen permet de donner une indication générale résumant les autres paramètres de rugosité d une surface donnée, et est par conséquent fréquemment utilisé.")
70
Les liaisons Définition; Hypothèses; Nature du contact;
Mobilités d’un solide; Les liaisons élémentaires; Exemples

71
Définition Liaison mécanique
On dit que deux pièces sont en liaison si elles sont en contact par l’intermédiaire de surface(s) ou de point(s).
 ou de point(s).")
72
Hypothèses solides indéformables, formes géométriquement parfaites.

73
Nature du contact Contact ponctuel; Contact linéique;
Contact surfacique.

74
Contact ponctuel La zone de contact est réduite à un point

75
Contact linéique La zone de contact est réduite à une ligne qui n’est pas forcément une droite.

76
Contact surfacique La zone de contact est une surface: Plan, Cylindre,
Sphére.

77
mobilités d’un solide Tx : Translation le long de l’axe x
z y Tx Tz Ty Rx Rz Ry Tx : Translation le long de l’axe x Ty : Translation le long de l’axe y Tz : Translation le long de l’axe z Rx : Rotation autour de l’axe x Ry : Rotation autour de l’axe y Rz : Rotation autour de l’axe z

78
Les liaisons élémentaires
A partir des trois volumes élémentaires (plan, cylindre, sphère) nous pouvons définir toutes les combinaisons de contact possibles. Plan cylindre sphère
 nous pouvons définir toutes les combinaisons de contact possibles. Plan. cylindre. sphère.")
79
Appui plan

80
Linéaire rectiligne

81
Ponctuelle

82
Pivot glissant

83
Linéaire annulaire

84
Sphérique ou rotule

85
Alésage Arbre Arrondi Bossage Chanfrein Congé Embase Epaulement
REP. VOCABULAIRE TECH- NIQUE DES FORMES DEFINITION GENERALE A Alésage Forme contenante cylindrique ou non B Arbre Élément contenu cylindrique ou non C Arrondi Surface à section circulaire partielle qui est destinée à supprimer une arête vive. D Bossage Saillie prévue sur une pièce afin de limiter la portée (surface d’appui) E Chanfrein Petite surface obtenue par suppression d’une arête sur une pièce F Congé Surface à section circulaire partielle destinée à raccorder deux surfaces formant un angle rentrant G Embase Élément d’une pièce destiné à servir de base H Epaulement Changement brusque de la section d’une pièce par usinage I Filetage Rainure(s) hélicoïdale(s) exécutée(s) à partir d’un cylindre ou d’un cône EXTERIEUR J Gorge Dégagement étroit généralement arrondi à sa partie inférieure K Lamage Logement cylindrique généralement destiné à « noyer » une tête de vis L Méplat Surface plane sur une pièce à section circulaire M Nervure Partie saillante d’une pièce servant à augmenter la résistance ou la rigidité N Rainure Entaille longue dans une pièce pour recevoir une clavette, une languette ou plus généralement un tenon O Trou oblong Trou plus long que large, terminé par deux demi-cylindres. P Taraudage Rainure(s) hélicoïdale(s) exécutée(s) à partir d’un cylindre ou d’un cône INTERIEUR
 E. Chanfrein. Petite surface obtenue par suppression d’une arête sur une pièce. F. Congé. Surface à section circulaire partielle destinée à raccorder deux surfaces formant un angle rentrant. G. Embase. Élément d’une pièce destiné à servir de base. H. Epaulement. Changement brusque de la section d’une pièce par usinage. I. Filetage. Rainure(s) hélicoïdale(s) exécutée(s) à partir d’un cylindre ou d’un cône EXTERIEUR. J. Gorge. Dégagement étroit généralement arrondi à sa partie inférieure. K. Lamage. Logement cylindrique généralement destiné à « noyer » une tête de vis. L. Méplat. Surface plane sur une pièce à section circulaire. M. Nervure. Partie saillante d’une pièce servant à augmenter la résistance ou la rigidité. N. Rainure. Entaille longue dans une pièce pour recevoir une clavette, une languette ou plus généralement un tenon. O. Trou oblong. Trou plus long que large, terminé par deux demi-cylindres. P. Taraudage. Rainure(s) hélicoïdale(s) exécutée(s) à partir d’un cylindre ou d’un cône INTERIEUR.")
87
Éléments de machine Entité matérielle remplissant une fonction donnée

88
Organes de machine Entité fonctionnelle composé de plusieurs éléments remplissant une fonction donnée

89
Lubrification entre deux surfaces en mouvement relatif se produit de la friction qui produit de la chaleur, d’où: usure des pièces, consommation d'énergie. La lubrification consiste en l’ajout d’une substance entre ces deux surfaces pour diminuer ces es effets. Cette substance peut être de: l'huile, la graisse, du graphite, ou autres.

90
Protection et étanchéité
L‘étanchéité est le résultat de l'interdiction d'un passage. L'étanchéité physique concerne l'interdiction de passage d'un solide, d’un fluide ou d’un gaz. Une enceinte est dite parfaitement étanche si aucune quantité de fluide qui y est contenue ne peut en sortir et si aucune particule ou fluide ne peut y entrer.

91
LIAISON Une liaison mécanique est, dans un mécanisme, la mise en relation de deux pièces par contact physique permettant de les rendre: partiellement solidaires, ou totalement solidaires. On parle alors de pièces liées et ce contact contribue éventuellement à la transmission d’un effort entre les deux pièces. En mécanique, on parle de: liaison, liaison cinématique ou liaison mécanique.

92
Mise en position La mise en position doit définir complètement la position d’une pièce par rapport à une autre

93
Guidage Translation Rotation

Présentations similaires