Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Introduction : D’un point de vue du modèle cinématique, une liaison encastrement n’autorise aucun degré de mobilité entre deux pièces constitutives d’un mécanisme. Degré de mobilité Symbole normalisé

2
Analyse de l’environnement : diagramme pieuvre
Solution constructive Pièce 2 Pièce 1 Milieu environnant FP FC Fonction Principale FP : Réaliser une liaison encastrement entre les pièces 1 et 2. Fonction Contrainte FC : Résister au milieu environnant

3
Décomposition de la fonction principale en fonctions techniques
FT11 Mise en position des deux pièces FT1 Positionner de façon stable les deux pièces entre elles FT12 Maintien en position stable des deux pièces FP Réaliser une liaison encastrement entre les pièces 1 et 2 FT2 Transmettre les efforts L’objectif final de la décomposition consiste à déterminer les solutions constructives (association de composants technologiques) afin de réaliser ces fonctions techniques.
 afin de réaliser ces fonctions techniques.")
4
Principes et moyens mis en œuvre dans les solutions constructives
De nombreuses solutions constructives permettent de réaliser un même assemblage. Elles s’appuient sur différents principes et mettent en œuvre des technologies variées. Un aperçu de la diversité des solutions constructives associées à la liaison encastrement peut être mis en évidence par l’analyse d’un batteur mélangeur destiné au malaxage de pâtes industrielles.

5
Présentation :

6
Exemple : Batteur - mélangeur
C : Assemblage du coussinet 47 sur le carter 9 B : Assemblage de l’arbre 7 et de la poulie 17 A : Assemblage de la plaque 40 et du corps 9 Exemple : Batteur - mélangeur

7
Exemple : Batteur - mélangeur
D : Assemblage du pied 43 et de la traverse 50 E : Assemblage de la plaque constructeur 48 et de la traverse 50 Exemple : Batteur - mélangeur

8
Réalisations de liaison encastrement
Mise en position par un appui plan entre 9 et 40. Maintien en position par goujons 38. La liaison obtenue est une liaison encastrement démontable Mise en position et maintien par surface de contact cylindrique associée à une clavette + épaulement sur l’arbre + rondelle + vis. La liaison obtenue est une liaison encastrement démontable Frettage d’un coussinet 47 sur le corps 9. La liaison obtenue est une liaison encastrement permanente directe réalisée par frettage Soudage du pied 43 sur la travers 50 La liaison obtenue est une liaison encastrement permanente directe réalisée par soudage Rivetage de la plaque constructeur 48 sur la traverse 50 par l’intermédiaire de rivets « Pop » 49 La liaison obtenue est une liaison encastrement permanente indirecte réalisée par rivetage Réalisations de liaison encastrement En voir plus En voir plus En voir plus En voir plus Frettage : Action d’emmancher deux pièces cylindriques l’une dans l’autre avec serrage important.

9
Il existe deux familles de liaison complète :
La construction d’assemblages démontables La construction d’assemblages indémontables

10
La construction d’assemblages démontables
A partir de surfaces de contact planes A partir de surfaces de contact cylindriques de révolution A partir de surfaces de contact coniques de révolution A partir de deux surfaces de contact ne laissant subsister qu’un seul degré de liberté en translation A partir de surfaces hélicoïdales

11
A partir de surfaces de contact planes
Solutions obtenues à partir d’un appui plan qui supprime dans le cas de la figure ci-contre 3 degrés de liberté Rx, Rz et Ty. A partir de surfaces de contact planes Les degrés de liberté Tx,Tz et Ry sont supprimés par adhérence entre les deux plans de contact qui résulte de l’action de l’organe de serrage constitué par l’écrou 39. Le maintien en position est assuré par l’organe de serrage. Les degrés de liberté Tx, Ty, Rx et Rz sont supprimé par obstacles : appui plan et centrage court et pion de positionnement. Le maintien en position est assuré par les vis 2 Les degrés de liberté Tx, Ty, Rx et Rz sont supprimé par obstacles : appui plan et centrage court. Le degré de liberté Ry est supprimé par adhérence les deux plans de contact qui résulte de l’action suivant l’axe y de l’organe de serrage constitué des boulons 3. Ces derniers assurent le maintien en position.

12
En voir plus En voir plus En voir plus
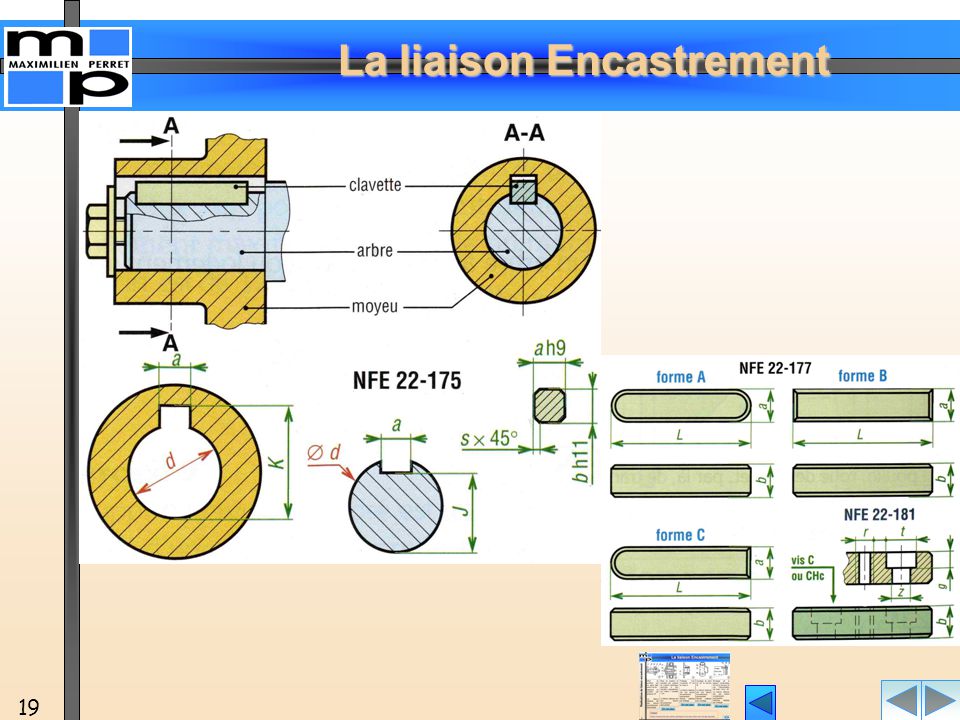
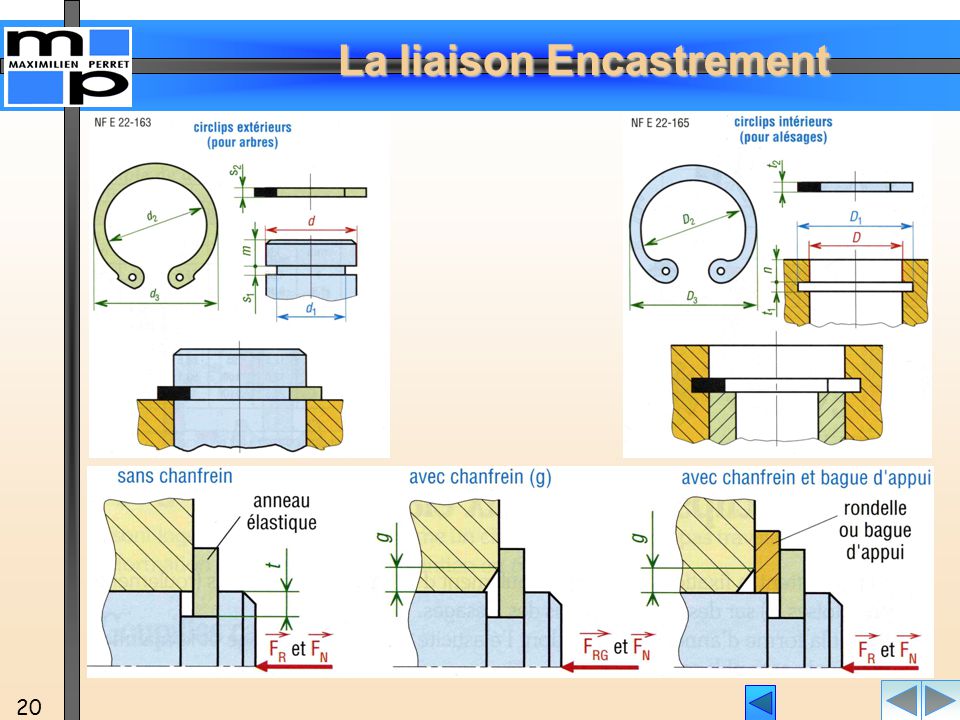
Solutions obtenues à partir du contact entre deux surfaces cylindriques qui supprime dans le cas de la figure ci-contre 4 degrés de liberté Ry, Rz Ty et Tz. 1 2 3 4 2 A partir de surfaces de contact cylindriques de révolution 1/2 Rx est supprimé par adhérence. Tx est supprimé par obstacle : épaulement à droite, vis et rondelle à gauche. Le maintien en position est assuré par la vis 1 Tx est supprimé par adhérence. Rx est supprimé par obstacle : vis de pression à téton. Le maintien en position est assuré par la vis 3. Tx et Rx sont supprimés par obstacle : Tx par l’épaulement. Rx par la clavette 34. Le maintien en position est assuré par l’écrou 28. Rx et Tx sont supprimés par l’obstacle constitué de la goupille 2. Cette dernière assure le maintien en position. En voir plus En voir plus En voir plus

13
A partir de surfaces de contact cylindriques de révolution 2/2
Solutions obtenues à partir du contact entre deux surfaces cylindriques qui supprime dans le cas de la figure ci-contre 4 degrés de liberté Ry, Rz Ty et Tz. A partir de surfaces de contact cylindriques de révolution 2/2 3 Rx et Tx sont supprimés par adhérence sous l’action de serrage des deux tampons Rx et Tx sont supprimés par adhérence sous l’action de serrage du tampon entaillé Rx et Tx sont supprimés par adhérence sous l’action de serrage provoquant la déformation de 3.

14
A partir de surfaces de contact coniques de révolution
Solutions obtenues à partir du contact entre deux surfaces coniques qui supprime 5 degrés de liberté Ry, Rz, Tx, Ty et Tz. A partir de surfaces de contact coniques de révolution Rx est supprimé par adhérence. L’action de serrage permettant cette adhérence et donc le maintien en position est obtenu par l’écrou à encoche associé à un frein écrou constitué par la rondelle 2. Rx est supprimé par obstacle constitué par la clavette disque 3. L’action de serrage est obtenue par la vis 5 qui immobilise l’ensemble.

15
A partir de surfaces hélicoïdales
1 Le goujon 1 est vissé à fond de filetage dans la pièce 2. A partir de surfaces hélicoïdales 2 Solution aussi retenue pour des éléments d’apport d’énergie comme des raccords hydrauliques

16
A partir de deux surfaces de contact ne laissant subsister qu’un seul degré de liberté en translation L’association de deux surfaces prismatiques ne laisse subsister qu’un seul degré de liberté en translation. 2 1 3 4 La tige filetée 1 est munie d’un « carré » méplat sur quatre faces ne laissant qu’un seul degré en translation ; la pièce 2 ayant la forme complémentaire. Le degré de liberté en translation est supprimé par un épaulement et une rondelle 3 sur laquelle agit un écrou 4. La solution existe aussi avec des arbres cannelés pour l’assemblage de roues dentées.

17
Maintien par goupille 1/2

18
Maintien par goupille 2/2

21
La construction d’assemblages indémontables
Elle suit les règles éditées précédemment. La différence vient du maintien en position (M.A.P.). Ce dernier ne permet plus de désolidariser les pièces sans effectuer de détérioration. Une exception peut être faite concernant la M.I.P. pour les constructions mécano soudées. Il est possible en effet de réaliser des gabarits de montage qui positionnent les pièces entre elles le temps qu’on les assemblent. On peut citer également le collage qui est une autre « façon » de souder qui peut présenter de nombreux avantages. En effet suivant le type de colle utilisé, elle peut être dissoute sans détérioration des pièces assemblées.
. Ce dernier ne permet plus de désolidariser les pièces sans effectuer de détérioration. Une exception peut être faite concernant la M.I.P. pour les constructions mécano soudées. Il est possible en effet de réaliser des gabarits de montage qui positionnent les pièces entre elles le temps qu’on les assemblent. On peut citer également le collage qui est une autre « façon » de souder qui peut présenter de nombreux avantages. En effet suivant le type de colle utilisé, elle peut être dissoute sans détérioration des pièces assemblées.")
22
Maintien en position : Par soudage Par rivetage Par frettage …..

23
Souder : C’est assembler de façon permanente deux ou plusieurs pièces, tout en assurant entre elles la continuité de matière. Soudage autogène : Les pièces à assembler, de même nature ou de composition voisine, participent à la constitution du joint ou du cordon de soudure. L’assemblage est dit homogène, c’est-à-dire fait du même métal. Brasage et soudobrasage : L’assemblage est hétérogène, la formation du cordon de soudure est assurée par la seule intervention du métal d’apport qui agit comme une colle. La température de fusion du métal d’apport doit être inférieure à celles des métaux à souder.

24
Représentation du cordon de soudure 1/3

25
Représentation du cordon de soudure 2/3

26
Représentation du cordon de soudure 3/3

27
Maintient par rivet 1/2 rivet rivetage
tête goutte de suif G si tige forgée GF Maintient par rivet 1/2

28
Maintient par rivet 2/2

29
Frettage : Zone de frettage
Action d’emmancher deux pièces cylindriques l’une dans l’autre avec serrage important. Zone de frettage Zone de variation de la matière

Présentations similaires